SINS/GPS组合导航系统的硬件设计
2016-11-30赵艳霞郝永平
刘 义,王 玲,赵艳霞,郝永平
(沈阳理工大学 自动化与电气工程学院,沈阳 110159)
SINS/GPS组合导航系统的硬件设计
刘 义,王 玲,赵艳霞,郝永平
(沈阳理工大学 自动化与电气工程学院,沈阳 110159)
介绍了基于微惯性测量单元(MIMU)和全球定位系统(GPS)组合导航系统的硬件设计。根据组合导航的特点和控制的要求,设计出基于TMS320C6713BGDP的导航计算机模块和数据采集处理模块,详细阐述了该系统的硬件设计思想和基本工作原理,简单介绍了组合导航系统的基本原理和软件实现的流程图。仿真结果表明,该硬件电路的设计符合组合导航系统的性能指标要求,并且具有体积小、成本低、重量轻等优点。
微惯性测量单元;全球定位系统;DSP;组合导航
近年来,Georgia Tech (乔治亚理工学院)、MIT(麻省理工学院)等研究单位合作开发了一套小型化导航系统,该系统由处理器板和传感器板组成,该导航系统性能指标如下:导航参数输出是 100Hz;板尺寸如信用卡大小,为 55mm×85mm;系统尺寸为宽 60mm,长90mm,高32mm;系统重量仅为 120g[1]。20 世纪 80 年代末期,我国开始 MEMS(微机电系统)惯性器件研制,经过 20多年的发展,在理论研究、原理样机开发等方面取得了一定的成果,初步具备工业生产的能力,但与工业发达国家相比在微型化、高精度、可靠性等各方面有很大差距[1]。由于惯性器件精度不是很高,有很大的误差,GPS易受外界环境的影响,单个的导航系统无法完成较高精度的导航任务,所以提出了组合导航系统。组合导航系统是由多个传感器组成的信息融合系统。捷联惯性导航系统具有结构简单、体积小、可靠性较好、重量轻、成本低、易于维修等特点,在一些武器中得到了实际的应用。近几年来,随着汽车工业的发展,MIMU得到了迅速的发展,其应用领域也在不断地扩大。由于MIMU的精度不是很高,其定位的误差是随着时间而变化的,因此单个的MIMU导航系统难以完成高精度、长时间的导航任务[2]。MIMU的缺点是自主性差,抗干扰能力弱,接收机的数据更新时间长,难以满足导航系统的实时性。全球定位系统(GPS)是高精度实时卫星导航系统,定位的误差与时间无关。MIMU 和 GPS 两者构成的组合导航系统的优点是克服了两者单独工作时的缺点,两者相互取长补短,能够完成较高精度、长时间的导航任务。本设计在采用DSP来进行数据采集和处理与以往的组合导航系统相比不但降低了成本而且减小了体积。
1 系统概述
该组合导航系统由GPS、卡尔曼滤波器和SINS三部分组成,组合导航原理框图如图1所示,其工作原理是当GPS的数据更新时,利用卡尔曼滤波估算本系统的误差,用来反馈控制。

图1 组合导航原理框图
SINS和GPS独立实现导航的信息计算,由卡尔曼滤波来处理两种导航数据的差值,从而估算出系统的误差,最后由系统进行校正。SINS和GPS的组合模式实现起来简单,很好地解决了两者的缺点,而且提高了系统的精度[3-4]。该组合导航系统的性能指标是实现导航系统的实时性、稳定性。
2 系统的硬件设计
系统的硬件结构如图2所示,整个系统以DSP为核心,构成导航计算机和数据采集处理模块。根据系统的需要分为以下3个部分:弹载机的设计、数据采集模块、GPS模块。

图2 硬件结构框图
系统的硬件电路实物如图3所示。

图3 硬件电路实物
2.1 导航计算机模块的设计
DSP最突出的两大特色是拥有强大的数据处理能力和高运行速度[5]。本设计采用TMS320C6713BGDP,工作主频最高达300MHz,处理性能可达2400MIPS,实现高速运算和大容量存储。拥有丰富的外设计,包括2个McBSP(多通道缓冲串口),2个McASPs(多声道音频串行端口),2个内部集成电路(I2C)总线,一个专用通用输入/输出(GPIO)模块,2个通用定时器,主机接口(HPI),以及1个能够与SDRAM、SBRAM、FLASH、异步外设无缝连接的EMIF(外部存储器接口)[6]。为了提高DSP的运行速度和存储空间,外扩了SDRAM和FLASH。FLASH选用AMD公司的AM29LV160B(BGA封装),其类型为NOR-FLASH,容量为1M×16Bit,最快访问速度达70ns,具有1000000次擦写寿命。器件符合CFI和JEDEC标准,具有软件编程,状态指示,硬件复位等功能。采用0.32μm的CMOS制作工艺,供电电压为2.7~3.6V,大小为8mm×9mm。SDRAM选用Micron公司的MT48LC4M32B2,其组织结构为1M×32bit×4banks,容量为16MB,数据接口位宽为32位,工作在133MHz总线频率时,可提供最高4256Mb/s带宽。器件支持迸发长度为1、2、4、8或整页的突发访问模式,完全满足本系统对高速存储器的要求,大小为22mm×11mm。导航计算机模块、FLASH和SDRAM与外部存储接口EMIF电路图如图4、图5、图6所示。
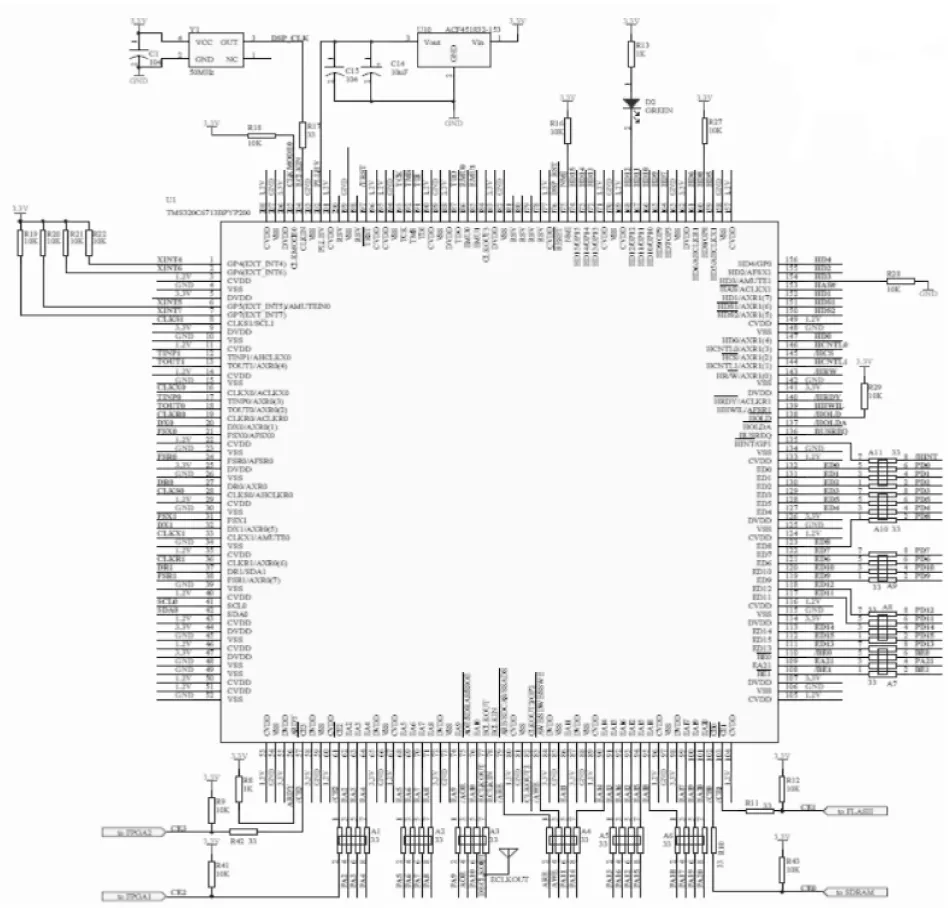
图4 导航计算机模块的电路图
2.2 数据采集模块
数据采集模块是对陀螺仪和加速度计输出的模拟信号转换为DSP能接收的数字信号。设计时需要考虑惯性器件输出信号的动态范围和带宽。惯性器件的有用信号一般处于低频段,通过设定带宽和设计低通滤波器来滤掉高频的干扰信号。

图5 EMIF与FLASH连接电路图

图6 EMIF与SDRAM连接电路图
DSP的EMIF数据线和片选信号、DSP接收的数字信号的时序图如图7所示。

图7 时序图
惯性器件的精度直接影响系统的性能,本系统采用ADI公司的单轴微惯性测量单元陀螺(ADXR620)和加速度(AD22279),其精度可以满足低速飞行器的要求。其中陀螺的量程为±300°/s,抗冲击过载为2000g,非线性误差为0.1%;加速度计的量程为±35g,单片集成了差分结构的加速度计基本单元、增益控制电路、调理电路和截止频率为400Hz的贝塞尔滤波器。AD22279具有集成度高、可靠度高、噪声小、外部电路简单等优点。模数转换芯片的位数关系到采集数据的精度,AD7606采用ANALOG DEVICES公司的产品,它的功能是16位、8个通道的同步采样模拟信号转换为数字信号的数据采集系统。其内置模拟输入箝位保护、跟踪放大器、16位电荷再分配逐次逼近型模数转换器(ADC)、灵活的数字滤波器、具有高速串行和并行接口。由加速度计和陀螺输出的模拟信号连接到AD7606的模拟输入端进行模数转换,转换后由AD7606的16位数据线和片选信号分别连接DSP的EMIF数据线和片选信号来进行数据的采集,最后由DSP进行处理。电路图如图8所示。

图8 数据采集处理电路图
2.3 GPS模块
本系统选用B1/B3/GPS/GLONASS三模四频卫星导航接收模块,具有BeiDou、GPS、GLONASS三系统定位、双系统定位、单系统定位等七种定位模式。支持B3长码;具有自主完好性检测(RAIM)功能;可在不同动态条件下捕获、跟踪卫星信号;具有空间和时间坐标转换功能;具有卫星星历和历书存储功能;原始数据输出功能;接受外部指令改变工作状态;具有自检功能。定位精度高、启动时间短、体积小、功耗低、性能可靠、适应各类载体,具有窄带抗干扰和防欺骗能力。其更新频率为1Hz,原理简单易于实现,数据传输通过RS232接口来实现。
3 软件实现
本系统的软件流程图如图9所示。

图9 软件流程图
当主程序初始化后,DSP首先进行初始对准,通过DSP的计算推算出弹体的初始姿态。本系统的GPS的数据每1s刷新一次,MIMU模块的数据每10s更新一次,因此要在软件上实现GPS的优先级要高于MIMU模块。卡尔曼滤波的采样设计是一定要和GPS的更新速率一致。采集到的数据由SINS进行解算,解算出其速度、位置,最后由RS232串口输出。GPS的数据更新时,利用卡尔曼滤波估算本系统的误差,用来反馈控制。本系统只要有GPS信号的存在,就必须利用GPS信号对MIMU的信号进行实时校正,控制惯导误差由于时间累积导致的发散特性。在本系统GPS的优先级要高于定时器中断优先级,从而保证系统的精度[7]。
4 实验仿真及结果
为了验证该系统工作的性能指标,利用实验室的三轴转台对该组合导航系统进行了测试,结果表明该系统性能良好。陀螺仪和加速度计的实验仿真如图10、图11所示。

图10 陀螺仪仿真图

图11 加速度计仿真图
最后进行跑车实验表明具有较高的定位精度。仿真图如图12所示。

图12 跑车实验仿真图
通过两组实验证明:与以往的导航系统相比,该组合导航系统具有小型化、低成本、实时性、稳定性,能够满足定位和导航的要求。
5 结束语
本系统利用计算平台和陀螺、加速度计和GPS接收机等多种传感器,利用DSP芯片实现了导航数据信息的实时采集、解算和数据融合,信号的采集和处理可同时实现,实现系统的快速性。本系统抛弃了以往的DSP+FPGA或DSP+CPLD进行数据采集和处理的模式。实验结果表明本系统结构简单,对导航信息能够实时处理,能够提供稳定、高质量的导航信息,具有一定的应用价值。
[1]王菲.SINS/GPS组合导航系统研究[D].北京:北京理工大学,2015.
[2]彭允祥.捷联惯导与导航卫星组合技术的发展趋势[J].导弹与航天运载技术,1999(4):58-62.
[3]秦永元,张洪钺,汪叔华.卡尔曼滤波与组合导航系统[M].西安:西北工业大学出版社,1998:44-56.
[4]秦永元.惯性导航[M]北京:科学出版社,2006:58-64.
[5]刘向宇.DSP嵌入式常用模块与综合系统设计实例精讲[M].北京:电子工业出版社,2009:1-15.
[6]三恒星科技.TMS320C6713DSP原理与应用实例[M].北京:电子工业出版社,2009.
[7]钟乐,胡延霖,陈永明,等.一种基于DSP的SINS/GPS组合导航系统实现[J].船舶电子工程,2011(2):55-57.
(责任编辑:马金发)
The Hardware Design of SINS/GPS Navigation System
LIU Yi,WANG Ling,ZHAO Yanxia,HAO Yongping
(Shenyang Ligong University,Shenyang 110159,China)
Hardware design of integrated navigation is introduced by the micro inertial measurement unit (MIMU) and global positioning system (GPS).According to the characteristics and control requirements of the integrated navigation,navigation computer module and data collection and processing module are designed by TMS320C6713BGDP.Hardware design idea and basic principle in detail are expounded,which introduces basic principle of integrated navigation system and software flow chart.The application shows that,hardware circuit designing can meet the requirements of the performance index of the integrated navigation system,which has the advantages of small volume,low cost,light weight.
micro inertial measurement unit;global positioning system;DSP;integrated navigation
2015-11-25
国家863计划资助项目(2009AA04Z167)
刘义(1989—),男,硕士研究生;通讯作者:王玲(1960—),男,教授,研究方向:嵌入式计算机应用及非线性控制系统。
1003-1251(2016)05-0001-05
V249.3
A