一种磁通反向式永磁电机齿槽转矩优化方案的研究
2016-11-29卢栋,亢凯,吴昊
卢 栋,亢 凯,吴 昊
(山东大学,济南 250061)
一种磁通反向式永磁电机齿槽转矩优化方案的研究
卢 栋,亢 凯,吴 昊
(山东大学,济南 250061)
针对磁通反向式永磁电机较为突出的齿槽转矩问题,通过二维有限元软件仿真比较了三种不同结构的磁通反向式永磁电机即内、外转子等齿宽及内转子不等齿宽的齿槽转矩。仿真分析表明,由原有样机的内转子齿等宽转变为转子齿宽度为8°和20°相结合的结构可最大程度上消弱齿槽转矩。
磁通反向式永磁电机;齿槽转矩;转子不等齿宽;仿真分析
0 引 言
随着现代社会电气化水平的提高,电机产品在众多领域都发挥着不可替代的作用,并且朝着小型化、轻型化的趋势发展。人们对电机的要求也越来越高,包括运行更加平稳,更高的功率密度,控制更加灵活,更强的恶劣环境适应能力等方面。基于目前的电机发展趋势,将开关磁阻电机与永磁电机(无刷直流电机)有机结合的磁通反向式永磁电机(以下简称FRM)应运而生,兼具二者的双重优点,是一种新型的双凸极永磁电机[1]。
由于电机自身的双凸极结构, 会产生较大的齿槽转矩,从而引起电机振动和噪声。针对FRM齿槽转矩的问题,有研究者通过采用改变永磁体形状、斜极[2]、转子分段法[3]等方法试图达到削弱齿槽转矩的目的。本文给出了一种转子凸极不等齿宽削弱齿槽转矩的优化方案,利用电磁场有限元分析,计算使用本方案前后的齿槽转矩,通过对比分析,验证了该方法的有效性。
1 内、外转子等齿宽的FRM齿槽转矩的比较分析
本文根据研究需求,设计出了容量、尺寸、造价基本一致的内、外转子等齿宽磁通反向式永磁电机,即6/14极外转子等齿宽FRM如图1所示,6/14极内转子等齿宽FRM如图2所示。
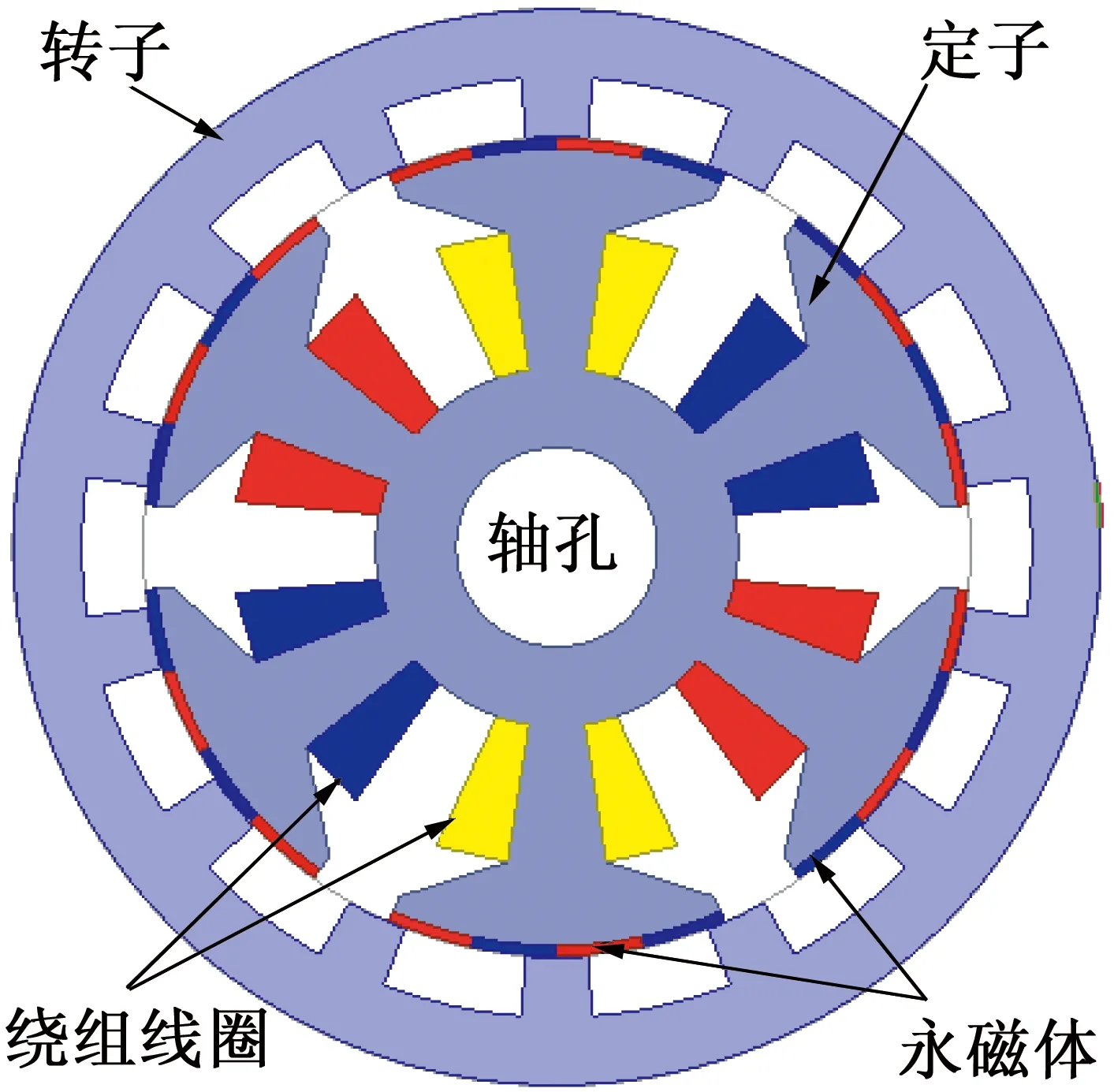
图1 6/14极外转子等齿宽FRM结构图

图2 6/14极内转子等齿宽FRM结构图
目前进行试验的样机为6/14极内转子FRM,如图2所示。电机结构为6个定子凸极和14个转子凸极,绕组放置在定子凸极上,并采用集中绕组的形式,空间相对的两个定子齿上的绕组串联构成一相,永磁安置在定子凸极齿上,每个定子凸极齿装有两对永磁体,相邻定子极下靠近的两块永磁体充磁方向相同。
根据有限元分析,我们可以计算得出电机齿槽转矩的值,采用磁动势图表法,画出在一个齿槽转矩周期内磁通对应于磁动势的变化波形。只要获得任一极下的磁动势图,就可以容易地推算出随着转子位置的变化所产生的齿槽转矩的瞬时值[4-6],如下:
(1)
然后将每一个极下的齿槽转矩进行叠加,就可以获得电机总的齿槽转矩。本文采用Ansoft仿真软件对6/14极外转子结构的FRM进行有限元计算,得出的电机齿槽转矩如图3所示。
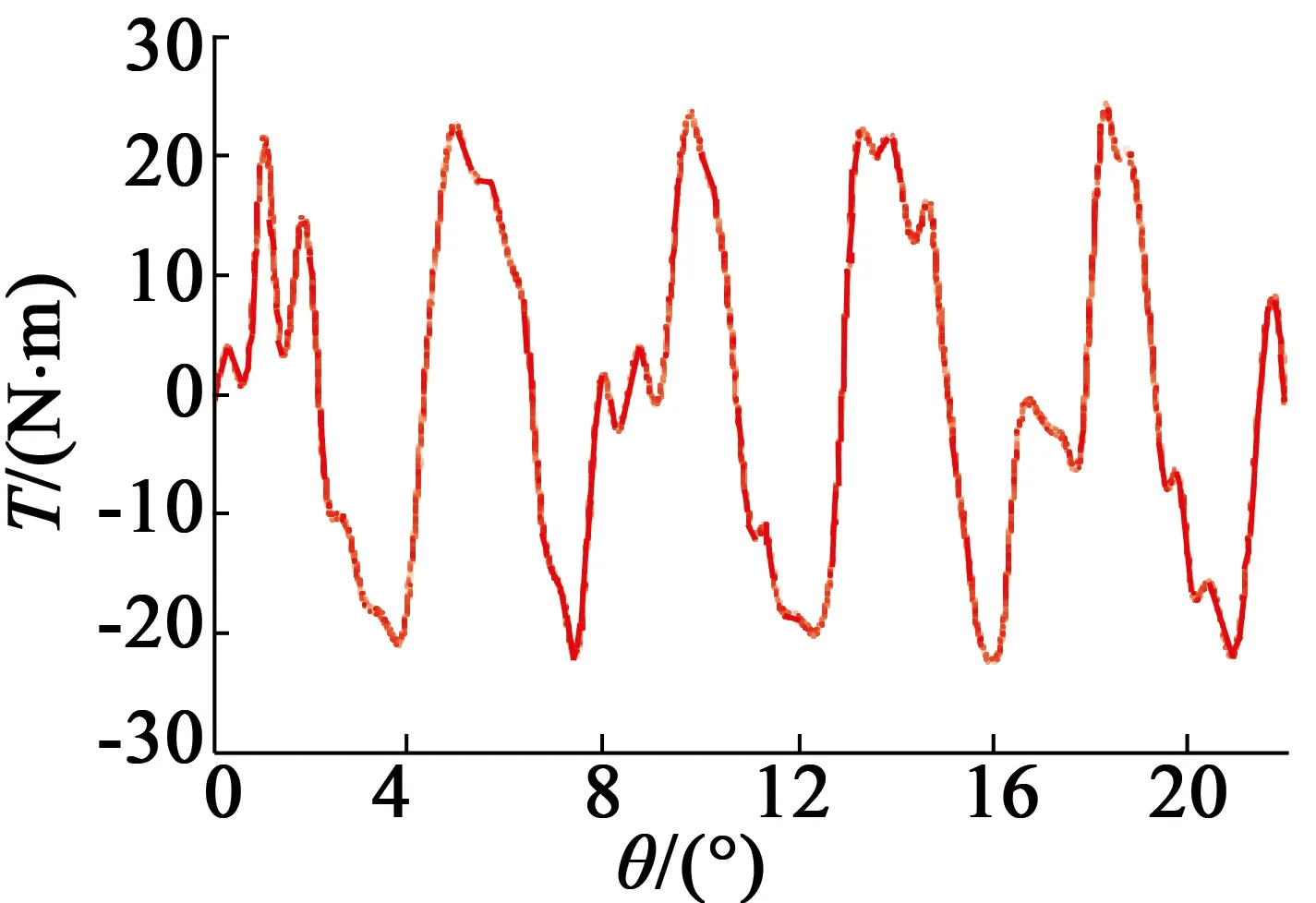
图3 6/14极外转子等齿宽FRM的齿槽转矩
从图3中可以发现,在没有斜极等减小齿槽转矩措施的情况下,外转子FRM的齿槽转矩波动较为明显,并且数值较大,严重影响了电机的性能。
将外转子结构的FRM设计成具有和内转子的FRM相似或相近的尺寸和参数,内转子结构同外转子结构的FRM的齿槽转矩对比如图4所示。

图4 内转子结构与外转子结构的齿槽转矩比较
从图4中可以发现,与相同尺寸下的外转子结构相比,两者的齿槽转矩都比较明显,并且波动较大,但是外转子结构时的齿槽转矩比内转子结构波动更为明显,并且幅值较大。所以在齿槽转矩方面,内转子结构的磁通反向式永磁电机的样机要优于外转子结构的FRM。
2 改变转子齿宽对齿槽转矩的影响
由上文可以看出,采用内、外转子等齿宽结构的FRM齿槽转矩都会很大。对于内转子FRM,如果保持定子结构不变,改变转子结构,将转子齿变为宽窄成对出现,如图5所示。这样可以使得宽极和窄极产生的齿槽转矩相互抵消,会对电机的齿槽转矩产生更好的削弱效果。
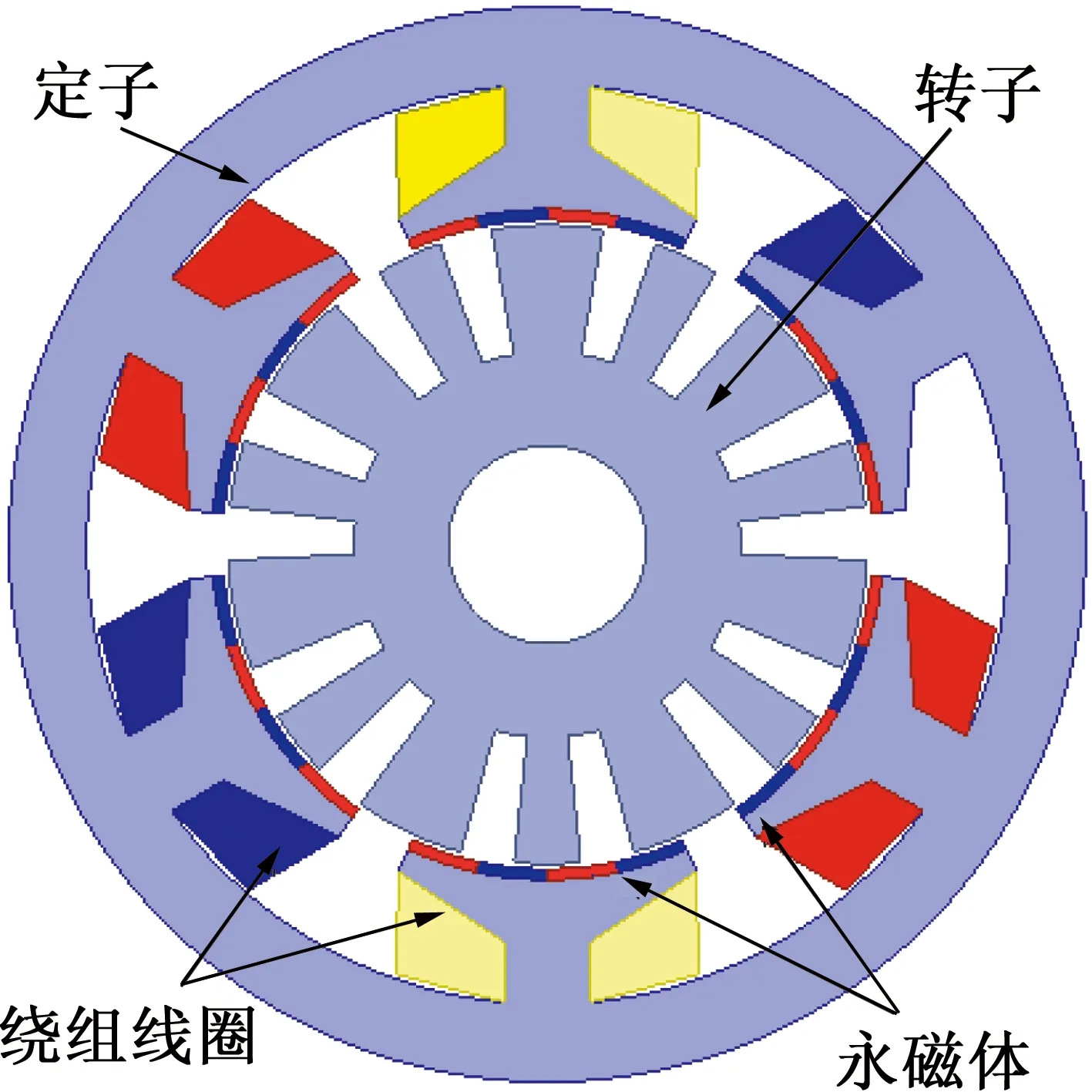
图5 6/14极内转子不等齿宽FRM结构图
通过大量的仿真实验可以得出,根据转子齿宽度β不同,电机所产生的齿槽转矩图如图6所示。从图6中可以看出,当随着转子齿的宽度β的变化,齿槽转矩的相位和幅值也随着发生变化。而且,当转子齿的宽度β为8°和20°时,此时所产生的齿槽转矩有着近似相同的形状,并且幅值近似相等。
从图6中我们可以看到,β=8°时的齿槽转矩波形与β=20°时的齿槽转矩波形是完全相反的,因此,若采用β=8°和β=20°宽窄齿成对配合时 ,齿槽转矩的大小应会明显削弱。图7的是采用β=8°和β=20°宽窄齿成对配合时电机的齿槽转矩波形,从图中可以看出,该齿槽转矩仅为等齿宽时齿槽转矩的30%。
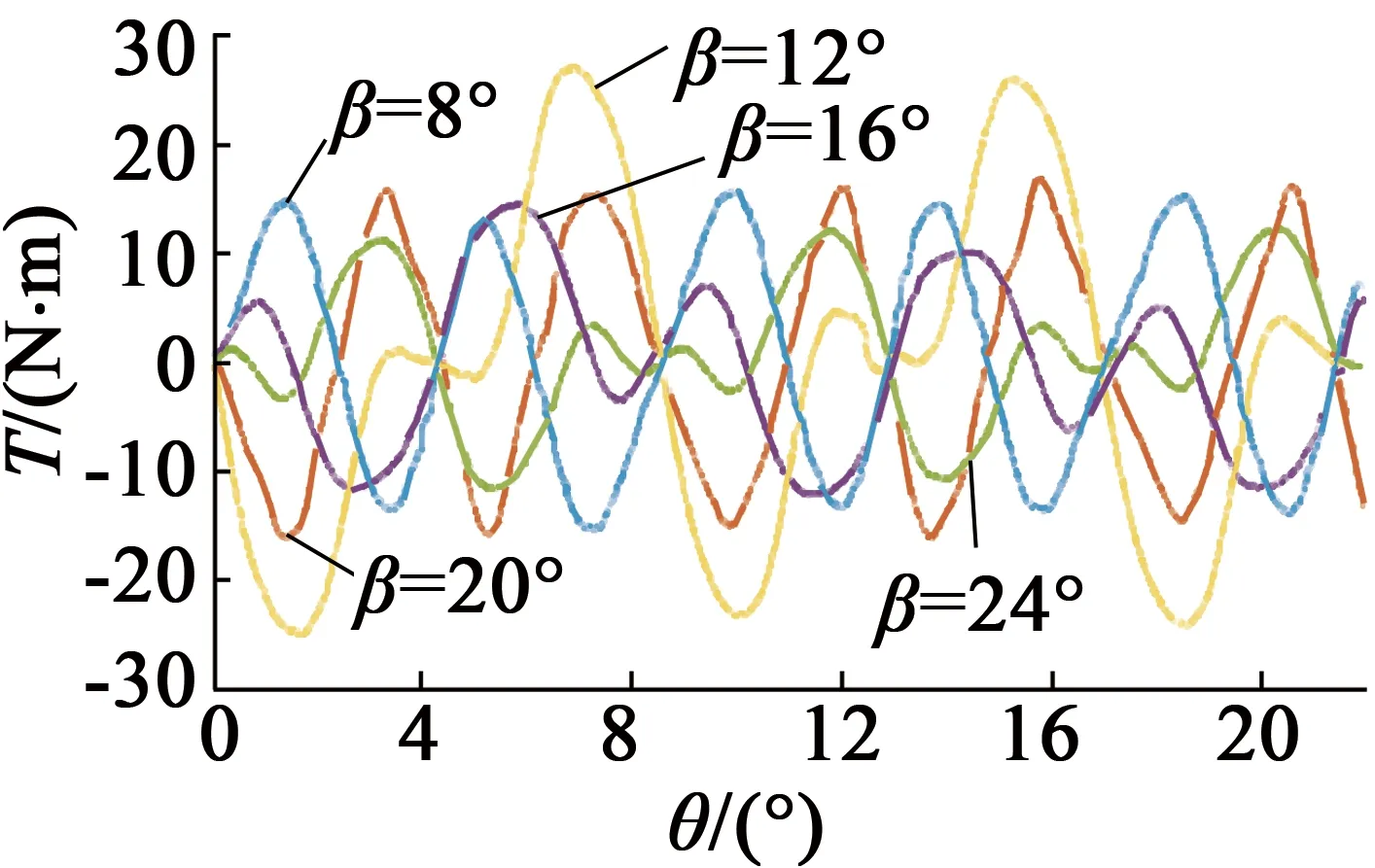
图6 转子齿宽度β变化时的齿槽转矩
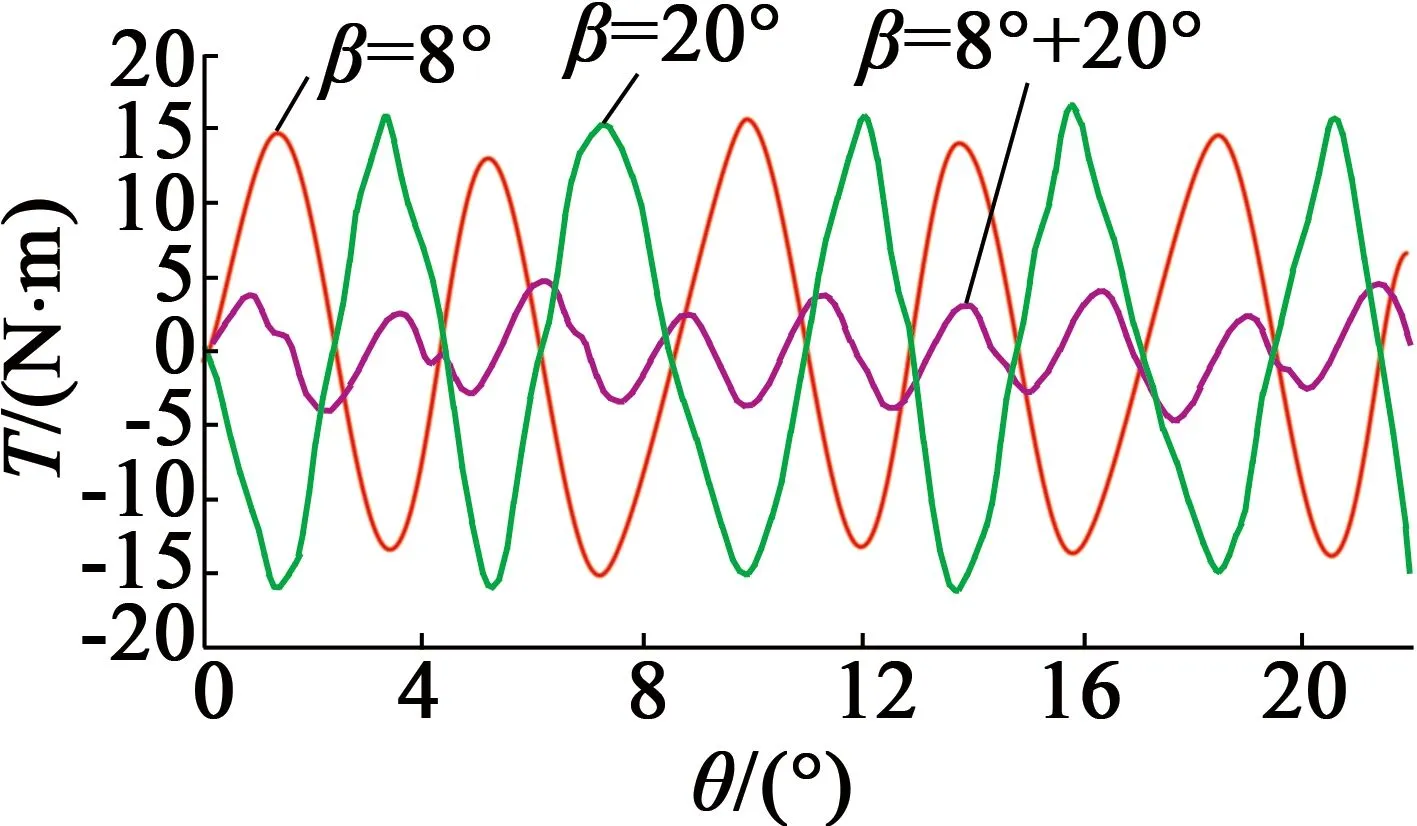
图7 转子齿宽窄成对结构时的齿槽转矩
图8显示的是三种不同的结构,即内转子、外转子和转子齿宽度为8°和20°相配合结构时的齿槽转矩对比图。

图8 内转子等齿宽、外转子等齿宽与内转子不等齿宽结构的齿槽转矩比较
根据图8所示,将三种电机同时进行比较,可以发现内转子不等齿宽时的齿槽转矩最小,本文提出的方案能够有效地削弱齿槽转矩,提高电机的性能。
3 结 语
本文通过对磁通反向式永磁电机齿槽转矩的仿真分析,发现在不改变原有样机定子结构及尺寸的前提下,改变转子结构,由原有的均匀齿改为转子极宽为8°和20°相配合的结构的方法,可以较大程度上消弱电机的齿槽转矩。同时,经过大量实验研究发现,采用本文的方法感应电势影响很小。并且该方法在制造工艺上简单易行,适于生产实际,具有广阔的应用前景。
[1] KIM T H,LEE J.A study of the design for the flux reversal machine[J].IEEE Transactions on Magnetics,2004,40(4):2053-2055.
[2] 李永斌,龚宇,江建中,等.双凸极永磁电机斜极转子设计和绕组换流模式研究[J].电工技术学报,2005,20(7):70-75.
[3] 石有计.消弱磁通反向式电机齿槽转矩的有效方法[J].电气技术,2013,(9):69-78.
[4] STATON D A,DEODHAR R P,SOONG W L,et al. Torque prediction using the flux-MMF diagram in AC,DC,and reluctance motors[J].IEEE Trans.Ind.Applicant.,1996,32(1):180-188.
[5] DEODHAR R P,STATON D A,JAHNS T M,et al.Prediction of cogging torque using the flux-MMF diagram technique[J].IEEE Trans.Ind.Applicant.,1996,32(3):569-576.
[6] DEODHAR R P,STATON D A,MILLER T J E.Modeling of skew using the flux-MMF diagram[J].IEEE Trans.Ind.Applicant.,1996,32(6):1339-1347.
Study of a Optimization Scheme of Cogging Torque of the Flux Reversal Permanent Magnet Motor
LU Dong,KANG Kai,Wu Hao
(Shandong University,Jinan 250061,China)
For the rather serious problem of the cogging torque of the flux reversal permanent magnet motor, the cogging torques of three different structures FRM were compared. The three kinds of flux reversal permanent magnet motor with different structure, namely inner rotor with same tooth width FRM, outer rotor with same tooth width FRM, and inner rotor with uneven tooth width FRM, were compared by two-dimensional finite element software. The simulation analysis shows that changing inner rotor with same tooth width FRM to inner rotor with and tooth width FRM can reduce the cogging torque in the largest extent.
flux reversal permanent magnet motor; cogging torque; rotor uneven tooth width; simulation analysis
2015-10-18
TM351
A
1004-7018(2016)03-0001-02
