地铁牵引逆变器PWM调制研究与实现
2016-12-02王永翔赵雷廷
蒋 威, 王永翔, 赵雷廷, 阮 铮
(中国铁道科学研究院 机车车辆研究所, 北京 100081)
地铁牵引逆变器PWM调制研究与实现
蒋 威, 王永翔, 赵雷廷, 阮 铮
(中国铁道科学研究院 机车车辆研究所, 北京 100081)
在研究分析用于牵引传动领域的脉宽调制技术的基础上,针对自主研发地铁牵引逆变器设计了分段调制策略。为使电机控制的采样周期与脉冲产生周期同步且保持恒定,基于设计的调制策略提出了一种具体实现方式,并给出了不同调制模式之间的平滑切换方法和网压波动时切换点的修正方法。试验结果验证了设计调制策略及实现方式的正确性。
地铁; 逆变器; 脉宽调制; DSP; 网压波动
地铁牵引传动系统中较多采用网侧直流供电,直-交传动的电机驱动方式。牵引逆变器是牵引传动系统中实施能量变换的关键设备,其控制方式通常基于脉冲宽度调制(PWM)技术。
牵引逆变器的应用一方面需要较宽的频率输出范围,但受到中大功率开关器件频率较低的限制,如全频率范围内只采用一种调制方式,在频率较低或较高区段很难同时满足开关频率和谐波含量的要求。另一方面为满足电机牵引特性的发挥,一般使逆变器输出电压按照VVVF方式起动,在额定频率点以上转为方波,如只采用一种调制方式也很难实现平稳过渡。因此牵引逆变器应采用分段调制的方法[1]。
PWM脉冲的生成具有多种数字化实现方法。从电机控制方面考虑,保持全频率范围内采样周期恒定有利于控制算法的离散化实现,并能严格保证控制程序的执行时间和实时性,因此PWM的实现也应结合电机控制的采样周期综合考虑。
本文主要针对自主研发的DC 750 V制式地铁牵引逆变器,研究分析了用于牵引传动领域的PWM调制技术,设计了分段调制策略,提出一种全频率范围内可以保证电机控制采样周期恒定的分段PWM调制实现方式,给出了不同调制模式之间的平滑切换方法和网压波动时的调制模式切换点修正方法。最后通过机组试验验证了正确性。
1 牵引逆变器调制策略设计
1.1 逆变器调制技术对比[2]
牵引逆变器在低频区一般采用异步调制方式,主要实现技术包括SVPWM或SPWM,二者同为基于载波的PWM调制技术。SVPWM相比于SPWM,将逆变器三相控制脉冲统一考虑,具有电压利用率高、谐波指标优、易于硬件实现等优点,当前被广泛采用。
在中高频区,逆变器应采用同步调制方式,输出电压波形应满足半波对称、四分之一对称等特征以抑制低频谐波,减小电机低次谐波转矩。同步调制技术可以采用载波比恒定的同步SVPWM或SPWM,也可以采用基于特定开关角度的优化PWM。后者相比前者在谐波抑制上具有更明确的指标,同时可避免在过调制区内采取额外的处理,直接完成到方波的过渡。常用的谐波优化策略有两种:特定谐波消除法(SHEPWM)和总谐波电流最小法(CHMPWM)。SHEPWM可利用N个开关角度消除N-1个低次谐波。CHMPWM则是以总谐波电流THD为优化指标求解出开关角度使总谐波含量最小,但是要达到全局谐波最优必须进行多次区段划分和波形调整[3]。考虑到地铁牵引传动的特点,首先电机基频以下范围普遍小于动车组电机,逆变器开关频率也相对较高,同步调制区域可设置的比较窄,采用CHMPWM方式可能会导致调制模式切换过于繁琐;其次由于牵引电机在高次谐波下阻抗较大,低次谐波对电机性能的影响要远大于高次谐波,因此采用SHEPWM在谐波抑制方面完全可以满足需求,也较为容易实现。
综上所述,文中的调制策略主要采用SVPWM和SHEPWM。
1.2 分段调制策略设计
设计地铁牵引逆变器分段同步调制策略时,应着重考虑以下几点:
(1) 逆变器开关频率的充分利用;
(2)避免调制模式切换过于繁琐;
(3) 在切换点前后载波比应比较接近;
(4) 调制度为1时电压应过渡到方波以达到最大电压利用。
在异步SVPWM调制模式下一般有载波频率等于开关频率。通过对SVPWM谐波的相关分析[4],在线性调制区域,提高载波频率和增大调制度可以有效减小低次谐波。牵引逆变器在VVVF控制方式下,调制度随着频率增加而增大,开关频率足够高时低次谐波会随之减小,因此SVPWM模式下应尽可能提高逆变器开关频率。
在SHEPWM模式下,产生的主要谐波次数为6n±1次谐波,其中6n+1次谐波为正序谐波,6n-1次谐波为负序谐波,两者产生的振动谐波转矩会相互抵消[1]。当SHEPWM特定开关角个数为偶数时,由于无法同时消除某个n值对应的6n±1次谐波,反而会造成低次谐波转矩的增大,因此不建议采用特定开关角个数为偶数的SHEPWM模式。文中主要采用了11分频,7分频和3分频的SHEPWM调制模式,其中11分频SHEPWM消除了5、7、11、13次谐波,7分频SHEPWM消除了5、7次谐波。

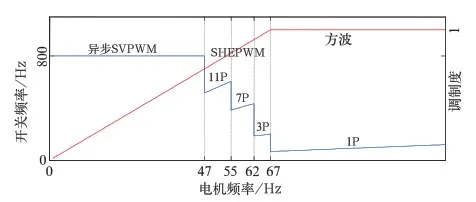
图1 设计分段PWM调制策略
2 调制策略的实现
2.1 软硬件简介
牵引逆变器的控制采用自主研发的牵引控制器实现。电机控制软件主要基于控制板卡上的TMS 320F 28335浮点型DSP芯片实现,主要功能是电机闭环控制及PWM脉冲的产生。
PWM调制作为产生逆变器控制脉冲的重要部分,可独立于电机控制算法实现。电机控制运算得到指令电压矢量的调制度和相位,再通过PWM调制算法产生逆变器驱动脉冲。控制理论要在数字处理器中实现,必然要经过离散化过程,而采样周期的选择会影响到算法的离散化实现和实时控制性能。因此,实现PWM调制时应充分考虑采样周期对电机控制的影响,使PWM脉冲产生周期与控制采样周期保持同步。
2.2 SVPWM的实现
SVPWM的原理是基于伏秒平衡原理,根据指令电压矢量的幅值和相位,计算出表征逆变器开关状态的基本电压矢量的作用时间,对指令电压矢量进行拟合[5]。当参考矢量U位于图2中所示扇区,x、y为基本矢量,zx、zy为各自对应零矢量,TpSV为PWM生成周期,则各矢量作用时间为:

图2 参考电压矢量拟合
(1)
SVPWM的DSP实现通常采用zx—x—y—zy—y—x—zx7段式开关状态序列。每个SVPWM生成周期内,每相开关电平翻转2次,通过设置DSP芯片3个ePWM模块,并根据基本矢量的作用时间计算得到需要装载的比较值,即可同时产生逆变器三相驱动脉冲。在异步SVPWM模式下,脉冲产生周期即为载波周期。DSP程序中一般在每个SVPWM周期的开始触发中断更新ePWM模块的比较值,如果电机控制算法只在该中断时运算,至少会存在1个SVPWM周期以上的延时,而SVPWM的产生周期相对较长,因此很大程度影响了电机的控制性能。为了减小PWM延时,应在一个SVPWM周期内进行多次采样控制,最近一次得到的指令电压用于计算ePWM模块的比较值装载,如图3所示。该方法可以有效减小系统延时和提高电机的控制精度,采样周期恒定,PWM周期为采样周期的整数倍。

图3 SVPWM脉冲生成周期
2.3 SHEPWM的实现
典型SHEPWM电压波形如图4所示,由于谐波成分中不含直流分量、余弦分量和正弦偶次分量,故输出电压主要谐波为6n±1次,电压波形的傅立叶函数可表示为:

图4 SHEPWM 电压波形

(2)
当区间[0,90°]内开关角个数为N时,可建立N元方程组如下
(3)
方程组中第1个方程用于满足基波电压的要求,其余N-1个方程用于消除n-1个低次谐波电压。求解一系列方程组即可得到开关角随调制度的变化规律。图5为设计调制策略中用到的11分频、7分频及3分频的开关角变化曲线。对于3分频SHEPWM波形当调制度等于1时开关角为0,这种情况下电压波形即为方波,因此方波可作为特殊3分频SHEPWM实现。根据区间[0,90°]内的开关角度,可以求出一个基波周期内所有的开关角度。

图5 SHEPWM开关角变化曲线
SHEPWM模式下,DSP芯片的3个ePWM模块分别独立用于控制各相电压,并设定PWM脉冲的产生周期与电机控制采样周期一致。将图5中的开关角曲线存储到芯片中,在程序运行时根据调制度进行实时查表调用。从SHEPWM原理可知,SHEPWM基于相电压进行调制,因此A相指令电压的相位应为指令电压矢量的相位值加上90°,B相、C相电压的相位可由A相相位推算出。每个采样周期根据指令相电压的相位变化和查表得到的开关角度,即可判断出当前周期脉冲是否需要电平变换。每相脉冲在一个PWM产生周期内可能的电平变换情况有3种:2次电平翻转、1次电平翻转和无电平翻转。将ePWM模块设置为连续增工作模式,则通过设置每个脉冲产生周期的初始电平和两个比较值CMPA、CMPB即可实现上述3种情况。
以图6所示为例,设PWM产生周期对应的计数值为Nprd,第n个采样周期上次相电压指令的相位为θ(n-1),当前的相电压指令相位为θ(n),在θ(n-1)到θ(n)之间无开关角,不需要进行电平翻转,则CMPA和CMPB的装载值均应设置为Nprd+1;在第n+1个采样周期相电压指令相位为θ(n-1),在θ(n)到θ(n+1)之间存在1个开关角αk,需要进行1次电平翻转,则相应的CMPA和CMPB装载值应为
(4)

图6 SHEPWM脉冲生成周期
PWM产生周期内存在2个开关角时实现原理类似。该实现方法使SHEPWM模式下PWM脉冲产生周期和电机控制的采样周期相同,因此控制延时相对较小。另一方面SHEPWM模式下的采样周期与SVPWM模式下也相同,即实现了电机控制的采样周期在全频率范围内保持不变。
3 调制模式切换与切换点修正
3.1 调制模式切换
不同调制模式切换时,必须避免电机电流畸变和转矩冲击。调制模式切换时引起冲击的主要原因是电流基波及谐波相位的不连续,其中基波相位不连续造成的影响最大,各次谐波的影响随谐波次数增大而降低[6]。对于基波电流可以通过控制逆变器基波电压使其相位保持连续,而谐波电流主要取决于调制模式,无法直接控制。因此切换时首要原则是保证切换前后基波电压相位连续。对于地铁牵引变流器,由于非方波调制区范围相对较窄且电机加速度较大,因此需及时完成调制模式切换。此外,SHEPWM模式下只有3分频时调制度可以达到1,调制度过高时也必须及时进行模式切换以满足基波电压幅值的要求。
异步SVPWM与11分频SHEPWM之间互相切换时,SVPWM模式下脉冲数较多且两种模式载波比相近,只要到达切换点时即可直接切换。
在SHEPWM模式下,基波电压峰值处各次谐波电流均过零。考虑到三相电压的对称性,11分频、7分频及3分频SHEPWM模式之间应在A相电压相位为30°、90°、150°、210°、270°或330°的时刻进行三相调制模式同时切换。3分频SHEPWM向方波切换时,无需考虑切换条件,当调制度增大到1时即实现无缝过渡。
3.2 切换点修正
地铁车辆在实际线路运行时,逆变器直流侧网压不可避免会出现一定程度的上下波动。当直流网压等于设计值,如图1所示,在电机额定频率点,方波基波线电压应等于电机的额定电压。如果直流侧网压低于设计值,仍按原频率点进行调制模式切换,则可能在调制度很高的情况下切换过迟达不到电压指令的要求;如果直流侧网压高于设计值,仍按原频率点进行切换,则由于切换过早导致在低次谐波抑制方面没有达到最优。因此线路运行工况需要对各个切换点根据直流网压实际值进行动态修正。
假定电机的额定电压为UN,则直流侧网压设计值应为
如果某个切换点的频率为fswk,而该切换点频率应修正为
(5)
4 试验结果
为了检验上述调制策略和实现方式,在自主研发的DC 750 V制式地铁牵引传动机组上进行了相关试验。机组牵引电机额定功率为190 kW,额定电压为585 V,额定频率为67 Hz。试验时控制采用VVVF方式,为模拟直流侧电压偏低时工况,直流侧电压约为设计值的90%。

图7 异步SVPWM切换到11分频波形
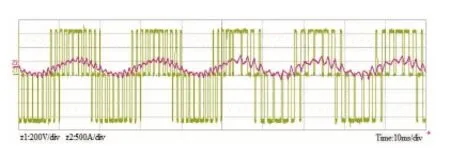
图8 11分频切换到7分频波形

图9 7分频切换到3分频波形

图10 3分频切换到方波波形
图7~图10中给出了随着电机频率增大,不同调制模式之间切换时的电机线电压、电流波形。可以看到,整个过程电机运行稳定,调制模式切换时刻电压电流无明显畸变。同时,直流侧网压低于设计值时通过对切换点的修正,保证了在调制度达到1的情况下可靠过渡到方波。
5 结 论
在对牵引逆变器调制技术分析对比的基础上,针对自主研发的DC 750 V制式牵引逆变器进行了分段调制策略的设计,并从电机控制的角度出发提出了相应的实现方式。通过试验结果可以看到,设计的调制策略完全可以满足牵引系统VVVF控制的要求;对切换点的修正保证了直流侧网压波动时调制模式可靠过渡到方波;调制模式之间切换平滑;提出的实现方式能够控制逆变器按指令正确输出电压。
[1] 冯晓云.电力牵引交流传动及其控制系统[M]. 北京: 高等教育出版社, 2009.
[2] 马小亮. 概述低开关频率PWM变频的问题及解决办法[J]. 电气传动, 2009,(5): 3-9.
[3] D. Grahame Holmes, Thomas A. Lipo.Pulse Width Modulation for Power Converters: Principles and Practice[M]. Wiley-IEEE Press, 2003.
[4] 高 莹, 谢吉华, 陈浩. SVPWM的调制及谐波分析[J].微特电机, 2006,(7): 10-12.
[5] 葛兴来. 变频调速电压同步SVPWM波生成方法仿真分析[J]. 电气传动, 2008,(9):61-64.
[6] 周明磊.电力机车牵引电机在全速度范围的控制策略研究[D]. 北京:北京交通大学, 2013.
[7] 韦克康,郑琼林,周明磊等.低开关频率下混合脉宽调制方法研究[J]. 北京交通大学学报,2011,35(5): 106-112.
Research and Implementation of Metro Traction Converter PWM Method
JIANGWei,WANGYongxiang,ZHAOLeiting,RUANZheng
(Locomotive & Car Research Institute,China Academy of Railway Sciences, Beijing 100081, China)
Based on the research and analysis of pulse width modulation technology used in traction area, the subsection modulation strategy is designed for the independent and developed metro traction inverter. In order to keep the sample period for the motor control pace with the pulse generation period, and being a constant value, a realization mode is proposed.The smooth transition method when modulation modes switching and switching point correction method when net voltage fluctuating are also introduced. The designed modulation strategy and the realization mode are verified by the experiment results.
metro; inverter; PWM; DSP; net voltage fluctuation
男,助理研究员(
2016-03-24)
1008-7842 (2016) 05-0121-05
U239.5
A
10.3969/j.issn.1008-7842.2016.05.28
