基于SIR粒子滤波和局部搜索算法的运动目标跟踪方案
2016-11-26孙新领马绍惠徐平平
孙新领, 马绍惠, 徐平平
(1.河南工学院 计算机科学与技术系,河南 新乡 453003;2.东南大学 信息科学与工程学院,江苏 南京 211189)
基于SIR粒子滤波和局部搜索算法的运动目标跟踪方案
孙新领1*, 马绍惠1, 徐平平2
(1.河南工学院 计算机科学与技术系,河南 新乡 453003;2.东南大学 信息科学与工程学院,江苏 南京 211189)
针对视频处理中的显著运动目标跟踪问题,提出一种基于序列重要性重采样(SIR)粒子滤波和局部搜索算法的运动目标跟踪方案.首先,对视频序列进行SIR粒子滤波,获得粒子的似然分布,并对粒子进行加权;然后,构建粒子的动态模型和观测模型;最后,当检测到目标运动时,根据每个时间步上观测似然的反馈信息,利用局部搜索算法自适应更新粒子的动态模型,从而实现目标的动态跟踪.实验结果表明,该方案能够有效地跟踪运动目标,且对目标背景、大小、遮挡和光照等因素具有鲁棒性.
运动目标跟踪;SIR粒子滤波;局部搜索算法;动态模型;观测模型
在计算机视觉领域中,学者已提出了多种跟踪方法[1~6]. [2]提出了一种基于颜色粒子滤波(PF)的跟踪方案.PF提供了灵活的框架,能够处理非线性和非正则系统,对背景复杂和随机指标图像序列的目标跟踪具有有效性.[3]提出了称为boost粒子滤波(BPF)的离线探测器,通过在运动领域优化传统均值漂移算法并构建背景模型,来应对不可预测和快速运动的目标.然而,这种方法需要快速探测较大搜索区域,计算量大.
序列重要性重采样(SIR)粒子滤波[7]是一种有效的估计算法,其能够有效解决非线性非高斯状态估计问题,适用于视频中的目标估计.为了解决目标跟踪中的突然运动问题,本文提出一种基于SIR粒子滤波和局部搜索算法的运动目标跟踪方案.在CAVIAR数据集中的实验结果表明,本文方案对于具有背景、尺寸、旋转、遮挡和光照变化的运动视频目标,具有较高的跟踪性能.
1 提出的跟踪方案

(1)
后验分布是一种递归贝叶斯滤波分布,可由查普曼-柯尔莫哥洛夫等式递归表示:

(2)


(3)
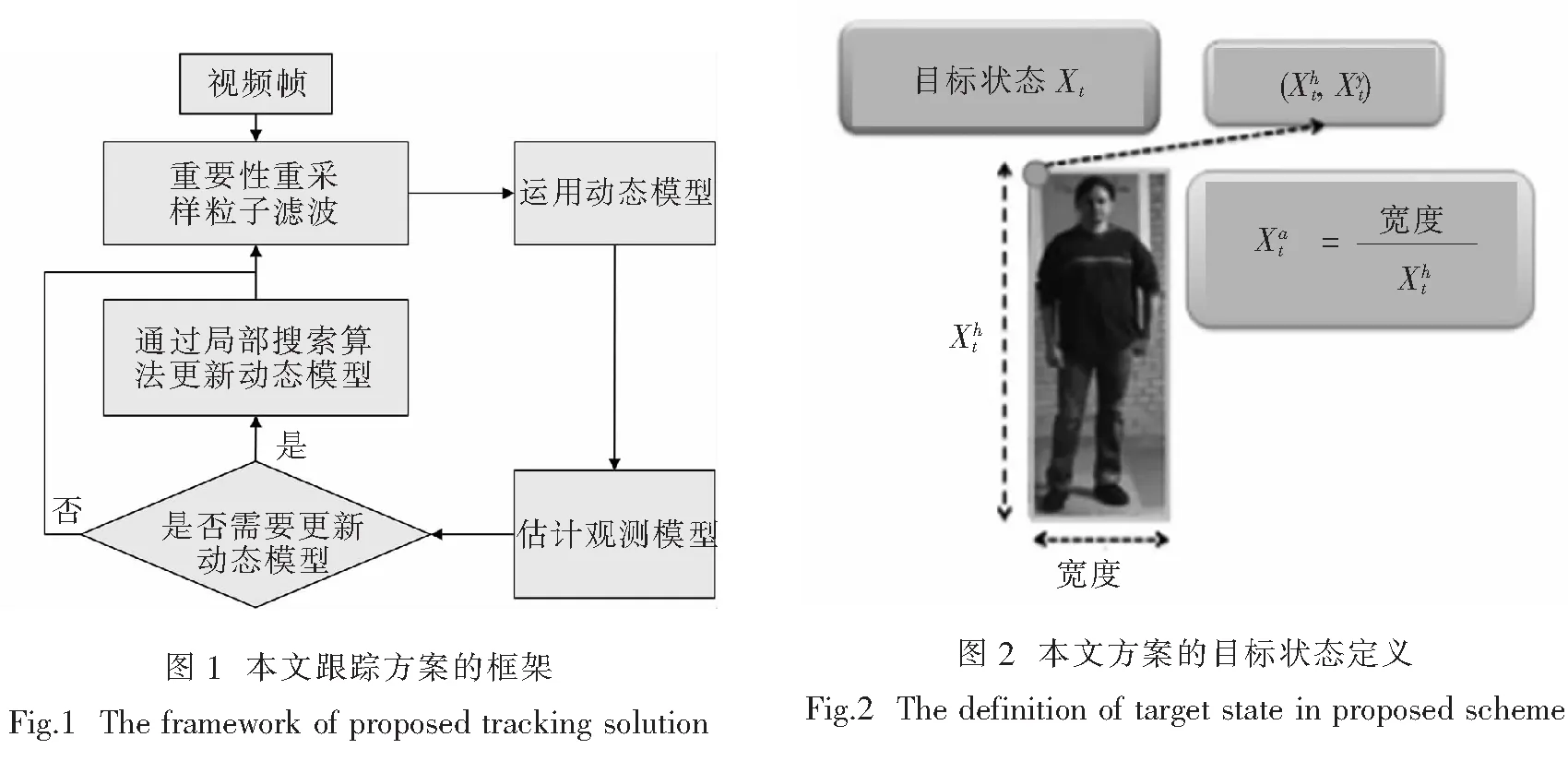
本文目标跟踪方案框架如图1所示,首先利用随机遍历抽样(SUS)方法对视频帧进行重要性重采样,然后构建动态模型,并观测目标.当检测到目标移动时,通过局部搜索算法来更新动态模型,从而实现目标的跟踪.
1.1 状态空间定义和初始化

1.2 动态模型
重要性重采样(SIR)从前一时间步的加权粒子开始执行,随着时间的推移,好的粒子将获得越来越高的权重,不好的粒子将获得越来越低的权重.本文使用随机遍历抽样(SUS)方法[9],基于它们之前的权重选择最佳粒子.

Xt=Xt-1+Vt+ε(x.y.h.a),
(4)


(5)
1.3 观测模型

(6)

1.4 基于局部搜索算法更新动态模型

(7)
提出的动态模型更新算法包括四个步骤,第一步中,由局部搜索算法更新当前时间步最佳粒子的边界框的左上角.局部搜索算法从初始解开始,执行偏移运动,以获得另一个解,如果获得的解改进了目标函数值(本例中为似然值),则接受该运动,并重复该过程,直到没有更好的可接受解时算法结束.采用的局部搜索算法运行如下:

在获得最佳跟踪器边界框时,可通过使用最佳当前和前一时间步配置,更新速度向量如下:
(8)
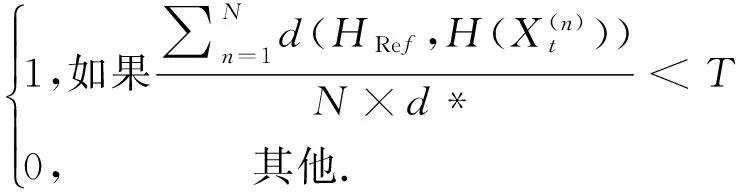
其中XBest,t和XBest,t-1分别为时间步t和t-1的最佳配置,考虑粒子配置不适合当前时间步(即粒子直方图交叉核相对于d*的平均值小于T),更新粒子集.更新过程中,在局部搜索算法中创建并调查所有粒子,根据它们的似然值将已经存在的粒子集进行排序,然后选择最佳的N个粒子作为当前时间步的一个新粒子集.
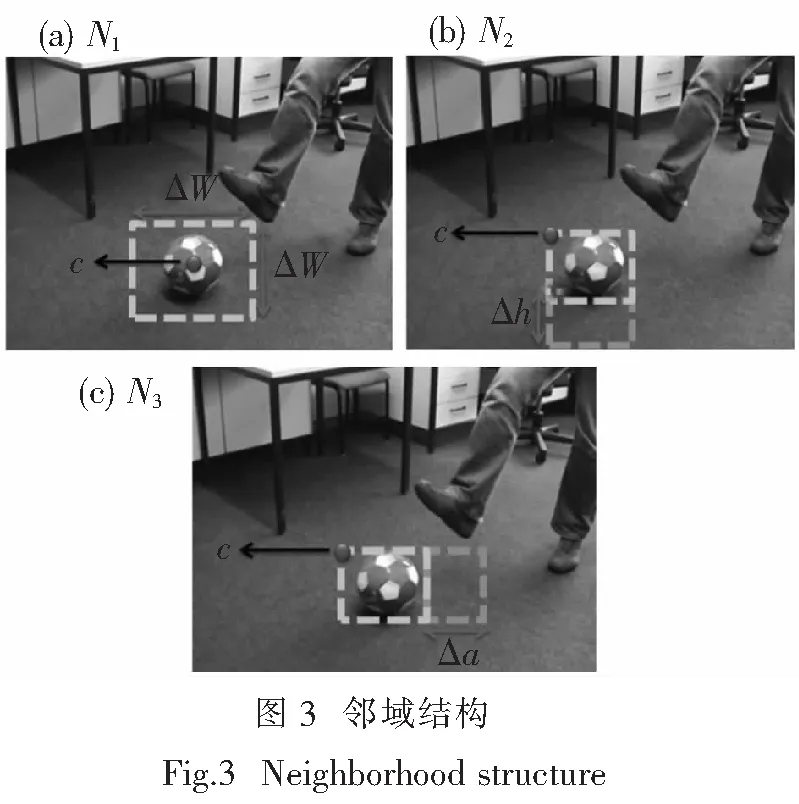
提出的跟踪器能有效处理目标的突发运动,提出的mmu函数检测目标动态模型的改变,并通过使用提出更新算法来更新动态模型.随后,执行局部搜索算法在三个邻域结构更新当前时间步中的粒子配置,即根据当前和之前时间步最佳粒子的配置,修改速度向量.基于自适应更新动态模型的跟踪方案详细步骤如算法1所示.
算法1 基于自适应更新动态模型的跟踪器
(1) 重要性采样:利用SUS方法,根据权重选择N个粒子.
2 实验及分析
在CAVIAR数据集中进行实验,将本文方案分别与[2,5,6]和 [4]的跟踪器进行比较.在9个序列上执行180个实验,获得的结果为这些实验的平均值.
2.1 性能指标

精度表示覆盖gT的部分ε占ε的比例,取值范围为0(无重叠)~1(完全重叠).一个优良的跟踪器需具有高ρ和高v值,空间匹配度量使用ρ和v来确定跟踪区域与场景中的目标区域的匹配程度,为了测量空间匹配,可以使用ρ和v的加权平均值来表示匹配度量(F-度量),F-度量定义为:

(9)
2.2 CAVIAR数据集实验

本文从分辨率为384×288的CAVIAR数据集中选取4个行人视频序列,分别为:1)WalkByShoplfront视频序列:跟踪目标为从820帧到900帧之间视频中出现的一个行人;2)OneLeaveshopReenter2cor视频序列:跟踪目标为从156帧到195帧出现一个行人目标,同时出现另一个人半遮挡情况;3)OneShopOneWaitlfront视频序列:跟踪目标为从448帧到495帧出现一个行人目标,并同时出现另外2个人,且目标旋转掉头;4)OneShopOneWait1cor视频序列:跟踪目标为从20帧到98帧之间出现的一个行人,并同时出现另外2人,在帧数45~65之间出现部分遮挡情况.
图4列举出了针对OneShopOneWait1cor视频序列,本文方案和文献方案的跟踪结果示例,其中,绿色框表示本文方案跟踪的目标.可以看出,本文方案跟踪的目标与实际目标位置的误差最小,获得了最优的跟踪性能.

表1 各种方案在CAVIAR数据集上的F-度量比较
表1给出了本文方案和其他4种方案在CAVIAR数据集中的4个视频序列上的性能参数值.可以看出,在其中3个视频序列中,本文方案都获得了最优的F-度量值.对于行人的跟踪,旋转、遮挡、形变和复杂背景是主要的挑战.在OneShopOneWaitlfront视频序列中,目标发送旋转现象,致使目标外观随时间发生变化.然而,本文方案没有更新目标外观的机制,而文献[5]的基于组件的方案能自动检测目标最具判别性的部分并快速学习其外观,所以在该视频序列中,其获得了最优性能,本文方案次之.但是,就整体跟踪性能而言,本文方案具有很大的优势,平均F-度量值达到了83.4%.
3 结束语
在视频目标跟踪过程中,目标的背景和摄像机的拍摄角度等对目标跟踪的影响较大,另外,目标的突然快速移动也是一个挑战性问题.为此,本文提出一种基于序列重要性重采样(SIR)粒子滤波和局部搜索算法的运动目标跟踪方案.利于SIR粒子滤波,获得粒子的似然分布,构建粒子的动态模型和观测模型.利用局部搜索算法自适应更新粒子的动态模型,从而实现目标的动态跟踪.在CAVIAR数据集中的实验结果表明,本文方案能够有效地跟踪运动目标,综合匹配度达到了83%以上,且对背景、大小、遮挡和光照等因素具有鲁棒性.参 考 文 献
[1] 赵喜玲, 何勇. 基于M-GCHMM步态识别研究[J]. 湘潭大学自然科学学报, 2015, 37(1):103-106.
[2] 张巧荣, 冯新扬. 利用视觉显著性和粒子滤波的运动目标跟踪[J]. 中国图象图形学报, 2013, 18(5): 515-522.
[3] WU Y, TONG X, ZHANG Y, et al. Boosted interactively distributed particle filter for automatic multi-object tracking[C]// Image Processing,15th International Conference on IEEE, 2010:1 844-1 847.
[4] ELKERDAWY S, SAYED R, ELHELW M. Real-time vehicle detection and tracking using haar-like features and compressive tracking[J]. Advances in Intelligent Systems & Computing, 2013, 36(5):381-390.
[5] FRINTROP S. General object tracking with a component-based target descriptor[C]// Proc of ICRA, 2010:4 531-4 536.
[6] ZHANG L, WU W, CHEN T, et al. Robust object tracking using semi-supervised appearance dictionary learning[J]. Pattern Recognition Letters, 2015, 62(6):17-23.
[7] 赵建东, 孙鑫, 吴龙美. 基于粒子滤波的变电站内动态目标跟踪技术[J]. 北京交通大学学报:自然科学版, 2013, 37(4):153-157.
[8] NONEJAD N. Particle Gibbs with ancestor sampling for stochastic volatility models with: heavy tails, in mean effects, leverage, serial dependence and structural breaks[J]. Studies in Nonlinear Dynamics & Econometrics, 2015, 42(5):246-257.
责任编辑:龙顺潮
Moving Object Tracking Based on SIR Particle Filter and Local Search Algorithm
SUNXin-ling1*,MAShao-hui1,XUPing-ping2
(1.Department of Computer Science and Technology, Henan Institute of Technology, Xinxiang 453003; 2.School of Information Science and Engineering, Southeast University, Nanjing 211189 China)
For the issues that the moving target tracking with significant motion in video processing, this paper proposed a moving object tracking scheme based on SIR particle filter and local search algorithm. Firstly, this scheme used SIR particle filter to process the video sequence, to obtain the likelihood distribution of particles, and the particles are weighted. Then, it constructed the dynamic model and observation model. Finally, when the target motion is detected, the local search algorithm is used to adaptively update the dynamic model of the particle according to the feedback information of observation likelihood on each time step, so as to realize the dynamic tracking of the object. Experimental results show that the proposed scheme can track the moving target effectively, and has robustness to the target background, size, occlusion and illumination.
moving object tracking; SIR particle filter; local search algorithm; dynamic model; observation model
2016-02-04
河南省高等学校重点科研项目(15A520063);河南省教育厅科学技术研究重点项目(14A520046)
孙新领(1981-),男,河南 项城人,讲师. E-mail:sunxlhnjd@126.com
TP391
A
1000-5900(2016)02-0084-05