天地一体化网络中无人机通信链路选择策略研究
2016-11-29吕思运
吕思运
(北京邮电大学电子工程学院,北京 海淀 100876)
天地一体化网络中无人机通信链路选择策略研究
吕思运
(北京邮电大学电子工程学院,北京 海淀100876)
本文在研究无人机通信多种信道模型和特征的基础上,提出了一种基于天地一体化网络的无人机通信链路选择策略。该策略通过分析不同飞行环境下无人机通信链路影响因素选择最佳通信链路,解释了无人机系统中不同通信链路的适用场景,并根据所提出的策略,设计了一种多无人机在近地面观测站的编队飞行方式。仿真研究了基于该策略的多无人机编队飞行时通信链路的误码率性能,以及多普勒频移、传输时延和阴影衰落等影响因素。研究结果表明无人机在长时间多场景飞行过程中,根据所提出的策略切换不同的通信链路能够将误码率保持在满足通信需求的水平。
空天地一体化;无人机;无线通信链路;动态信道仿真
本文著录格式:吕思运. 天地一体化网络中无人机通信链路选择策略研究[J]. 软件,2016,37(9):109-114
0 引言
天地一体化网络中,无人机是重要空中单位的侦察目标载体[1]。在无人机系统的众多需求中,链路系统是最重要的组成部分之一,无人机与地面站之间完全依赖无线链路进行信息的交互和控制[2]。因此,建立有效的通信信道模型并进行准确的模拟,对通信链路进行具体的规划,对于真实环境下的无人机通信系统至关重要。
无人机在飞行过程中需要实时与地面站保持通信连接,这要求通信链路不能有任何死角。但是,目前无人机通信链路应用的主要频段为微波波段,不具有绕射功能,两个微波天线之间只能视距通信。而无线信号在传播过程中会受到地形、地物以及大气等因素的影响,信道会受到来自自然和人为的多种噪声干扰。为了实现无人机在多种环境下保持通信畅通,需要合理的利用无人机配备的各种通信链路,以及多无人机组成编队的优势。
无人机通信信道模型是目前国内外研究的热点。在国外,2002年德国Haas E[3]研究了无人机近地面站信道模型随仰角的变化,2013年希腊Hatziefremidis A等人[4]研究了一种无人机近地面站起飞降落的信道模型;在国内,2013年厦门大学Shi Z[5]等研究了无人机与海上的一种信道建模方法,2014年电子科技大学杨国胜等[6]研究了多种场景下无人机的地空数据链,2013年南京航空航天大学徐仪华等[7]研究了无人机对无人机通信的一种空中信道模型,2013年复旦大学陆曦等[8]对航空卫星信道进行了相关研究。
目前在无人机通信方面主要研究单一场景下无人机与地面站、空中平台和卫星通信链路,但是,对于无人机系统来讲,其通信链路无法根据基于某种模型或算法直接得出可供实际使用的规划方案,只能根据具体的任务需求和实际通信环境在有限的链路使用状态中进行必要的配置和管理。为了在飞行场景变化而改变通信环境的情况下,无人机始终能够保持通信链路畅通,本文提出了一种根据通信信道状态选择不同通信链路的策略。并对长时间、多场景的多无人机飞行进行建模仿真,通过对误码性能、多普勒频移、时延、阴影衰落等数据的分析,验证通信链路选择策略的可行性。
1 无人机通信链路选择策略
1.1多无人机编队飞行系统结构
天地一体化网络中,无人机系统由无人机编队、地面站和通信卫星组成,如图1所示。无人机编队包括多架执行侦察或其他任务的无人机,和作为中继通信平台的小型无人机,作为簇首的侦察无人机或中继无人机通过空地信道接入地面基站网络,或通过空天信道接入通信卫星,提供无人机业务及飞行管理。地面基站除固定基站外,有时也会用到雷达车等移动地面站保持地面通信。
无人机通信信道分为三种:无人机与地面观测站直接通信的空地链路,以另一架无人机作为中继平台的空中中继链路,以及借助通信卫星作为中继平台的无人机卫星链路。
1.2无人机通信链路模型
无人机通信信道一般采用信道抽头延迟线模型。无人机和地面站一般使用高增益定向天线,链路中存在一条较强的直视信号分量。在传播过程中,直视信号会受到来自地形、地物以及大气等因素的干扰,形成多径传播。此外,微波通信还存在来自地面或海洋的反射波。因此,无人机信道通常表示为直射径、反射径和若干散射径的叠加,属于莱斯信道。无人机信道根据不同通信环境受到的影响因素不同,如多普勒频移的强度等,在不同条件下每一径的表现形式也有所差异。
地空数据链是无人机最常用的通信链路,主要影响因素是地面阴影衰落和其他各种人为噪声干扰,以及来自地面较强的反射信号[6]。无人机对地通信信道的数学模型可表示为[3,7]:

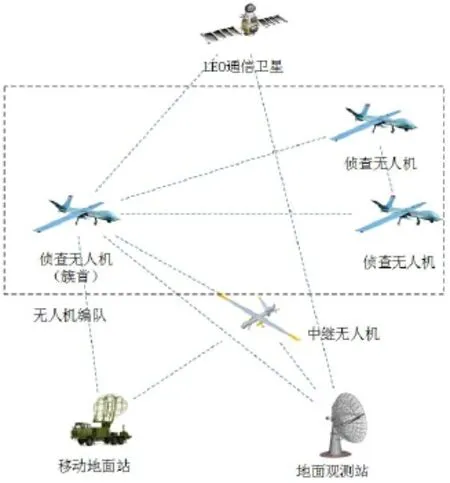
图1 天地一体化网络无人机通信系统Fig.1 UAV Communication System in the Space-Earth Integration Network
式中,dirα、refα、scaα分别为直视径分量、反射径分量和散射径分量的强度;f和τ为相应的多普勒频移和时延;θ为相应的相位差,系数1N为散射径归一化因子。
无人机编队飞行过程中,两架无人机之间的通信会应用到空中链路。与无人机对地面的静态场景信道模型相比,无人机之间存在相对运动,径向运动速度将导致接收信号产生较严重的多普勒频移。无人机机身本身存在一条强镜像反射链路,也是无人机空中链路不可忽视的因素。空中链路的优点是当无人机飞行高度较高时,来自地面的反射和散射波影响降低,多径分量的强度会降低。
当无人机B为发送端,无人机A为接收端时,将(1)中的直视路径修改为[8]:

式中,v表示无人机A相对于B的飞行速度,⊙表示向量内积。直射信号最大多普勒频移为其中v分别为收发端移动速度矢量,θ为移动方向和入射波夹角。
中高空长航时无人机通常配置卫通链路以支持其全球作战。无人机卫星通信信道需要考虑到机身反射、地面/海平面镜面反射以及地面/海平面漫反射等,可以表示为[9]:

1.3无人机通信链路选择策略设计方案
无人机空地链路系统组成要素少,成本低,以美军“猎人”无人侦察机[10]为代表的小型战术无人机通常不配备卫星通信链路,续航时间短,飞行速度较慢,飞行高度一般小于7 km。无人机空地链路主要受两方面因素限制:第一,无人机视距链路的最大距离一般在150~200 n mail(约合277~370 km)之间,超过这个距离无法与地面站保持连接;第二,无人机对地面站仰角低于10°时称为低仰角阶段,受地面阴影衰落影响较大。
对于中、高空无人机来说,飞行高度使其通信信道受大气影响较大,且距离控制地面站很远,不仅超出视距链路范围,甚至由于地球曲率的影响导致视距通信链路根本不存在,因此必须通过空中中继平台或卫星进行信号转发。此外,有时无人机虽处于视距通信范围内,但由于飞行高度较低而受到山脉、建筑遮挡时,也应选择中继通信方式。
中继通信分为空中中继通信和卫星中继通信。空中中继的优势在于,多架无人机编队飞行时,可以选择一架无人机作为簇首与地面进行通信,不同无人机之间可以根据通信状况轮流作为簇首,通信中继平台在编队内部选取,节约能源,提高通信质量,延长飞行时间。
空中中继通信的局限性,一是需要至少两架或更多的无人机平台,需要考虑多架无人机编队飞行策略,对多架无人机航路规划要求较高;二是不同类型的无人机平台传输频段、传输速率、传输数据链不同,造成通信链路复杂化;三是信号转发过程中需要重新对信号进行放大,对无人机携带能量要求提高。
卫星通信一般情况下能保证较为稳定的通信需求,但与空中中继相比,信号传输的时延更长,需要的天线增益更大,申请卫星获得通信资源比空中困难很多,成本大大提高,还存在日凌中断等太空恶劣因素的干扰。
本文提出的无人机,无人机在近地面站区域飞行时,以地空链路为主要通信方式,中继通信作为特殊情况下的补充。当无人机与地面站的相对位置超出视距范围内,将通信方式切换为中继通信,其中空中中继通信方式作为首选,当空中信道环境较差,达不到所需的通信要求,以及中继平台也超出地面视距范围时,以卫星通信作为补充。
以上为无人机通信链路选择策略的理论分析,下一节将根据具体场景进行仿真模拟,对以上通信方式的通信质量进行分析,验证所提出方案的正确性。
2 性能分析
为了验证本文提出策略的正确性,本节以两架无人机、一个地面观测站和低轨通信卫星组成的无人机系统为例,对本文提出的通信链路选择策略进行仿真验证。
本文仿真中无人机飞行轨迹为大圆轨迹,仿真场景无人机参数设置如表1所示:
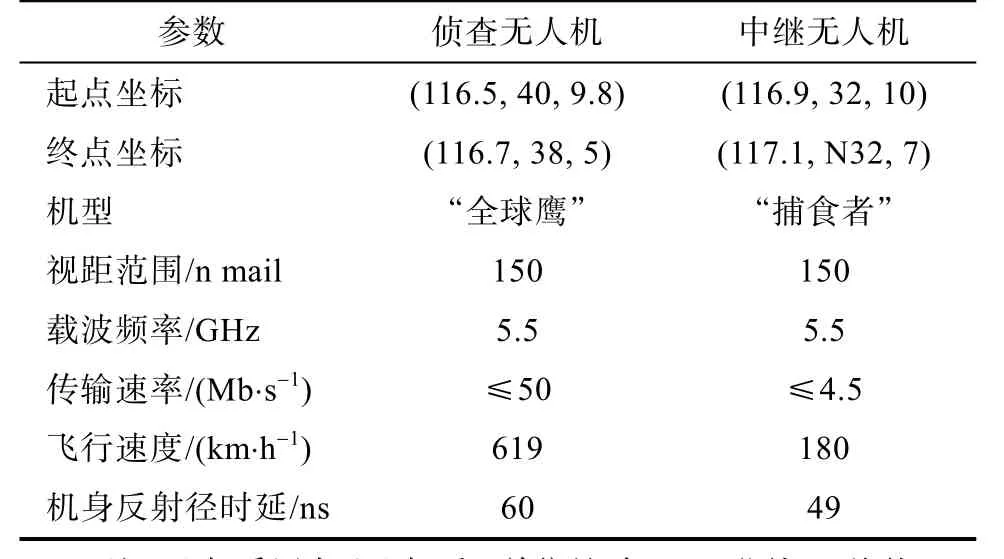
表1 双无人机系统通信链路仿真参数Tab. 1 Simulation parameters of two UAVs system communication link
此外,地面观测站坐标(E117.1°,N35.8°,0.004 km),通信卫星为距地面高度400 km。
侦察无人机起点不在地面站视距范围内,航线方向指向地面站,经过地面站上空后保持原航向飞行;中继无人机起点在侦查无人机和地面站之间,航向与侦查无人机基本相同,海拔低于侦察无人机,以便于建立中继信道。仿真飞行过程时长1.5 h,载波频率5.5 GHz,仿真点数80000点/s,调制方式采用QPSK调制,并加入信道编码[11]。
3.1误码率仿真
如图2所示,横轴为仿真时间,纵轴为误码率,每条曲线表示一种信噪比下误码率随时间的变化。从图2可以看出,随着信噪比的增大,纵坐标误码率逐渐下降。无人机空地链路,在无人机飞临地面站时误码率下降,在飞离地面站是误码率上升,与理论分析相符。其飞临地面站分为两个阶段:第一阶段(0~约30 min)无人机进入地面站视距范围,误码率下降到满足通信要求;第二阶段(约30 min~60 min),无人机进入空地通信范围后,对地面站天线的仰角逐渐减小,达到最佳通信状态,从航空信道角度来讲[12],是由途中飞行状态到飞过塔台状态的过程,弥散信道影响减弱。
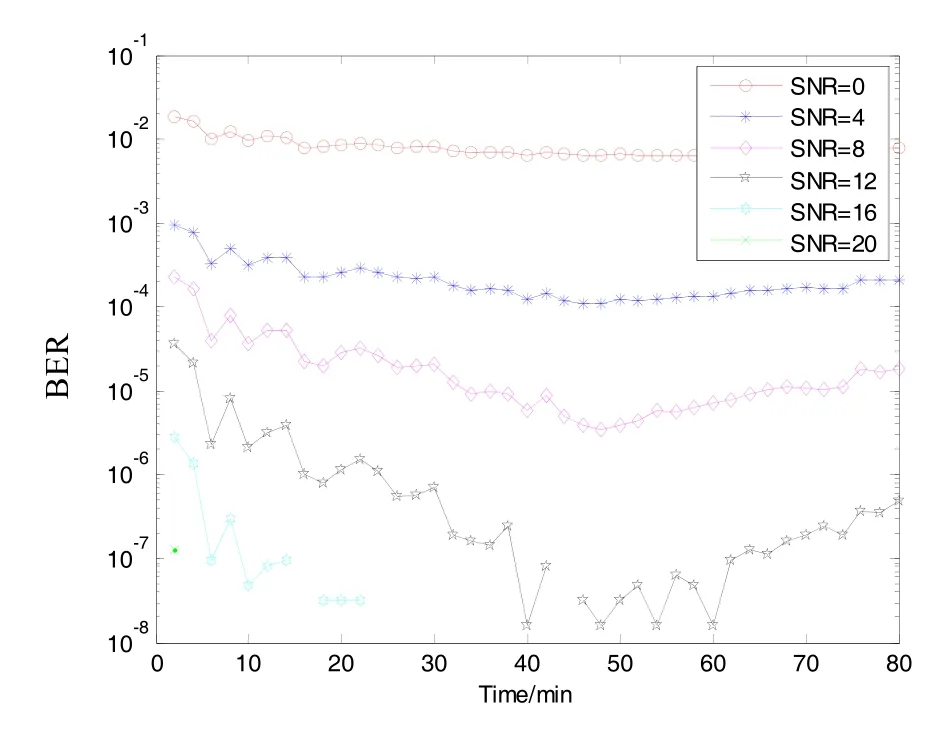
图2 无人机地空链路随时间变化的误码率Fig.2 The error rate of UAV Air-earth link changes with time
图3的数据结果显示,无人机空中中继链路,飞行开始时一段时间(约15min)后,两机距离较近,误码率保持平稳;约30~40min时,两机水平距离最小,多普勒频移减小,误码率快速降低,下降超过一个数量级,临近飞行结束阶段(70min后),中继机到地面站距离的增大,误码率上升,无法达到可正常通信要求。图3的结果说明,无人机空中中继链路在一定条件下能够为无人机系统提供相对稳定的通信。
从图4可以看出,无人机卫星链路的误码率比较稳定,不会随飞行状态的变化而产生较大的起伏,在卫星链路存在的条件下,卫星通信可以提供满足通信需求的服务。

图3 无人机空中中继链路随时间变化的误码率Fig.3 The error rate of UAV Air-relay link changes with time
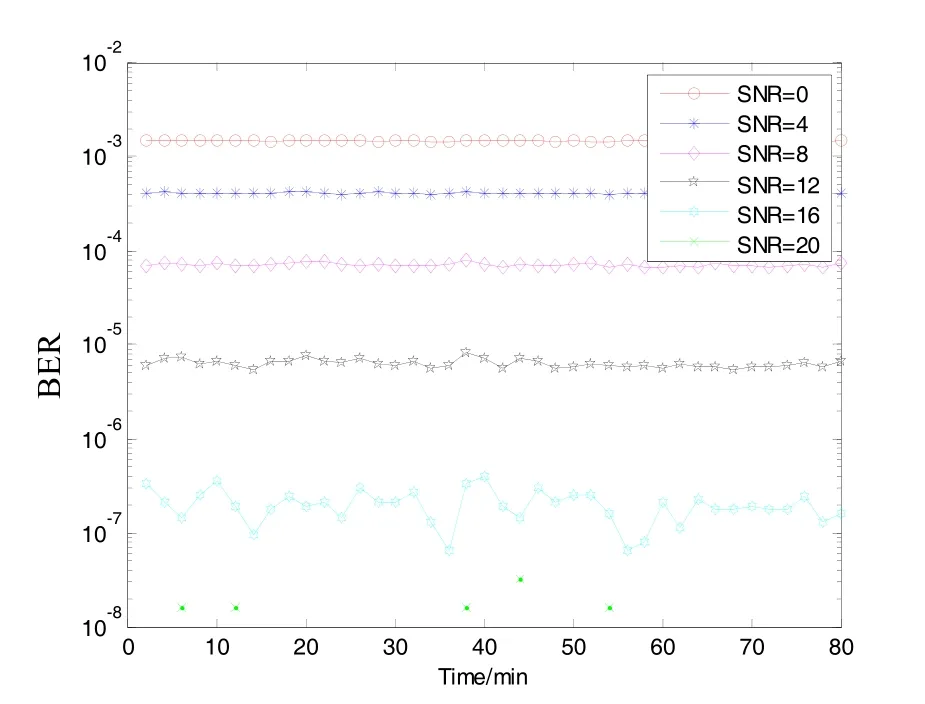
图4 无人机卫星链路随时间变化的误码率Fig.4 The error rate of UAV-satellite link changes with time
3.2通信链路选择策略误码率仿真
如图5所示,相比于空中中继链路和卫星链路,当侦察无人机在地面站视距范围内时空地链路误码率明显低于前两种通信链路。当侦察无人机超出地面站视距范围但中继无人机在地面站视距范围内时,空中中继链路的误码率与卫星通信相当,其中当两架无人机水平距离较近时空中中继链路有明显的优势,此时空中中继链路是最佳选择。当中继无人机超出地面站视距范围时,卫星通信仍能保持较低的误码率。仿真结果初步验证了上一节所提出的策略方案的可行性。
如图6所示,通信链路选择策略在大部分场景下选择了误码率最低的通信方式。当无人机空中中继链路与空地链路误码率相当时,由于空地链路受阴影衰落影响较重,误码率方差起伏较大,选择空中中继链路能够保证通信误码率的稳定性,同时避
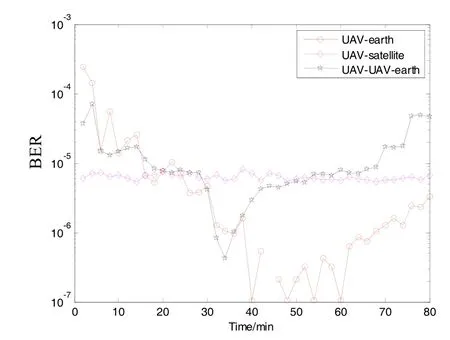
图5 同一信噪比下三种链路的误码率比较Fig.5 Comparison of three link bit error rate under the same signal to noise ratio

图6 通信链路选择策略与单一链路误码率比较Fig.6 Comparison of communication link selection strategy and single link bit error rate
3.3时延、多普勒频移、阴影衰落对误码率的影响分析
图7、图8、图9的仿真结果对信道选择策略做出了进一步的说明。免了通信链路的频繁切换。

图7 三种通信链路的时延比较Fig.7 Delay comparison of three communication modes
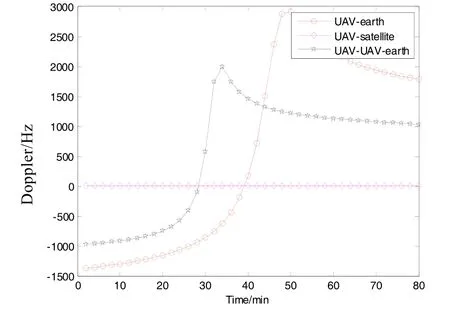
图8 三种通信链路的多普勒频移比较Fig.8 Comparison of three communication links of Doppler shift

图9 空地链路中阴影衰落对误码率的影响Fig.9 Effect of shadow fading on bit error rate inair-earth link
从图7可以看出,卫星链路的平均时延远高于其他两种通信链路,因此从时延的角度来讲,空中中继通信要优于卫星中继通信。当卫星链路误码率低于空中中继链路时,在空中中继链路误码率满足通信需求的情况下,选择空中中继链路更容易保证无人机通信的的实时性。
从图8可以看出,卫星飞行轨道较高,产生的飞行方向上的多普勒频移很小,可以忽略;中继无人机由于与目标无人机相向飞行,因此空中链路多普勒频移小于地空链路的多普勒频移,因此中继无人机的航向对是空中中继平台通信质量的重要影响因素。
图9将误码率和阴影衰落数据进行量化,绘制在一张图中比较。从图中可以看出,当阴影衰落起伏较大时,误码率的方差也比较大,阴影衰落环境的会对误码率产生不可忽视的影响。因此,当无人机与地面站直接通信时,应将空中中继通信作为补充。以上仿真结果均与提出的方案相符。
从本次仿真结果可以提出一种编队飞行方式,无人机编队在临近地面站附近时,可令飞在队首无人机作为簇首加速飞向地面站,尽早搭建空中中继链路;在飞离地面站时,处在队尾的无人机降低飞行速度,作为与地面通信的中继机,延长空中中继的通信时间。
3 结论
本文对目前已有的无人机通信链路进行了综合仿真,研究了一种无人机系统在空天地网络下长时间飞行的通信链路选择策略,通过分析无人机在不同飞行环境下的各项通信数据,得出以下结论:无人机在近地面站飞行时,应以空地链路为主要通信方式,空中中继链路为辅助链路;当无人机与地面站超出视距范围时,应以空中中继链路作为主要通信方式;当无人机配备卫星通信链路时,卫星通信链路在任何时间段均可以选择;为根据信道特征调整无人机编队与通信方式提供了一种方法。
但是,本文的研究也不尽完善,例如本文没有考虑各项数据对通信质量的影响因子大小,在今后的研究中,还需进一步完善。
[1] 毛红保, 田松, 晁爱农. 无人机任务规划[M]. 北京: 国防工业出版社, 2015.1. MAO H B, TIAN S, CHAO A N. UAV Mission Planning[M]. Beijing: National Defence Industry Press, 2015.1.
[2] 尹鲁杰. 基于Google Earth的无人机地面站的设计[J]. 软件, 2014(1): 23-25. YIN L J. Design of Control System for Unmanned Aerial Vehicle Based on Google Earth[J]. COMPUTER ENGINEERING & SOFTWARE, 2014(1): 23-25.
[3] Haas E. Aeronautical channel modeling[J]. IEEE Transactions on Vehicular Technology, 2002, 51(2): 254-264.
[4] Hatziefremidis A, Zarganis K E, Leligou H C, et al. Bit error rate analysis along a slanted path link between UAVs and Ground Stations[C]//International Conference on Transparent Optical Networks. IEEE, 2013: 1-4.
[5] Shi Z, Xia P, Gao Z, et al. Modeling of wireless channel between UAV and vessel using the FDTD method[C]//International Conference on Wireless Communications, NETWORKING and Mobile Computing. IET, 2014: 100-104.
[6] 曾俭, 景晓军, 游思晴. 平流层通信系统信道建模方法研究[J]. 新型工业化, 2011(12). ZENG J, JING X J, YOU S Q. Research on Channel Modeling of Stratospheric Communication Systems[j]. New Industrialization Straregy, 2011(12).
[7] 杨国胜. 航空信道建模与仿真[D]. 电子科技大学, 2014. YANG G S. Modeling and simulation of aviation fading channel[D]. University of Electronic Science and Technology, 2014.
[8] 徐仪华, 周生奎, 朱秋明, 等. 基于飞行轨迹的无人机通信信道仿真[J]. 电讯技术, 2013(5): 656-660. XU Y H, ZHOU S K, ZHU Q M, et al. Simulation 0f UAV Communication Channel Based on Flight Trajector[J]. Telecommunication Engineering, 2013(5): 656-660.
[9] 陆曦. 民用飞机卫星移动通信空口物理层技术研究[D].复旦大学, 2013. LU X. Research on technology of air interface physical layer of the aeronautical satellite mobile communication[D]. Fudan University, 2013
[10] 李桂花. 外军无人机数据链的发展现状与趋势[J]. 电讯技术, 2014(6): 851-856. LI G H. Status and Trend of Foreign Military Data Link[J]. Telecommunication Engineering, 2014(6): 851-856.
[11] 仲亚丽, 黄河. 一种在多径信道下LDPC码的解码设计[J].软件, 2011, 32(2): 71-74. ZHONG Y L. HUANG H. The Design of LDPC Decoder over Multipath Channels[J]. COMPUTER ENGINEERING & SOFTWARE, 2011, 32(2): 71-74.
[12] 王宁, 陈峰. 机场塔台模拟器视景构建研究与设计[J]. 软件, 2011, 32(9): 31-37. WANG N, CHEN F. The Research and Design of Visual System of Airdrome Control Tower Simulator[J]. COMPUTER ENGINEERING & SOFTWARE, 2011, 32(9): 31-37.
Research on The Selection Strategy of UAV Communication Link in The Space-Earth Integration Network
LV Si-yun
(School of electronic engineering, Beijing University of Posts and Telecommunications, Beijing 100876, China)
This paper proposes a communication link selection strategy in the earth integrated network, based on a variety of channel models and features of UAV Communication. The strategy is to select the best communication link through analyzing the influence factors of UAV communication links under different flight conditions, explain the application scenarios of different communication links in the UAV system, and propose a formation flying mode of multi-UAVs in the near surface observation station. Simulated and studied the BER performance of the communication link in multi-UAVs formation flight from this strategy, and the influence factors such as Doppler shift, transmission delay shadow fading, etc. The results show that different communication links can be switched to keep the bit-error-rate at the level of the communication requirements during long time multi-scene flight according to the proposed strategy.
Air-space-earth of integrated; UAV (Unmanned Aerial Vehicle); Wireless communication link; Dynamic channel simulation
TN911.25+4
A
10.3969/j.issn.1003-6970.2016.09.026
吕思运(1991-),男,硕士研究生,主要研究方向为卫星通信。