Labview在智能控制教学中的应用*
2016-12-02刘成林
刘成林
(江南大学 物联网工程学院,江苏 无锡 214122)
Labview在智能控制教学中的应用*
刘成林
(江南大学 物联网工程学院,江苏 无锡 214122)
阐述智能控制课程的教学内容,指出存在问题。结合自身教学经验,旨在提高本科生关于复杂工程问题的分析与解决能力,文章以示例法展示了Labview软件在智能控制课程实践教学的应用。
智能控制;Labview软件;PID控制器
一、概述
随着计算机技术、自动控制技术,以及人工智能技术的快速发展,智能控制得到了越来越广泛的关注与研究,并取得了非常广泛的应用[1]。随着对本科和研究生教育的越来越高,自动化类专业的本科或研究生阶段都在培养计划中增加了智能控制课程,而且本科智能控制课程教学收到了许多高校的重视。智能控制基础课程是在学生学习自动控制原理和现代控制理论基础控制理论课程之后开设的,是对控制理论知识的进一步提升。智能控制课程重点内容包括模糊控制、神经网络与神经网络控制以及遗传算法,其特点是:内容丰富、交叉性强,概念抽象,对于本科生的教学要求为:掌握模糊控制、神经网络和遗传算法的理论基础与设计应用。作为一门基础理论课程,智能控制课程的教学改革研究也引起了许多教师的关注[1-5]。
美国国家仪器公司开发的Labview软件使用图形进行编程,分为前面板与程序框图两部分,其包含的丰富的函数库,可以实现数据的存储、分析、显示等,所以在信号采集、计算机数据采集、数字信号处理、以及自动控制等领域得到广泛的应用[6]。相对于比较普及的Matlab仿真软件[4,5],Labview的前面板可以更形象化展示对象的特性,对控制理论的验证与仿真实验更具有虚拟仿真效果[7,8]。结合智能控制课程的特点,可以采用Labview设计仿真实验,可以提高实验内容的可视性、生动性,可以采取学生自主实验、或教师演示实验,均可以激发学生的学习热情、改善教学效果。
文章根据作者在本科《智能控制基础》课程中的教学实践,从教学内容与存在问题出发,对该门课程的进行深入分析,缺乏对学生实践创新能力的培养。对照2015版的工程教育认证[9],本科生的智能控制课程教学更加缺少培养复杂工程问题的分析与解决能力问题。通过利用Labview仿真软件设计模糊PID控制器,展示了虚拟仿真软件在智能控制中的应用,可以推广到学生实践训练和教师课堂中,增加学生学习兴趣与教学效果。
二、智能控制的教学内容及存在问题
智能控制是一门多元交叉学科,涵盖人工智能、自动控制、运筹学等等。作为自动化类本科生,在学习传统控制理论、计算机控制原理等基础专业课程之后,学习智能控制课程,可以进一步掌握先进控制理论,主要学习模糊控制、神经网络、遗传算法三部分内容。
(一)教学内容
模糊控制是基于模糊集合、模糊关系、模糊推理的一种智能控制技术。模糊控制器是一个模糊推理系统,整体表现为一个非线性函数,通常由四部分组成:(1)模糊化,将精确输入量转换为模糊集合,即输入量的模糊语言取值和相应的隶属度函数;(2)规则库,根据被控对象的特性和已有的控制经验建立模糊规则库(if-then-),确保完整性、一致性、交互性;(3)模糊推理,集结模糊规则库,将输入模糊集合映射出输出模糊集合;(4)去模糊化,将输出模糊集合转换为精确输出。在控制系统中,除了作为一个控制器外,模糊控制器也通常作为参数自调整器,可以实现非常好的控制效果。
神经网络是由简单处理单元构成的规模宏大的分布式并行处理器,从结构和功能上模仿人类脑神经系统,具有并行性和非线性等特点,能够存储经验知识、并使之可用,具有自学习、任意函数逼近器、模式分类等功能。典型的神经网络模型包括:感知器、BP神经网络、小脑模型连接控制器、Hopfield网路、柯西网络等。将神经网路应用控制对象中,主要措施有:学习控制、直接逆动态控制、神经自适应控制、和自适应决策控制等。同时,还可以将神经网络与模糊控制进行结合,构造性能更好的智能控制策略。
遗传算法主要模拟生物进化过程中的优胜劣汰、适者生存的自然选择,也是一直最优解搜索算法。遗传算法以群体为考察对象,选择合适的适应度函数,通过给群体中每个个体进行染色体编码(即基因),并计算相应的个体适应度,依次采取
复制、交叉和变异三个遗传操作步骤,产生出新一代的种群,并逐代重复进行上述三个步骤。通过遗传操作,群体不断更新为更加适应环境的新群体,最终达到最优群体,通过末代群体中的最优个体的解码,即可得到最优或次优解。
创业型企业共享型人力资源平台的建设是为助力建设创业型企业的技术创新体系,依据协同学理论,构建多主体、多因素、共同协作、相互补充的共享型人力资源管理平台,实现创业型企业、高校、高科技人才、教师、学生等多个利益相关者的协同创新发展,推动产学研深度合作,形成创业型企业联盟和高校联盟及社会高科技人才的无缝连接,以攻克高科技创新型人才培养和创业型企业可持续发展的瓶颈。
(二)存在问题
根据2015年公布的工程教育认证标准[9],本科毕业要求强调了对复杂工程问题的分析与解决能力。
由于模糊控制、神经网络、遗传算法都是建立在一定的数学理论基础之上的,所以课程理论性强、内容抽象。由于该课程设定的课时通常比较少,所以课堂教学主要集中于理论知识、概念和公式推导上,没有增设实验学时,缺乏对学生实践创新能力的培养。
此外,在本科控制理论课程(包括智能控制课程)教学过程中,控制系统的设计与分析的实践教学主要通过虚拟仿真软件(如,Matlab[4,5]、Labview等软件[6])。然而,大多本科生对这些仿真软件都没有熟练掌握,很难对将智能控制理论应用到复杂工程问题中进行仿真研究与分析。
三、基于Labview的实验示例设计
为了加强学生的复杂工程问题的分析与解决能力,可以通过课堂示例教学与课后实验习题相结合的方式来展开。文章主要考察模糊控制PID控制器的设计问题,借助Labview软件进行虚拟仿真实验。文章利用美国国家仪器(NI)公司的Labview 8.6专业开发版和附带的模糊逻辑工具箱(Fuzzy Control Toolkit)设计PID参数的模糊控制器。
被控对象选取为二阶动态模型:

其中,u为输入信号,x与y为状态变量。采用基于状态 X的PID控制器,闭环系统为:

在Labview中,构建模糊PID的仿真系统,其前面板如图1所示,模糊PID系统的仿真程序框图如图2所示。

图1 前面板
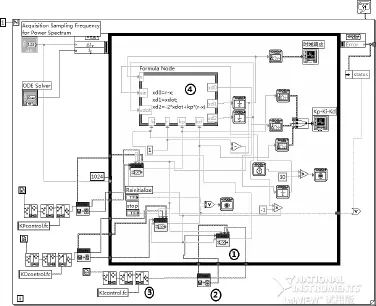
图2 程序框图
程序框图中用到的主要VI有(如图2):
1.Fuzzy Controller VI:实现模糊控制器的设计与模糊逻辑控制器的设计项目管理。使用前必须先加载控制器的数据文件,这个文件是由Load Fuzzy Controller VI输出的。
2.Load Fuzzy Controller VI:加载所有控制器参数和信息。使用此VI与Fuzzy Controller VI实现模糊控制器设计,设置数据文件的加载路径管理等。数据文件使用.fc作为文件扩展名。
3.加载路径(函数)。加载控制器的数据文件需要当前VI路径函数、拆分路径函数、创建路径函数,如图2中的KPcontrol.fc,KIcontrol.fc,KDcontrol.fc数据文件。
4.公式节点。在公式节点中,编写系统④的程序代码。此外,模糊PID控制器的设计步骤如下:
(1)在Labview软件环境下,运行Fuzzy Logic Controller D esign模块,在交互式界面Fuzzy Set Editor中设计输人、输出变量的论域及各语言值的隶属函数。输人变量e、ec的论域设为[-6,-5,-4,-3,-2,-1,0,1,2,3,4,5,6],并进行归一化处理,语言值为:负大NB、负中NM、负小NS、零ZO、正小PS、正中PM、正大PB,对应的隶属函数均为三角形;输出变量Kp、Ki和Kd的论域为[0,1,2,3,4,5,6],进行归一化处理,语言值为:零、正小、正中、正大,隶属函数也均取三角形。
(2)通过Rulebase Editor确定“IF…THEN…”形式的模糊规则,并选择相应的推理算法和解模糊方法等。模糊推理算法为Max-Min合成法,去模糊化方法为“最大隶属度法”。
(3)通过I/O Characteristic对设计的模糊控制器输出特性进行初步测试和分析,验证控制规则是否完备,是否有规则冲突以对其进行必要的修改和优化。
(4)将设计好的模糊控制器分别保存在后缀名为KPcontr ol.fc,KIcontrol.fc,KDcontrol.fc的数据文件中,在应用程序中调用。
执行程序,可以得到二阶系统的阶跃相应曲线(如图3)、以及PID控制器三个控制增益的变化曲线(如图4)。如图可见,模糊PID控制器实现了控制参数的自整定,可以实现系统
稳定,便于工程应用。
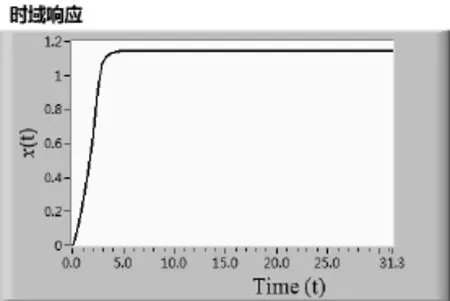
图3 模糊PID控制的阶跃响应曲线

图4 模糊PID控制参数的变化曲线
通过上述示例展示,Labview软件能够应用在智能控制器的设计与分析中。设计虚拟实验,在前面板上模拟实际对象和观察状态变化曲线,在程序框图中进行模块化编程,更加生动地展示控制器的设计与分析的有效性与生动性,能够非常好地增强学生的学习兴趣,改善教学效果。
四、结束语
针对本科智能控制课程的教学中缺乏实验学时,没有着重培养学生的实践创新能力,学生关于复杂工程问题的分析与解决能力没有得到提高,文章指出了Labview软件在智能控制器设计中的应用。通过实际示例展示了Labview的具体应用,可以推广到本科生的虚拟实验教学和课堂教学中,增强学生的学习兴趣,培养其复杂工程问题的分析与解决能力。
[1]罗兵,甘俊英,张建民.智能控制技术[M].北京:清华大学出版社,2011.
[2]刘文艺,王曦.智能控制课程设计教学改革研究[J].中国教育技术装备,2013(21):39-41.
[3]陈锡爱,卫东,王凌,等.项目教学在智能控制终端技术课程教学中的应用和研究[J].教育教学论坛,2014(51):172-173.
[4]毛玉蓉.MATLAB在智能控制课程教学中的应用[J].仪器仪表与分析监测,2008(2):8-9.
[5]刘瑞明,王经卓,龚成龙.MATLAB辅助智能控制课程教学实践[J].重庆与世界(学术版),2015(11):8-12.
[6]邓奕,韩剑.LabVIEW虚拟仪器程序设计与应用[M].武汉:华中科技大学出版社,2015.
[7]王文婷,赵锦成,谷志锋,等.LabVIEW在《电路分析基础》课程教学中的应用[J].实验科学与技术,2014(3):49-51.
[8]熊姗霞,苏韬.基于LabVIEW的自动控制原理实验教学改革的思考[J].科技创新与应用,2015(33):103.
[9]中国工程教育专业认证协会秘书处.工程教育认证工作指南[Z].2015,3.
The teaching content of intelligent control course is stated,and existing problems are pointed out.In order to improve the undergraduates'analysis and problem-solving ability of complicated engineering problems.This paper demonstrates the application of Labview software in the practice teaching of intelligent control with instance method,combined with the author'teaching experiences.
intelligent control;Labview software;PID controller
G642
A
2096-000X(2016)23-0071-03
江南大学本科教学改革研究项目(JG2015112,JG2015002);江苏高校品牌专业建设工程一期项目(PPZY2015A036)。
刘成林(1981,09-),男,汉,江苏宿迁,博士,副教授,研究方向为多智能体系统协调控制。
