一种基于STM32的石化移动作业机器人研制方法*
2016-11-28柯文德陈扬鑫庄灿宇姚秋平
柯文德,陈扬鑫,庄灿宇,姚秋平
(广东石油化工学院计算机与电子信息学院,广东茂名525000)
一种基于STM32的石化移动作业机器人研制方法*
柯文德,陈扬鑫,庄灿宇,姚秋平
(广东石油化工学院计算机与电子信息学院,广东茂名525000)
研制了一种石化移动作业机器人,以STM32F103ZET6为核心控制器,搭载了红外测距模块、带编码器直流电机及驱动模块、摄像头实时传输模块、电子陀螺仪和加速度传感器等,具有自主避障、调时预定、移动模式控制等功能。机器人具有多种移动方式,能自主构建环境地图和实时监控,可通过Wireless Fidelity无线传输模块将监控视频传输到终端供决策。实验验证了设计的有效性。
石化;机器人;移动;通信
0 引言
石油化工行业的生产过程具有高温高压、易燃易爆、有毒有害等特点,在其工艺流程中会释放和产生各种有毒化学物质,对职工身体健康造成较大危害。为提高生产安全性和工作效率,在石化厂区逐步引入了智能机器人开展作业[1-2]。轮式移动机器人是在石化作业环境中较常用的机器人,主要涉及机电一体化、控制器、传感器、计算机技术、人工智能等研究领域,其应用广泛、适应性强,是当今机器人研究的热点[3-5]。许多学者对轮式移动机器人进行了研究,如文献[6]对双轮差速驱动移动式机器人的路径规划问题进行了研究,提出了融合偏差智能转化评价函数法和指数稳定控制的混合控制律,实现了移动机器人精确、稳定地跟踪直线和圆弧导引路径;文献[7]为解决非完整移动机器人的轨迹跟踪控制问题,提出了一种鲁棒自适应轨迹跟踪控制器方法,实现了非完整移动机器人的跟随误差任意小;文献[8]为解决机器人目标跟踪过程中的遮挡和外观改变等问题,提出了一种分块多特征描述子的方法;文献[9]则提出了一种轮式移动机器人混合路径规划的方法。
本研究基于轮式移动机器人思想,设计了一种石化移动作业机器人。该机器人以STM32F103ZET6作为核心控制板,采用了带编码器的直流电机来驱动机器人的左右轮,由红外避障模块来检测障碍物,内部则搭载了电子陀螺仪及加速传感器模块以实现方向保持及速度控制,并通过软件控制使其实现避障、监控及地图构建等功能。
1 硬件架构组成
当石化移动机器人的硬件材料确定后,可根据功能合理安排模块位置,并设计机器人平台底板。根据CAD软件设计底板规格尺寸,并选用4mm厚的聚丙烯板进行加工制作。机器人以STM32F103ZET6作为核心控制板,电机采用了带编码器的直流370电机,加载了L298N电机驱动模块来驱动机器人左右轮;在底盘前端加置了万向轮,便于灵活变向。机器人左前端、中间和右前端各搭载了一个红外避障模块,用于移动执行任务过程中的避障;内部搭载了电子陀螺仪及加速传感器模块,用于方向保持及速度控制。在机器人前端搭载了摄像头模块,并通过Wifi(Wireless Fidelity)模块将数据进行实时传输,便于监控石化作业环境。此外,机器人的前底部以三角形位置搭载了三个测距模块,以防机器人在特殊环境下作业发生的悬空摔损。
机器人的硬件结构如图1所示。硬件部分主要由六个模块组成,即红外测距模块、带编码器直流电机及驱动模块、摄像头实时传输模块、STM32核心板控制模块、电子陀螺仪以及蓝牙模块。
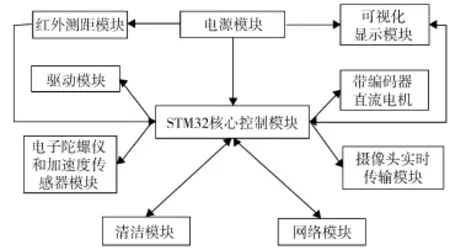
图1 石化移动机器人硬件结构
1.1红外测距模块
采用日本夏普GP2Y0A21YK0F红外测距传感器作为测距模块。该传感器根据沿直线传播和反射的性质设计而成,其工作原理是“三角测距法”,即发射器以特定角度向外发射红外光束,光束到达前方物体后将被反射回来,以CCD(Charge-coupled Device,电荷耦合元件)检测单元捕获反射回来的红外光线,从而产生某一偏移值。根据光束的发射角度、偏移值、中心距离以及CCD焦距,就可以计算出传感器到达物体的距离。
GP2Y0A21YK0F红外测距传感器的工作电源电压为4.5~5.5 V,额定消耗电流为30mA,感应测量范围为10~80 cm,以模拟量输出,在应用前需要根据传感器输出曲线对探测距离进行校正。当探测距离小于10 cm时,输出电压会迅速下降。因此,需将传感器安装在移动监控平台内且到达平台边缘的距离大于最短距离(即10 cm)。在对红外测距模块上述特性的掌握下,通过程序算法完成石化移动机器人作业过程的避障功能。
1.2 带编码器的直流电机及驱动模块
直流电机关联编码器可以实现准确测速。光线通过光栅后被接收管接收,则输出高电平;光线被遮挡,接收器无法接收,则输出低电平。因此,电机主轴旋转一圈,接收器接收到的高电平则等于码盘光栅数量。带编码器直流电机的参数1∶34指的是电机轴转动34圈,电机输出1圈。因此,1∶x表示x值越小,电机输出转速就越快,扭矩越小;反之,x值越大,则电机输出转速越慢,扭矩越大。
直流电机采用ASLONG JGA25-371减速电机334线码盘,工作电压为6~24 V,额定电压为12 V,其空载转速有977、463、201、126、95、55、41、25、19、11、8.6 r/min等类型。电机主轴转一圈输出334个脉冲,芯片上集成脉冲整形触发电路并输出矩形波。371减速电机模块是六线制的,其中有两条是电机的两极接线,有两条是编码器电源接线,还有两条是脉冲输出线,分别接编码器的两个接收管。用一根接收管可以测得电机速度,同时两根用则可以测出电机速度与转向。
2路直流电机驱动主要是通过NewWay298-M电机驱动双H桥来实现的。直流电机及驱动模块基于L298N芯片设计,集成了6路光耦控制器,其编码器可实现关闭或打开光耦隔离功能,可保护控制端不受电机的影响,并完全隔离控制端与执行端的电气联系。电机中5.08mm标准工业输入输出端口均采用旋接形式,并配置电流光耦模式开关、控制方向指示灯、上拉电阻选择接口、逻辑部分板内取电接口等。机器人可以通过电机驱动模块来驱动直流电机,并通过编码器完成行走距离的计算。
1.3 摄像头实时传输模块
为了实现对石化环境的实时监控,在移动平台上搭载了Apple iMac一体机内置摄像头。该传感器大小为76mm×8mm(长×宽),配置有随光线明暗变化的LED工作指示灯和散热硅脂外壳,其内部电路规格为50mm×8mm(长×宽),支持最大分辨率为1 280×1 024 pixel,可实现720P高清效果。传感器可通过SCCB总线控制实现8位视频流数据操作,有帧输出、子采样与取窗口、视频及图像质量、帧数据格式与传输控制等方式。
采用USR-C322a Wifi模块,其网络协议支持IPv4、TCP、UDP、DHCP、DNS、HTTP、ARP、ICMP等。TCP Serve最大TCP数为3,Wifi标准为802.11 b/g/n,网络模式为AP/Station,AP模式接入终端数量为1。频率范围为2.412~2.484 GHz,802.116,802.11g,802.11n协议下的传输速度分别为11,54,54 Mbps,传输距离为200m,安全机制为WEP-A/WPA-PSK/WPA2-PSK,加密类型为WEP64/WEP128/TKIP/AES,采用TTL串口,数据位有5,6,7,8,停止位为1,2,校验位为None,Even,Odd,Space,Mark,波特率为300 bps~3M bps。搭载摄像头模块对机器人的作业环境进行实时监控,并通过Wireless Fidelity无线传输模块将监控视频传输到终端以供决策。
1.4 STM32核心板控制模块
核心板采用正点原子STM32F103ZET6板,正点原子ALIENTEK的STM32F103控制器板载资源有:STM32F103ZET6CPU;1 MBytes SRAM,16 MBytes SPI FLASH;VS1053音频编解码模块,支持wma/MP3/FLAC/ WAV/OGG/M4A/MIDI等音频格式;DM9000网络模块,支持网络通信功能,10 M/100 M自适应,支持Web Server/TCP/UDP等,使用lwlp协议;RS232串口/RS485/CAN,USB Slave;支持UCOSIII/EMWIN/FATFS等;支持MPU6050六轴加速度创奇DMP姿态解算;支持触摸屏操作。
1.5 电子陀螺仪
采用了MPU6050型号电子陀螺仪,内部集成姿态解算器,以动态卡尔曼滤波算法实现动态环境下的当前姿态计算,允许对底层测量数据访问,并采用数字滤波技术来降低测量噪声并提高测量精度。该陀螺仪规格为15.24mm×15.24mm×2mm(长×宽×高),工作电压为3~6 V,焊盘间距为:上下2.54mm、左右15.24mm。可测量三维加速度、角速度、姿态角,特性如下:加速度量程为±16 g,分辨率为6.1e-5m/s2,稳定性为0.001m/s2;角速度量程为±11.11 πrad/s,分辨率为4.2πe-5 rad/s,稳定性为1.11πe-4 rad/s;姿态测量稳定度为5.55πe-5 rad/s。数据输出频率100 Hz(波特率为115 200)/20 Hz(波特率为9 600),数据接口为串口(TTL电平),波特率为115 200 kps/9 600 kps。通过电子陀螺仪模块采集回来的加速度、角速度、姿态角等信息量,并结合编码器,以航迹推算法完成机器人的定位与路径规划。
1.6 蓝牙模块
采用Risym cc2541低功耗4.0蓝牙串口模块,其规格大小为3.57 cm×1.52 cm(长×宽),支持标准的蓝牙BLE协议,内置iBeacon协议,支持1对多广播模式。支持Mesh组网,实现蓝牙自组网络,支持UART接口。以1.9~5.5 V单电源供电,响应速度为0.4 s,无收发字节限制,支持8位数据位、1位停止位、无奇偶校验通信格式,最高可达到3 KB/s。可实现透传、远控、PIO采集功能以及持电量检测功能。实现配对后以全双工串口方式进行工作,允许设置波特率、名称和配对密码。可以根据蓝牙模块的特性,设置好配对密码及波特率,将机器人采集到的数据返回到终端,以供外部工作人员做出下一步的指令决策。
2 软件设计
2.1 系统控制功能
机器人系统主要控制台为计算机客户端,通过无线Wifi模块让计算机与移动监控平台进行通讯,随后将采集到的环境信息反馈到客户端。在计算机客户端也能得到实时传输的视频信息已达到对环境的监控这一功能系统实时视频传输到计算机客户端,包括以下功能:(1)无线Wifi网络下的视频传输,实现机器人主控板STM32与终端设备(PC机/智能手机)通信功能;(2)机器人主控STM32平台与其主控模块之间的数据通信协议;(3)对机器人主控STM32平台的系统裁剪;(4)路径规划的有效性;(5)移动机器人的稳定性与可靠性。
2.2 工作模式
1)延边模式。当前方三个红外测距模块均未检测到障碍物时,机器人直走。当中间的红外检测到与障碍物间的距离小于程序设定的阈值时,机器人协调另外两个红外检测数值进行判断,选择合适方向以完成转弯。当左边的红外检测到与障碍物间的距离小于程序设定的阈值时,机器人右转;当右边的红外检测到与障碍物间的距离小于程序设定的阈值时,机器人左转完成避障。延边控制流程如图2所示。
2)来回模式。当前方三个红外测距模块均未检测到障碍物时,机器人直走。当中间的红外检测到与障碍物间的距离小于程序设定的阈值时,机器人协调另外两个红外的检测数值进行判断,选择合适方向转弯完成转弯。简短延时后,再转弯(与第一次转向相同),随后直接前进,直到中间红外再次检测到障碍物,再转弯(与第一次转向相反)。简短延时后,再转弯(与上一次转向相同),随后直接前进。依次类推,转向以每2次为一个周期,每个周期内的2次转弯转向相同,但每个大周期转向相反,进而完成来回模式。来回模式控制流程如图3所示。
3)螺旋模式。先记录刚开始时陀螺仪的角度,机器人首先右转,简短延时后前进,再次简短延时后右转。当陀螺仪上读出的角度在设定的范围内时,表示机器人已经完成一圈螺旋。在机器人螺旋的过程中,经过测试调整,不断增加延时的时间,进而扩大螺旋的半径,依次完成螺旋模式。
4)定点清扫模式。在小范围的区域内进行清扫。在室内定位及地图构建的技术下,对特定区域进行一个重点清扫。

图2 延边控制流程

图3 来回模式控制流程
3 实验验证
如图4所示,机器人在模拟作业过程中,能通过搭载的红外测距模块准确地判断出前方是否有障碍物的存在以及检测出障碍物的距离。当机器人左侧红外测距模块检测到有障碍物的存在时,机器人右转避障;当机器人右侧红外测距模块检测到有障碍物的存在时,机器人左转避障;当中间的红外测距模块检测到前方有障碍物时,机器人协调左右两个红外检测数值进行判断,选择合适方向转弯从而完成避障功能。因此验证了硬件框架思路的设计和避障算法的可行性。
机器人根据航迹推算法进行室内定位。机器人室内定位判断回到原点(如图5所示),并根据构建的环境、已知条件和限定条件,规划了一条满足任务要求且安全有效的路径。在室内定位和环境构建的基础上,机器人能够选择延边、来回、螺旋、定点等不同的工作模式,从而验证了工作模式实现思路的可行性。摄像头能对周围环境进行实时监测,并通过WiFi传回终端以供决策。机器人摄像头的实时监控效果如图6所示。

图4 机器人行走避障
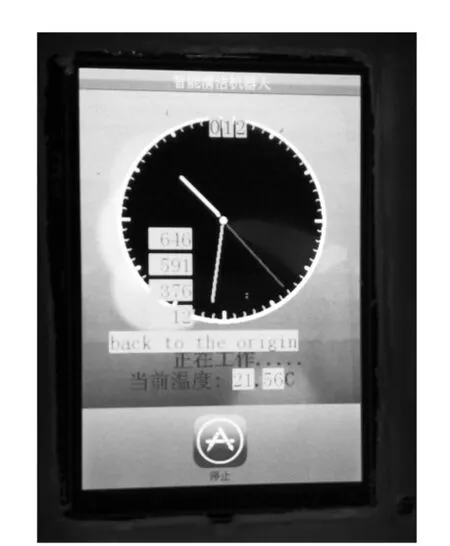
图5 判断回到原点

图6 摄像头实时监控
4 结论
以STM32F103ZET6作为核心控制板和多传感器系统,研制了一种石化移动作业机器人,在硬件环境设计及软件程序编写的基础上,对机器人的一系列问题进行了调试,其中涉及了机器人直线行走、摄像头模块供电电流稳定性、红外测距模块阈值设置、移动路径定位过程中的累积误差消除等。通过硬件设计和软件上算法的改进,最终解决了上述问题,并通过模拟实验完成了对石化移动作业机器人的可行性验证。
[1]谢在库,刘志成,王仰东.面向资源和环境的石油化工技术创新与展望[J].中国科学(化学),2014,44(9):1394-1403.
[2]谭民,王硕.机器人技术研究进展[J].自动化学报,2013,39(7):963-972.
[3]柯文德,陈珂,李家兰.一种基于A*算法的轮式机器人路径规划方法[J].广东石油化工学院学报,2012,22(1):35-38.
[4]柯文德,蔡则苏,李家兰.机器人同时定位与地图构建技术研究[J].计算机应用研究,2010,27(4):1216-1219.
[5]Cao L,Ji R.Robust Depth-Based Object Tracking From a Moving Binocular Camera[J].Signal Processing,2015,112(7):154-161.
[6]武星,朱琳军,石陈陈,等.双差速驱动移动机器人路径跟踪混合控制律研究[J].农业机械学报,2015,46(3):51-58.
[7]陈罡,高婷婷,贾庆伟,等.带有未知参数和有界干扰的移动机器人轨迹跟踪控制[J].控制理论与应用,2015,32(4):491-496.
[8]王丽佳,贾松敏,李秀智,等.分块多特征目标描述子的移动机器人目标跟踪[J].控制与决策,2016,31(2):337-342.
[9]柯文德,蔡则苏,彭志平,等.一种混合路径规划方法在轮式机器人中的应用[J].计算机应用研究,2011,28(2):505-507,531.
Design of an Operation Platform of Petrochemical Mobile Robot
KE Wende,CHEN Yangxin,ZHUANG Canyu,YAO Qiuping
(College of Computer and Electronic Information,Guangdong University of Petrochemical Technology,Maoming 525000,China)
An operation platform of petrochemicalmobile robot is designed,in which STM32F103ZET6 is taken as the core controller,coupledwith the infrared distancemeasurementmodule,coded direct-current generator and its drivenmodule,electronic gyroscope and acceleration sensor.This platform can avoid obstacles automatically,preset time and provide severalmobilemodes.The platform has several kinds of workingmodes.It can also build the environmentalmap and send back the information of petrochemical operating condition for decision through Wifi(wireless fidelity).The experiment proves the validity of the design.
Petrochemical;Robot;Mobile;Communication
TP18
A
2095-2562(2016)01-0090-05
(责任编辑:贺嫁姿)
2015-12-15;
2016-01-09
广东省科技厅产学研合作项目(2015B090903084);广东省创新强校项目(650007);广东省科技厅工业高新技术领域(2014A010104016);广东省创新强校项目(650457)
柯文德(1976—),男,广东茂名人,博士,教授,主要研究方向为人工智能、机器人技术、计算机系统结构等。