MEMS陀螺技术国内外发展现状简述
2016-11-30
中国运载火箭技术研究院研究发展中心,北京 100076
一、前言
微机电系统(Micro Electromechanical System,MEMS)发展于20世纪90年代,是在微电子制造技术发展的基础上随着精密微型机械制造技术的发展而成长起来的,尺寸从微米到毫米级,集微型传感器、微型执行器、微型传动结构、处理电路及接口于一体,具有可批量生产、微型化、集成化及多学科交叉等特点。
以MEMS技术为基础的微陀螺是一种重要的微惯性器件。它以体积小、价格低、功耗小、可靠稳定、可批量生产等优点适用于各种制导航空弹药、微小飞行器、稳定平台、机器人等军事领域,受到了各军事强国的青睐。
二、MEMS陀螺的军事需求
在军事应用领域,MEMS 微陀螺主要用于导航制导、姿态测量与稳定以及引信等方面。各国竞相发展的各类远程制导炮弹、灵巧弹药以及各种常规炸弹制导化改造对惯导系统精度要求不是很高,但要求成本低廉、反应时间短、动态范围宽、体积重量小、环境适应能力强。从实践经验看,低成本微惯性组合导航系统在上述武器装备建设中最具竞争力。微陀螺是微惯性系统的关键部件,有着广阔的军事应用前景。
三、MEMS陀螺的国外发展现状
Draper 实验室于 1985 年就着手微机械陀螺的研制,先后研制了框架式角振动微陀螺、音叉式线振动微陀螺及振动轮式微陀螺。其漂移由1994年的4000°/h 上升到 2000 年的 10°/h。图 1 为 Draper实验室1993 年研制的新型音叉式线振动微陀螺仪[1]。相对于框架式结构的硅微机械陀螺,在性能指标上提升很大。该微陀螺在封装环境为100mTorr时的标度因数为50m V/rad/s,非线性度小于0.2%,驱动方向和检测方向上的Q值分别为40000和5000。
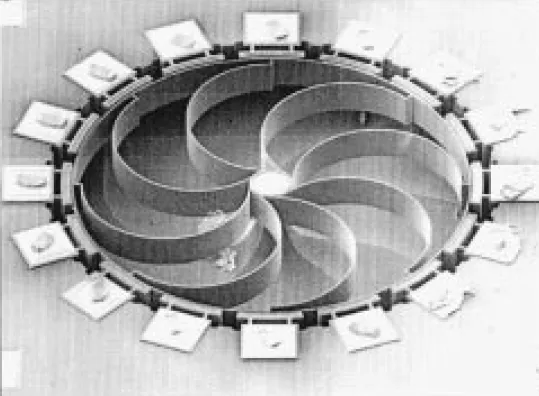
1994年,美国密歇根大学报道了一种振动式环形微机械陀螺[2],其主要结构为一系列弧形梁支撑圆环,在圆环的四周分布驱动及检测电极。由静电力使陀螺进入椭圆形驱动模态,角速度引入的柯氏力使其能量由第一模态向第二模态转移。在2001年使用HARPSS工艺进行加工制作的成品如图2所示[3]。圆环直径为1.1mm,结构厚度为80pm,深宽比达20: 1,工作频率在20kHz左右。在其品质因数为1200时,其分辨率可达0.01°/s/√Hz,减小寄生电容及提高品质因数可以大幅度地提高其分辨率。
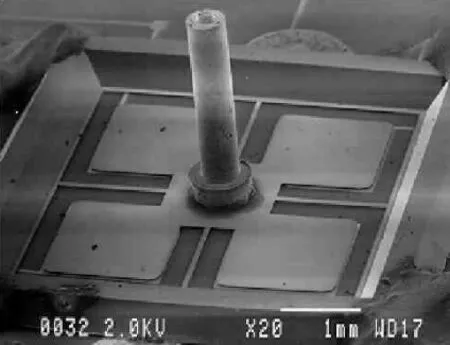
美国 Jet Propulsion Laboratory实验室在 NASA的资助下,一直致力研究应用于航空航天领域的高性能MEMS陀螺。1997年研制出一种四叶体式微机械陀螺仪(JPL/Boeinggyroscope)[4],如图3所示。在中间装配了一根金属杆用来增大检测质量块的质量,金属杆直径为50μm,长度为5mm,并对器件逬行了真空封装来提高其Q值。器件工作频率为l.4425kHz,其驱动与检测模态的谐振频率差为7Hz,性能测试结果:标度因数24mV/°/s,偏置稳定性 7°/h,角度随机游走 6.3°/√hr。
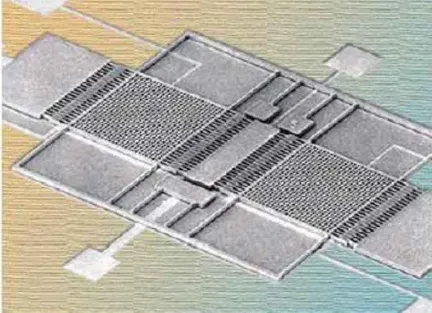
1999 年,日本横滨技术中心的研究人员对Draper 实验室提出的微陀螺结构进行了改进,为减小驱动模态与检测模态之间的交叉耦合从而减小正交误差,为驱动模态和检测模态设计了独立的支承梁结构,如图4所示[5],该陀螺基于SOI硅晶圆制造,交叉耦合度只有1 %,10Hz带宽时的分辨率达到0.07°/s。
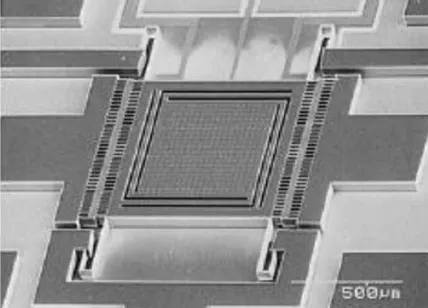
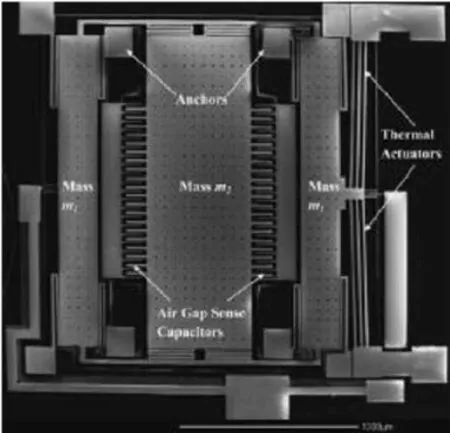
2010年,巴基斯坦应用科学与工程学院与加拿大皇后大学合作研制了一种电热驱动式共振角速率微陀螺仪,如图5所示,该微陀螺的结构由三个由同一个框架驱动的质量块组成,其敏感部件依靠热执行器进行驱动,通过检测电容的变化实现对柯氏力大小的测量。当驱动电压为1.3V 2.99kHz 时,敏感部件在驱动方向振动幅值为4.2μm,功率0.36W,相对于梳齿驱动的传统微陀螺具有很高的Q值[6]。
2010年,挪威sensoNor公司报道的蝶形陀螺属于偏转振动陀螺[7],如图6所示。蝶形陀螺采用了音叉式的工作结构,驱动和检测模态均为反相的扭转振动。音叉结构有助于降低轴向加速度的干扰。其目标精度为:工作量程:±500deg/s,标度因素精度 ±300ppm,角度随机游走0.002°/√hr, 即 0.12°/hr√Hz,零偏稳定性 0.04°/hr,零偏重复性 0.1°/hr。
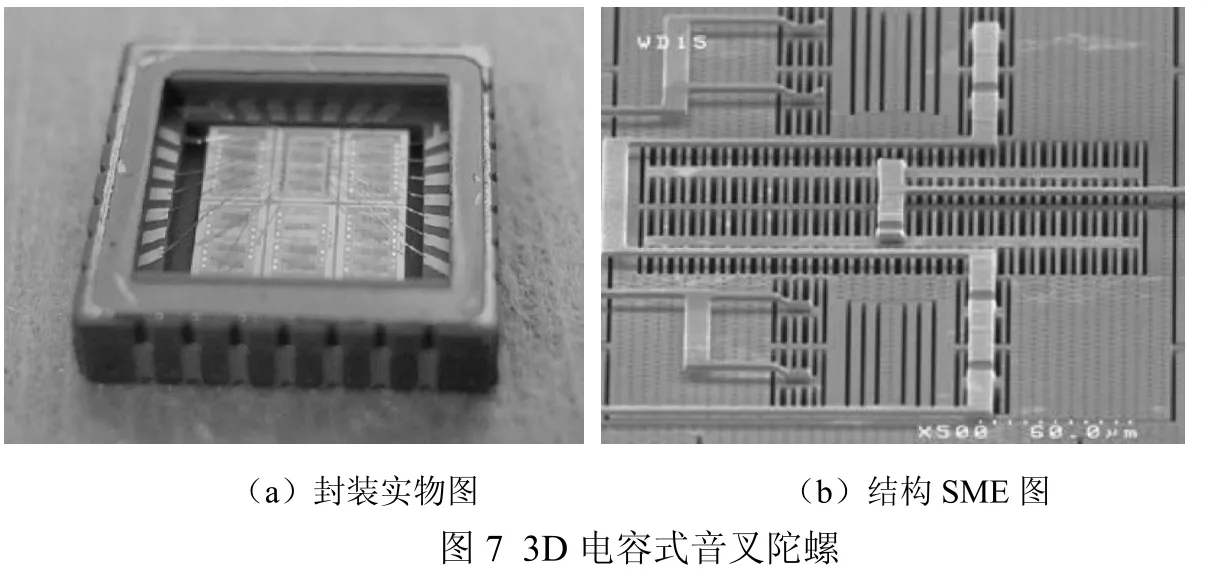
2013年,法国电子与信息技术实验室研制了一种3D 电容式音叉陀螺,如图7所示,其具有低寄生电容的[8]。该微陀螺基于悬挂横向电极实现了面外敏感,在器件Si厚度为30μm的SOI晶圆上制作的微陀螺运动部件,通过在磷硅玻璃牺牲层的顶部沉积多晶硅来实现顶部电极和连接线的悬挂。这种3D设计方案采用横向悬挂电极,3D敏感结构可以实现面外检测从而进一步降低微陀螺的寄生电容。
四、MEMS陀螺的国内发展现状
我国在微陀螺领域的研究起步较晚,经过近些年的努力,关键技术研究有长足的进步,性能有大幅提高。清华大学、北京大学、东南大学、中北大学、上海微系统、航天时代电子公司、电子科技集团26所和13所等单位已经研制出具有一定精度的样机。
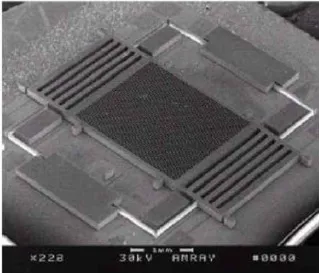
2003年,中科院上海微系统研究所的研究人员研制了一种槽缝陀螺,结构如图8所示[9]。该陀螺基于深层反应离子刻蚀(DRIE)工艺制备,采用静电式驱动,电容式检测。其驱动模态频率为460Hz,Q值为102.5检测模态频率为550Hz,Q值为106.5,在大气环境下的标度因数为20mV/°/s,非线性度为0.56%。
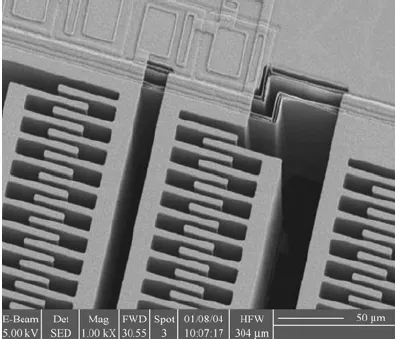
清华大学在2006年报道了一种微机械陀螺无需转台的标度因数确定方法,陀螺结构如图9所示[10],在大气下工作,结构厚度为80μm,深宽比达25。
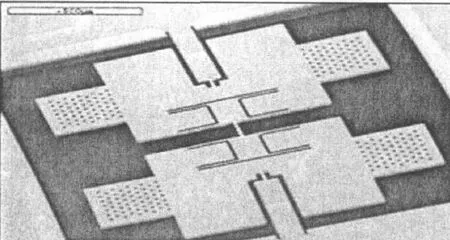
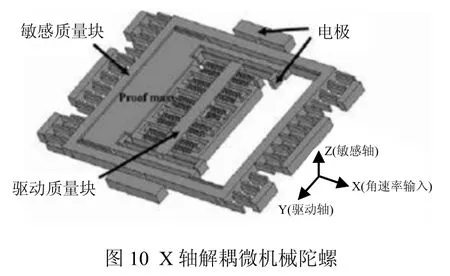
北京大学在2008年报道了一种大气下工作的单质量块双解耦陀螺[11],如图10所示。驱动与检测都采用变面积电容,所受阻尼主要为滑膜阻尼。此陀螺检测的角速度为X方向输入的角速度,外框随X轴输入的角速度大小产生绕y轴的扭转运动。测试结果为:标度因数为3mV/°/s,量程±300°/s,噪声基底 为 0.1°/s√Hz,相当于360°/hr√Hz。
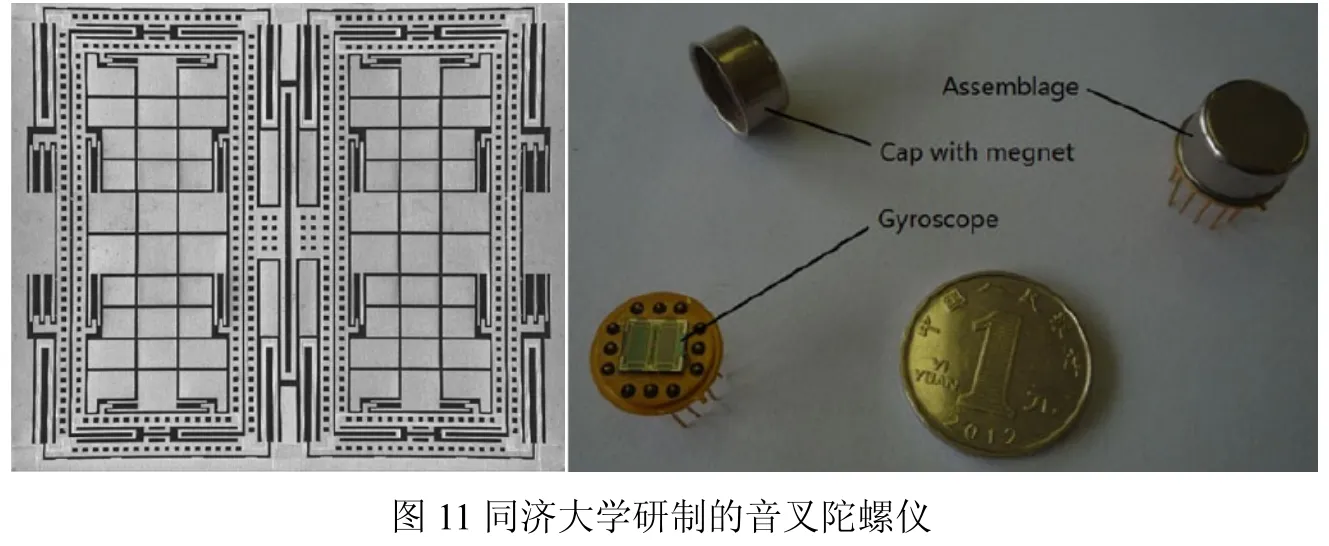
2014年,同济大学研制了一种可用于高g冲击环境的音叉陀螺仪,如图11所示[12]。该微陀螺采用由中间的连梁连接的双对称框架结构以提高它的耐冲击性,通过体硅微机械加工技术在300μm厚硅片上加工而成,其工作频率达到10kHz。微陀螺驱动和检测模态的工作频率分别为10240Hz和11160Hz,沿X轴陀螺仪的耐冲击性为15000g,Y轴为14000g, Z轴为11000g。
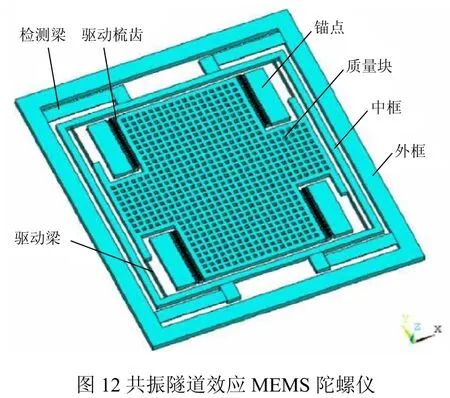
2015年,中北大学设计了基于静电梳齿驱动介观压光效应检测的微机械陀螺,该微陀螺的工作原理可表述为:当交变电场施加在静电驱动梳齿电容上时,质量块在静电驱动力的作用下往复振动。当敏感方向有角速度输入时,由柯氏效应原理,将在检测方向产生交变柯氏力,柯氏力驱动质量块和中框在检测方向产生振动,检测梁的弯曲是布置与梁上的光子晶体产生应变(应力),通过检测光子晶体的透射率变化即可解算出输入角速度的大小。其结构如图12所示[6]。
五、结束语
本文根据对国内外MEMS陀螺进行了充分调研,并对它们的基本原理、优缺点和技术指标进行了简单的介绍。这几种MEMS陀螺都具有体积小、重量轻、成本低和批量生产等独特优点,使得它们都较适合应用在惯性导航、自动控制等相关领域,因而具有广阔的应用前景。随着微机电技术的发展和新型材料的应用,MEMS陀螺的种类将进一步多样化,MEMS陀螺将在惯性导航和自动控制等方面发挥越来越重要的作用。