环形一级倒立摆系统单神经元PID控制仿真
2016-11-24胡小兵刘成忠赵晓军
胡小兵,刘成忠,赵晓军
(甘肃农业大学工学院,甘肃 兰州 730070)
环形一级倒立摆系统单神经元PID控制仿真
胡小兵,刘成忠,赵晓军
(甘肃农业大学工学院,甘肃 兰州 730070)
【目的】 针对环形一级倒立摆的稳定控制问题,提出一种基于单神经元PID的控制算法.【方法】 通过拉格朗日方法推导出环形一级倒立摆系统的数学模型,设计了单神经元PID控制器,该控制器不但结构简单,而且具有良好的自适应性和鲁棒性,并采用有监督Hebb学习规则对加权系数进行修正.在Matlab中的Simulink仿真平台下,分别使用单神经元PID控制、常规PID控制和LQR控制,对环形一级倒立摆进行控制仿真.【结果】 单神经元PID控制较常规PID控制与LQR控制获得更好的控制效果,能够有效地解决环形一级倒立摆的控制问题.
环形倒立摆;单神经元PID;PID控制器;LQR控制器
倒立摆系统是一个非线性、多变量、强耦合的自然不稳定系统,它是机器人、火箭和飞行器控制等许多控制对象的理想模型,从而成为控制理论界关注的焦点[1].目前,对于倒立摆系统的研究而言,国内外更多地探索了直线倒立摆系统的控制问题.相对于直线倒立摆,环形倒立摆系统是一种典型的非线性系统,具有3个自由度,克服了行程限制,可作为检验各种控制理论更加理想的控制模型[2].
目前,对于环形一级倒立摆的稳定控制有常规PID控制[3]、LQR控制[4]、滑模变结构控制[5]、模糊控制[6]等.而单神经元PID控制结合神经网络和PID控制的优点,具有结构简单、自学习和自适应能力好、鲁棒性强等特点.为此,本研究将单神经元PID控制应用到环形一级倒立摆系统的稳定控制中,通过仿真结果表明了本方案的有效性,并将其与常规PID控制、LQR控制进行比较.
1 环形一级倒立摆系统的数学模型
在忽略空气阻力、模块之间的摩擦力及摆杆连接处质量分布不均匀等因素后,环形一级倒立摆系统可理想地简化为一个连杆、一个摆杆和一个质量块,坐标系见图1.其中,连杆的长度为l1;摆杆转动中心到杆质心的距离为l2;连杆与y轴的夹角为θ1;摆杆与垂直向上方向的夹角为θ2(顺时针为正).
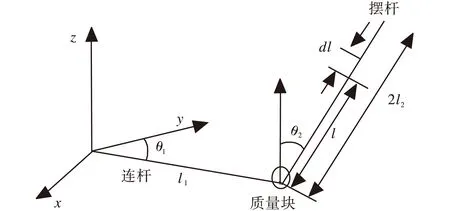
图1 环形一级倒立摆系统坐标系Fig.1 Coordinate system of rotary inverted pendulum
对于倒立摆的运动方程,主要通过两种方法进行建立与分析,分别是牛顿欧拉方法和拉格朗日方法.本研究采用拉格朗日方法得到环形一级倒立摆系统的运动方程.在图1中的摆杆上取一小段dl,该段的坐标[7]:
(1)
则该小段dl的动能:

(2)
连杆的动能:
(3)
摆杆的动能:

(4)
质量块的动能:
(5)
由以上可知系统的总动能为T=Tm1+Tm2+Tm3.
以连杆水平位置为0势能位置,则系统势能为:
V=Vm1+Vm2+Vm3=m1gl2+m2gl2(1+cosθ2)+m3gl2
(6)

(7)

(8)
上式可表示为:
(9)


(10)
式中,A、B、C分别为系统的状态矩阵、控制矩阵、输出矩阵,y为系统的输出,即:
(11)
(12)
式中,连杆长度l1=0.221m,摆杆质心到转轴的距离l2=0.197 5m,重力加速度g=9.8m/s2.
2 单神经元PID控制器设计
2.1 单神经元简介
单神经元的基本结构见图2.
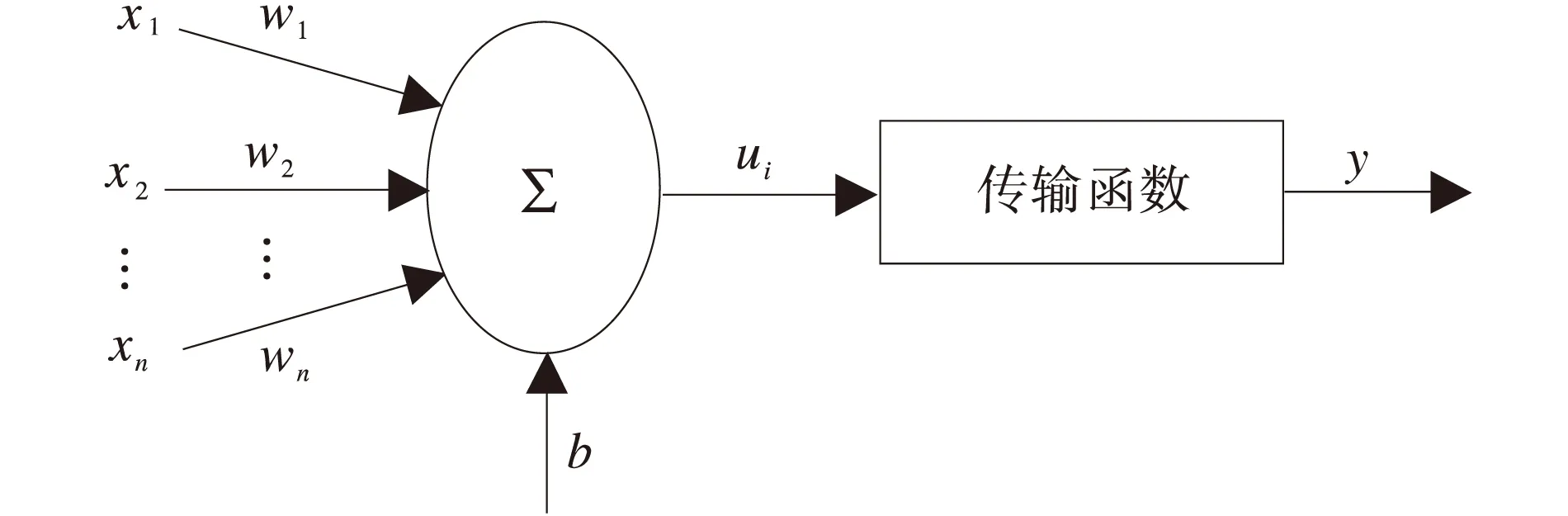
图2 单神经元基本结构Fig.2 The basic structure of single neuron
图2中,x1,x1,…,xn为神经元输入信号,对它们加以权值系数ωi后求和,然后再加上阀值b,得到u1的值,最后通过传输函数f(.)得出单神经元的输出信号y.
2.2 基于单神经元的PID控制器设计
2.2.1 单神经元PID控制系统结构 PID控制器是根据期望输出r(t)与实际输出y(t)形成偏差e(t),将偏差信号通过比例、积分及微分的线性组合形成控制量,对被控对象进行控制[8].PID控制对线性、单变量被控对象能够取得很好的控制效果,而对于非线性、多变量的环形一级倒立摆系统,表现出较差的控制性能,并且,PID控制器参数是固定不变的,无法实现自适应.
单神经元PID控制器具有自学习和自适应的能力,而且调整参数少、便于计算,能够较大地改善典型非线性时变对象的动态品质,确保控制系统运行在最佳状态,在一定程度上解决传统PID控制器参数不易在线调整的问题,有利于满足系统的实时性要求[9](图3).
图3中转换器的输入e(k)为r(k)与输出y(k)

图3 单神经元PID控制结构图Fig.3 Structure of single neuron PID controller
的偏差值,经转换器转换后得到神经元的输入量x1(k)、x2(k)、x3(k),则有:
(13)
控制器的输出:
(14)
式中,wi(k)为对应于xi(k)的加权系数;K为神经元的比例系数,且大于0.K值的选取至关重要,K值和系统的快速性有关,K越大,则快速性越好,否则,快速性会变差;同时,K大会导致超调量过大,造成系统的不稳定,当受控对象时延增大时,K值应减少,以确保系统的稳定性[10].
2.2.2 Hebb学习规则 单神经元PID控制器通过对加权系数的修正来实现自适应功能,考虑到加权系数与单神经元的输入、输出和输出偏差三者的相关函数有关,因此采用有监督的Hebb学习规则,则有:
ΔWij=η(dj(k)-oj(k))oi(k)oj(k)
(15)
式中,oi、oj分别为神经元i、j的激活值,ΔWij为神经元i和神经元j的连接权值的增量,dj为网络目标的期望输出值,η为学习效率.
为保证单神经元PID控制算法学习策略的收敛性和控制的鲁棒性,对有监督的Hebb学习规则进行规范化整理后[11],则有:
(16)
式中,ηI、ηP、ηD分别为积分、比例、微分的学习速率.对积分I、比例P和微分D分别选取不同的学习速率ηI、ηP、ηD以便对不同的权系数分别进行调整.
3 仿真试验
环形一级倒立摆系统的控制目标为产生合适的控制量u,使摆杆尽快地达到一个平衡位置,并且使之没有大的振荡和过大的角度、速度.另外,当摆杆到达预期的位置后,系统能够克服随机干扰而保持稳定状态.为了实现控制目标,采用两个单神经元PID控制器,分别对连杆转角θ1和摆杆转角θ2进行控制.环形一级倒立摆的单神经元PID控制系统结构(图4).
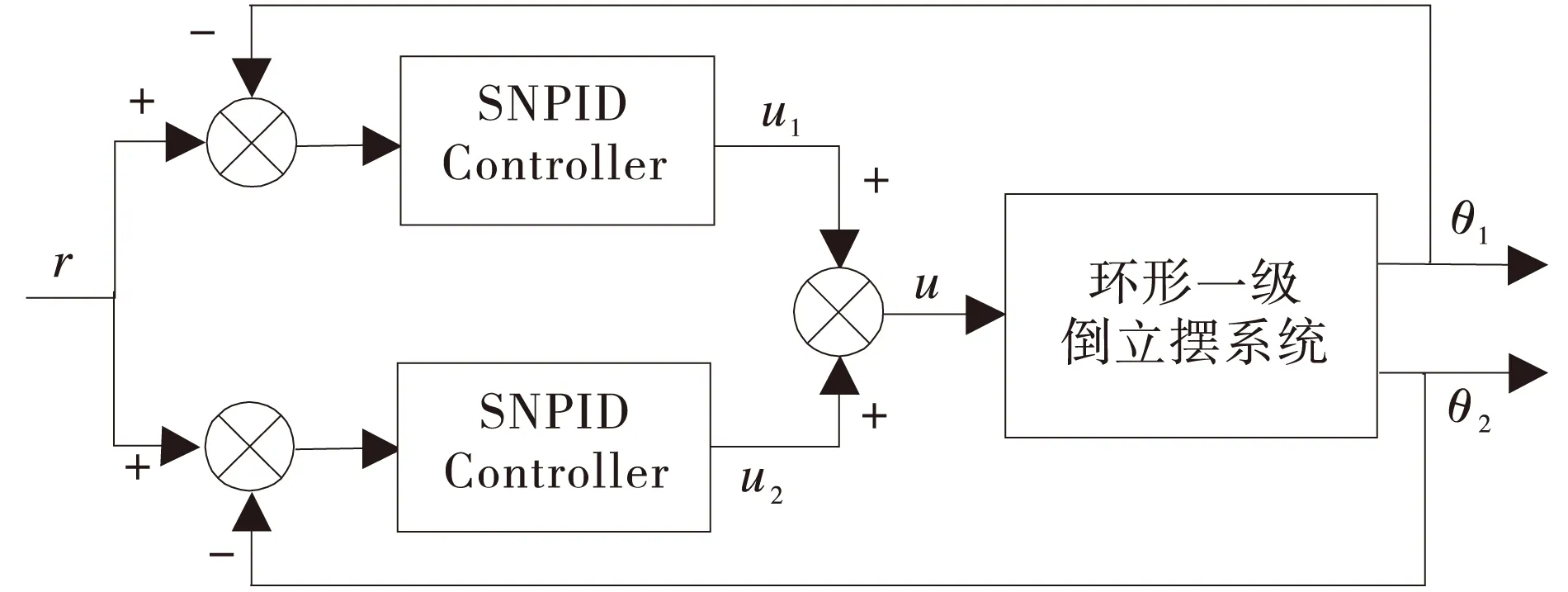
图4 环形一级倒立摆控制系统结构图Fig.4 Inverted pendulum control system structure diagram
图4中,系统输入r为0输入响应信号;环形一级倒立摆系统采用状态空间方程,见式(11)、式(12),并设初始状态:x0=[0.1,0,0.1,0],即θ1=θ2=0.1 rad;SNPID Controller为单神经元PID控制器,具体结构见图5.

图5 SNPID模块框图Fig.5 SNPID module diagram
图5中,S-Function模块采用S函数实现了有监督Hebb学习算法,该模块的输入信号为e(k)、e(k-1)、e(k-2)、u(k-1),输入信号为u(k).为使单神经元PID控制器更接近实际使用,在控制量u(k)后连接饱和非线性模块Saturation,它的取值区间为[-10,10].
根据上述3种控制方法,在Matlab软件的Simulink平台下,对环形一级倒立摆系统进行仿真,其结果见图6-7.

图6 3种控制方法的连杆角度仿真图Fig.6 The simulation graph of the single neuron PID control
图7 3种控制方法的摆杆角度仿真图Fig.7 The simulation diagram of LQR control
由图6可知,对于连杆角度的控制,在响应速度、调节时间两方面,单神经元PID控制均表现为最优.PID控制与LQR控制相比,PID控制具有较快的响应速度,两者的超调量与调节时间相近.
由图7可知,在摆杆角度的控制问题上,除了超调量之外,单神经元PID控制具有良好的控制效果.而LQR控制具有最小的超调量,但在响应速度和调节时间这两方面均表现的较差,同样,PID控制在这两方面与之接近,且具有过大的超调量.
4 结论
本研究通过分析环形一级倒立摆系统,进行了数学建模.由于单神经元PID控制器是在常规PID控制的基础上,结合了神经元的自学习、自适应的功能,具有结构简单、实时性能好,鲁棒性强等优点,因此,将其引入到对环形一级倒立摆的稳定控制中.仿真结果表明,单神经元PID控制对倒立摆系统的连杆角度和摆杆角度获得良好的控制效果,且均优于PID控制、LQR控制.
[1] 桑英军,范媛媛,徐才千.单级倒立摆控制方法研究[J].控制工程,2010,17(6):743-745
[2] 王东亮,刘斌,张曾科.环形一级倒立摆摆起及稳定控制研究[J].微计算机信息,2007,23(4):1-2
[3] 汪雨寒,夏洪浩,杨思亚.简易旋转倒立摆及控制装置的系统设计[J].大学物理实验,2014,27(1):37-39
[4] 徐泽远.简易旋转倒立摆及控制装置的设计[J].安徽农业科学,2014,42(26):9216-9217
[5] 王招治.基于MATLAB的旋转倒立摆的控制与仿真分析[J].机电技术,2012,35(4):36-39
[6] 李保林,吕跃,袁浩.一级旋转倒立摆的模糊控制[J].实验室科学,2008(5):77-79
[7] 刘浩梅,张昌凡.基于LQR的环形单级倒立摆稳定控制及实现[J].中南大学学报:自然科学版,2012,43(9):3496-3500
[8] 魏凯,安进强,贾晔,等.基于ZigBee技术的恒压灌溉系统研究[J].甘肃农业大学学报,2013,48(5):146-150
[9] 陈斌,杨宏祯,王立文.飞机除冰液加热系统单神经元PID控制仿真[J].计算机工程,2012,38(6):241-243
[10] 徐国华,李祖佳,贺磊,等.单神经元PID在绞车控制系统中的应用[J].控制工程,2013,20(1):42-45
[11] 李俊丽,何勇,王生泽.单神经元PID在多电机同步控制中的应用[J].机电工程,2010,27(8):14-18
(责任编辑 赵晓倩)
Neuron PID control simulation of rotary single inverted pendulum system
HU Xiao-bing,LIU Cheng-zhong,ZHAO Xiao-jun
(College of Engineering,Gansu Agricultural University,Lanzhou 730070,China)
【Objective】 Aimed at the stable control problem of single link rotary inverted pendulum,a control algorithm was put forward based on single neuron PID.【Method】 The mathematical model derived by the Lagrange method of system for single link rotary inverted pendulum,designing the single neuron PID controller,the controller not only had simple structure,but also had good adaptability and robustness,and the weighted coefficients was carried out by the supervised Hebb learning rule.In the Simulink simulation platform in Matlab,the single neuron PID control and conventional PID control and LQR control was used respectively to simulate the single link rotary inverted pendulum.【Result】 The results showed that the single neuron PID control had better control effect compared with the conventional PID control and LQR control,can effectively solve the control problem of single link rotary inverted pendulum.
rotary inverted pendulum;single neuron PID;PID controller;LQR controller
胡小兵(1989-),男,硕士研究生,研究方向为农业物联网、智能控制理论与应用.E-mail:mikehubing@163.com
刘成忠,男,副教授,研究生导师,研究方向为智能决策支持系统.E-mail:liucz@gsau.edu.cn
甘肃省自然科学基金资助项目(1208RJZA133);甘肃省干旱生境作物学重点实验室开放基金资助项目(GSCS-2012-15);甘肃农业大学青年导师基金资助项目(GAU-QNDS-201309).
2015-01-07;
2015-04-28
TP 391
A
1003-4315(2016)05-0132-05
