融合遮挡感知的在线Boosting跟踪算法
2016-11-24王亚文陈鸿昶李邵梅高超
王亚文,陈鸿昶,李邵梅,高超
(国家数字交换系统工程技术研究中心,河南 郑州 450002)
融合遮挡感知的在线Boosting跟踪算法
王亚文,陈鸿昶,李邵梅,高超
(国家数字交换系统工程技术研究中心,河南 郑州 450002)
提出融合遮挡感知的在线Boosting跟踪算法,该算法对跟踪结果实时进行遮挡检测,根据检测结果自适应调整分类器更新策略。该方式能够有效维护分类器特征池的纯净,提高算法在遮挡环境下的顽健性。实验结果表明,与传统的在线Boosting跟踪算法相比,改进的算法能有效解决目标遮挡问题。
在线Boosting;遮挡感知;ORB特征;目标跟踪
1 引言
目标跟踪的目的是在图像序列中实时提取兴趣目标的运动轨迹[1]。目标跟踪在行为分析、智能监控、交通监管等领域都扮演着重要的角色。目标跟踪作为计算机视觉领域的研究热点,近年来有了较大的发展,但同时仍然面临着复杂背景、遮挡、目标形变等许多挑战。
为了适应跟踪过程中目标外观的变化,研究人员提出了一系列的在线学习跟踪算法,主要有基于向量子空间学习的跟踪算法、基于稀疏子空间学习的跟踪算法以及基于分类器学习的跟踪算法等[2]。基于分类器学习的跟踪算法主要包括基于SVM分类器的跟踪算法[3]和基于Boosting分类器的跟踪算法[4]。由于基于Boosting分类器的跟踪算法具有对训练数据需求量小、实时性更好的优点,所以研究更为广泛。
Grabner[4]最先将Boosting算法应用到目标跟踪中,该方法首先从特征池中挑选训练误差最小的特征,然后利用它们训练弱分类器,并按照各自的权重线性组合成强分类器来进行目标跟踪。跟踪过程中,不断根据跟踪结果采集正负样本来更新Boosting分类器以适应目标外观变化。该算法的优点在于其较强的适应能力,能够有效跟踪外观不断变化的目标。但是该算法在进行模型更新过程中,对跟踪结果高度依赖,如果跟踪结果发生偏差,如目标受到遮挡,那么目标区域会包含背景信息,并且这些背景信息会被当成正样本,用于对目标外观模型进行更新,从而污染分类器特征池,影响后续跟踪。为了解决此问题,文献[5]提出基于离线Boosting分类器和在线Boosting分类器融合的跟踪算法,通过给离线分类器和在线分类器分配合理的权重来平衡算法的适应性和抗遮挡性,但是该算法对权重的选择缺乏理论指导。文献[6]将分块跟踪[7]的思想引入到在线Boosting跟踪算法中来解决遮挡问题。该方法将目标分成多个子区域,对每个子区域分别利用在线Boosting算法进行跟踪评价。该算法的缺点在于子区域的划分会降低分类器特征池中特征的数量,影响分类器性能。文献[8]引入非线性递归最小二乘法来构建自适应非线性弱分类器,然后利用Boosting算法将弱分类器加权组合成强分类器进行跟踪。文献[9]提出MKB(multiple kernel Boosting)跟踪算法,该算法构建一组SVM分类器,每个分类器对应不同的核函数和特征,并将每一个SVM分类器作为一个弱分类器,然后利用Boosting算法将所有弱分类器加权组合成强分类器,用于目标跟踪。文献[10]将半监督学习引入到Boosting框架中来改善更新机制,该方法仅对第一帧样本进行标记,并用有标记的样本对新采样得到的样本进行监督,一定程度上缓解了漂移问题,但随着跟踪过程中目标外观的变化,监督机制将逐渐失去作用。文献[11]提出一种协同训练框架来提高Boosting分类器性能,但该框架至少需要2个Boosting分类器才能生效。文献[12]提出一种多实例学习跟踪算法,该方法用样本包的形式代替了单个样本进行标记,提高了样本标记的质量,但在遮挡环境下,该算法依然存在跟踪漂移的问题。
针对目标受到遮挡时,在线Boosting跟踪算法顽健性差的问题,本文提出一种融合遮挡感知的在线Boosting跟踪算法,有效感知跟踪过程中可能发生的遮挡,从而自适应调整分类器的更新策略,提高算法在遮挡环境下的顽健性。
2 遮挡感知器
为了提高在线Boosting跟踪算法在遮挡环境下的顽健性,一个合理的思路是引入遮挡感知机制,在未感知到遮挡时,采集目标区域的正样本进行分类器更新;在感知到遮挡后,自适应调整分类器更新策略,暂不进行基于正样本的分类器更新。
本节将从遮挡感知方法、局部特征选择、模糊特征过滤以及感知器更新4个方面进行介绍。
2.1 遮挡感知方法
如图1所示,遮挡物对目标进行遮挡是一个时变的过程,假设在第k帧,遮挡物即将遮挡目标,遮挡物一般会先出现在背景域RB(图 1中白框以内,黑框以外的回形区域),然后出现在目标域RT(图 1中黑框以内的区域)。遮挡感知的具体实现是通过记忆特定帧数中(如图1中的m)背景域出现的局部特征,形成感知特征池 PB。

其中,||⋅||表示特征集合中特征数量,λO表示遮挡判决阈值,其设置规则如4.2节所述。如果感知出目标受到遮挡,则不采集受污染的正样本来更新分类器。
本文提出的遮挡感知方法是建立在局部特征匹配基础之上,因此,选择合适的局部特征是一个关键问题,下面将介绍局部特征选择依据。
2.2 局部特征选择
目前,应用最广泛的局部特征是 SIFT及其各种变换特征,如SURF、PCA-SIFT等。但是这些特征普遍具有处理速度慢的特点,难以满足本文实时处理的需求。综合处理精度和速度,本文采用Rublee[13]提出的ORB算法,它改进了FAST角点和BRIEF描述子无方向性的缺点,提出了方向oFAST角点和旋转BRIEF描述子并将其结合,使特征具备了旋转不变性[14]。更值得关注的是,由于旋转BRIEF是一种二值描述方法,因此基于ORB特征进行相似性匹配时,用汉明距离代替了SIFT特征匹配中的欧式距离,从而大大减少了匹配时间。因此本文以ORB局部特征为基础,构建遮挡感知器。
2.3 基于双分类器判决的模糊特征过滤
目标区域和背景区域可能存在颜色、纹理相近的局部区域,如图2所示,目标域(图2中黑框以内的区域)中的R1区域与背景域(图2中白框以内,黑框以外的回形区域)中的R2区域外观近似,因此在利用2.1节内容进行遮挡感知的时候,会造成遮挡误判。本文将这种存在于背景中且与目标外观高度相似的局部特征定义为模糊特征[15](ambiguous feature),用Fambiguous表示。模糊特征不仅自身不具有对目标与背景的区分能力,并且会在目标特征集合和背景特征集合之间构建过渡桥梁来弱化和之间的区分性,如式(4)。

其中,符号“~”表示匹配关系。
为了避免这类模糊特征对遮挡感知的影响,本文提出基于双分类器判决的模糊特征过滤方法。该方法需要增加一个与背景特征分类器CB相对的目标特征分类器CT。初始化时,它们分别由首帧中的目标区域和背景区域的 ORB特征训练得到。后续根据各帧的跟踪结果,不断进行特征池更新。
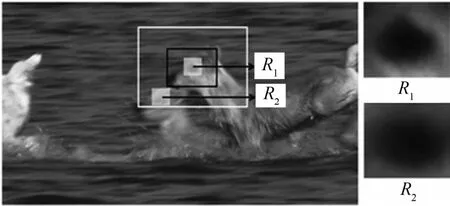
图2 模糊特征说明
利用双分类器进行模糊特征过滤,对于新获得的目标域特征集合

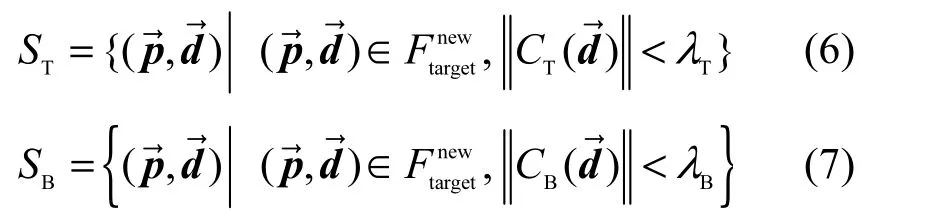
其中,λT表示分类器CT的判决门限,表示能被分类器CT接受的最大汉明距离;λB表示分类器CB的判决门限,表示能被分类器CB接受的最大汉明距离。本文将λT和λB均设为45,这样那些既属于ST又属于SB的特征就是模糊特征,然后通过过滤模糊特征的方式来对临时特征集合提纯,获得遮挡特征集合FO。

其中,“”符号表示差集。最后根据式(3)进行遮挡判决。
2.4 遮挡感知器的更新
为了提高遮挡感知器的适应能力,感知器需要不断更新,即丰富分类器CT和CB的特征池,因此,在每帧图像完成遮挡感知后,需要对CT和CB的特征池进行更新。


理论上,为了保证遮挡感知的效果,感知器记忆的特征越多越好,但是受存储空间和算法效率的约束,遮挡感知器记忆的ORB特征不可能无限制地增长,因此就需要限定遮挡感知器的记忆容量为l。这样,分类器CT和CB的更新方式如式(11)、式(12)。

很明显,记忆容量的限定在一定程度上会影响遮挡感知器的判决准确度。如假设分类器只有 10帧的记忆,那么当遮挡持续 10帧之后,背景分类器CB中能有效区分遮挡的特征就会逐渐被遗忘,随着时间的推移,遮挡感知器将失去对遮挡情况的正确感知,从而跟踪器再次面临漂移问题。实验部分将会详细分析遮挡感知器的记忆容量对于算法性能的影响,并给出其设置依据。
整个遮挡感知器的结构如图3所示。
3 遮挡感知器与跟踪器融合
本文提出了一种遮挡感知方法,利用该方法来监督在线Boosting跟踪算法中分类器的更新机制,避免采集受污染的正样本对分类器进行错误的更新,保证Boosting分类器特征池的纯净,从根本上解决在线Boosting跟踪算法面对目标遮挡时产生的漂移问题。
改进的算法分别构建遮挡感知器和跟踪器,针对每帧图像,将跟踪器的跟踪结果作为感知区域,并利用遮挡感知器对区域图像进行检测,根据返回的遮挡感知结果监督跟踪器的更新。改进的算法步骤如算法1所示。
算法1 改进的跟踪算法
target=人为标记要跟踪的目标;
对在线Boosting分类器进行初始化;
对目标特征分类器CT和背景特征分类器CB初始化;
while 获得一帧新的图像do
sample[ ]=采集样本;
target=Boosting(sample[ ]);
F[ ]=从target中提取ORB特征;
CT和CB对 F[ ]分类并过滤模糊特征得到FO[];

只采集负样本更新Boosting分类器;

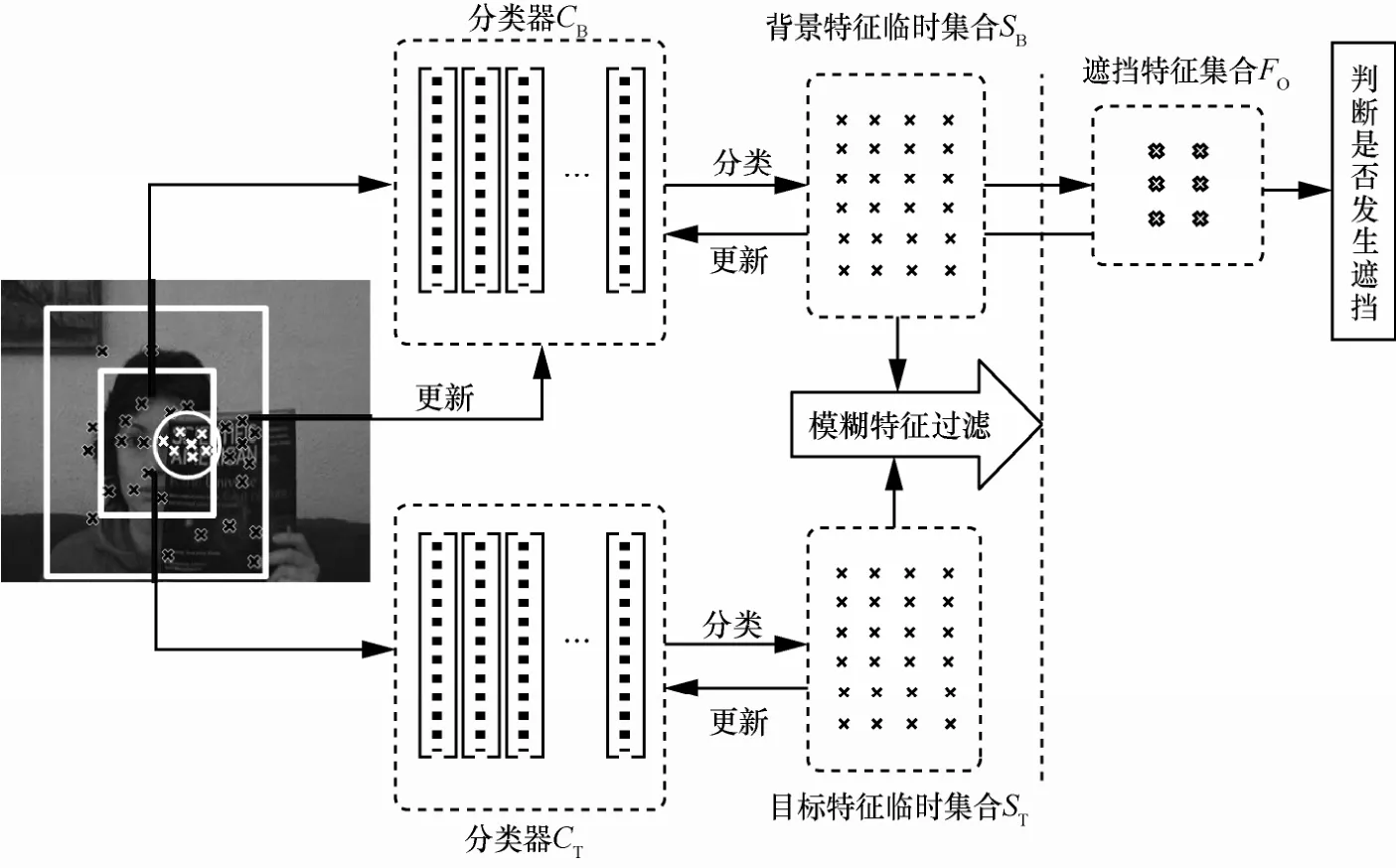
图3 遮挡感知器结构
采集正负样本更新Boosting分类器;
end
更新遮挡感知器;
end
遮挡感知器与跟踪器是相互依赖的关系,遮挡感知域的构建依赖跟踪器的跟踪结果,而同时跟踪器的更新策略依赖于遮挡感知器的遮挡检测结果。并且遮挡感知器与跟踪器也是相互促进的关系,有效的遮挡感知能优化分类器的更新策略,提高跟踪器的跟踪精度,而同时准确的目标定位又会帮助遮挡感知器构建准确的感知域,保证遮挡感知器的有效应用。
4 实验结果及分析
因为本文的核心思想是对在线Boosting跟踪算法引入遮挡感知机制以提高其在遮挡环境下的顽健性,所以实验部分首先对遮挡感知器进行性能测试,其中包括遮挡漏检率和误检率的统计、记忆容量的确定;随后挑选了传统在线Boosting跟踪算法[4](OAB)、半监督 Boosting跟踪算法[10](SBT)、多实例学习跟踪算法[12](MIL)以及一种静态抗遮挡跟踪算法[7](Frag)进行遮挡环境下的跟踪对比实验,评估本文算法面对遮挡问题的顽健性;最后利用12幅图片序列对本文算法与文献[16]中提到的 10种现阶段著名跟踪算法进行综合性能对比,并深入分析本文算法的适应性。实验中用到的标准测试序列来源于文献[16]。
4.1 实验参数
1) Boosting算法参数
参考已有的在线Boosting跟踪算法,选择器数量为30,每个选择器包含的弱分类器个数为100,采样区域覆盖率为0.95,搜索系数为2。
2) ORB算法参数
ORB算法中基于 oFAST角点检测来定位兴趣点,为了能使 oFAST算法在跟踪窗口中检测出尽可能多的角点,本文采用FAST-9进行角点检测,其原理是对每一个候选点周围的16个像素点进行检测,如果存在连续9个像素点比候选点像素值加上数值T后(T为任意整数)还大或是比候选点像素值减去数值T后还小,则该候选点就是角点,参数T设为25。
3) 实验环境
电脑配置为3.2 GHz CPU,7.86 GB内存,实验平台为VS2010。
4.2 遮挡感知器性能测试
本节实验利用标准测试序列 faceOcc1和faceOcc2来测试遮挡感知器性能,其方法是利用已标记好的真实目标区域构建感知区域,利用不同的遮挡阈值λO来测试遮挡感知器的效果。统计在不同遮挡阈值条件下,遮挡感知器的漏检率(目标区域实际受到遮挡,但未触发遮挡感知器)和误检率(目标区域实际未受遮挡,但触发了遮挡感知器),其结果如表1所示。
从表1结果来看,对于序列faceOcc1,当遮挡阈值λO定为50时,其感知结果较为理想,对于序列faceOcc2,当遮挡阈值λO定为35时,其感知结果较为理想。但是本节实验是利用标记好的真实跟踪区域来测试,实际跟踪中,由于窗口与目标会产生一定偏差,因此实际感知结果要弱于表1结果。
因为从一幅图片的某个区域提取出的 ORB特征数量与该区域的大小有着直接关系,在对faceOcc1序列进行测试的时候,跟踪窗口大小为114× 162像素,而在对faceOcc2序列进行测试的时候,跟踪窗口大小为82×98像素。因此后续实验中,遮挡阈值λO大小的设置依据为

4.3 评估遮挡感知器记忆容量对算法性能影响
前面已经讨论过遮挡感知器的更新是一个两难选择,从遮挡感知准确度的角度来考虑,感知器记忆的 ORB特征一定是越多越好,但是从存储空间和算法效率来考虑,感知器记忆的 ORB特征不宜太多。本节实验利用遮挡持续时间最长的faceOcc1来测试。测试过程中,分别限定遮挡感知器的记忆容量为10帧、20帧、30帧和40帧,并统计每帧图像的定位误差(定位误差用跟踪窗口位置和目标实际位置间的距离来衡量),其结果如图4(a)所示。从图中可以看出,前50帧时4条曲线基本吻合,50帧之后,遮挡情况出现,由于遮挡感知器记忆的特征数量不一样导致判决结果不一致,从而使Boosting分类器维护的特征池发生变化,所以4条曲线逐渐分离。4条曲线的分布表明,遮挡感知器记忆容量的不同会对跟踪器的定位产生较大影响,随着遮挡感知器记忆的特征数量的减小,跟踪器的定位误差会逐渐上升。但同时,根据图4 (b)结果可以发现,记忆容量的限定有助于提高算法效率。如图4 (b)所示,当记忆容量为40帧时,每秒只能处理5.5帧图像;当记忆容量降到10帧时,每秒能处理至少9帧图像。
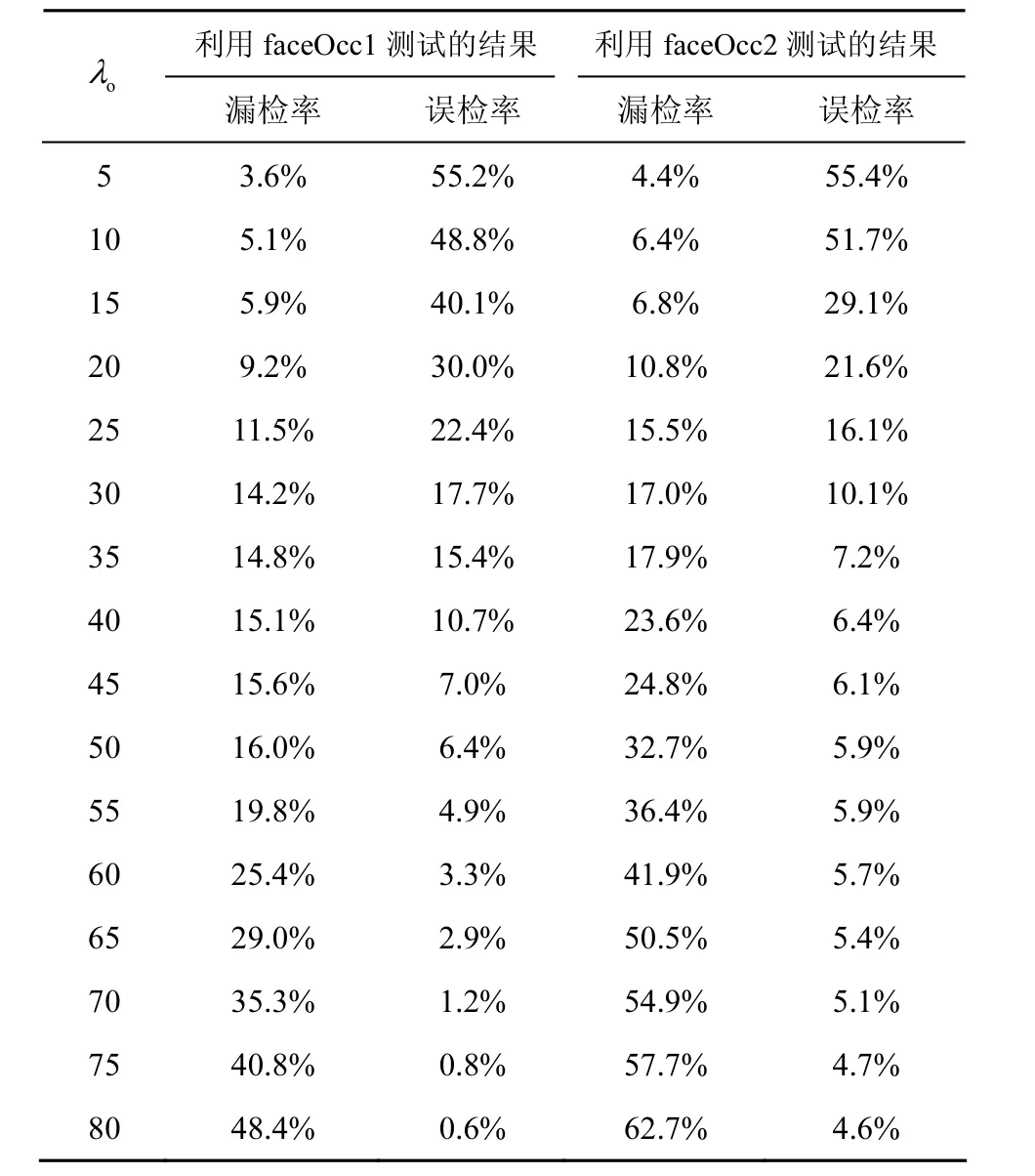
表1 遮挡感知器性能测试
综合考虑算法性能和效率,后续实验中,设置遮挡感知器的记忆容量为 30帧,即每次保存最新的30帧图像的ORB特征。
4.4 遮挡环境下跟踪算法性能比较
本文挑选了传统在线Boosting跟踪算法(OAB)、半监督 Boosting跟踪算法(SBT)、多实例学习跟踪算法(MIL)以及一种静态抗遮挡跟踪算法(Frag)与本文算法进行比较,利用6种包含遮挡内容的序列coke、tiger2、faceOcc1、faceOcc2、walking2和woman进行测试(粗略定义遮挡情况为目标被遮挡的区域超过)。每帧图像定位误差(定位误差用跟踪窗口位置和目标实际位置间的距离来衡量)和跟踪结果分别如图5和图6所示。
标准测试序列 coke在第 39、165、220、253帧处出现遮挡情况,其中,在第220和253帧处出现严重遮挡(目标被遮挡的区域超过),但从图5中可以看出在第 39、165、220帧处,本文算法的定位误差维持在较小数值上,而在第253帧处,虽然本文算法的定位误差有所增加,但依然保持在可控范围之内,没有丢失目标。

图4 遮挡感知器的记忆容量对算法性能的影响
标准测试序列tiger2不仅包含有遮挡内容,同时目标外观还在不断发生变化,因此跟踪难度较大。其中,在第 97、253、337帧等处出现遮挡情况,同时在第41、125、273、316帧等处目标外观发生较大程度的改变。本文算法由于增加了遮挡感知器,能有效降低遮挡问题对算法的影响。此外在线Boosting跟踪算法本身具有较强的在线学习适应能力,能有效跟踪外观变化的目标,因此在 tiger2序列中,本文算法能对目标进行有效地跟踪。
faceOcc1和 faceOcc2是用来测试跟踪算法面对遮挡问题顽健性的标准测试序列,其中,faceOcc1在115、177、308、496、828帧等处出现遮挡情况,由于在该序列中,遮挡持续时间较长,超出了遮挡感知器的记忆容量,导致定位误差出现局部波动,但本文算法自始至终没有出现窗口漂移现象。faceOcc2在141、420、702帧等处出现遮挡情况,在 343、594帧等处目标外观发生变化,但无论是遮挡情况还是目标外观变化,本文算法始终保持准确的目标定位。
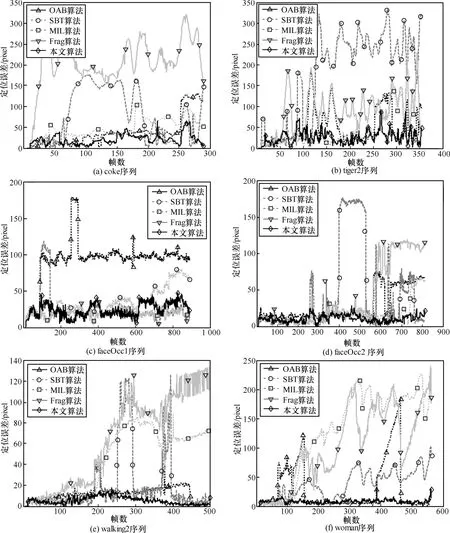
图5 定位误差定量分析
标准测试序列walking2在204帧处出现目标遮挡情况,并且目标尺度发生变化,本文算法虽然不具备尺度调节功能,但是由于目标尺度是缓慢变化的,因此跟踪算法能够通过在线学习的方式有效适应这种变化,不会出现丢失目标的情况。
标准测试序列woman在133、390帧等处出现目标遮档情况,此外目标还发生一定程度的形态和尺度变化,但是从图6结果来看,本文算法能有效克服目标遮挡以及目标形态、尺度变化对跟踪算法的影响。
为了检验遮挡感知器在实际跟踪过程中的性能,本文统计遮挡感知器在实际跟踪过程中的误检率和漏检率,结果如表2所示,可以看出在实际跟踪过程中,遮挡感知器能够正常应用,但依然存在着一定程度的漏检和误检,下面将分析遮挡漏检和误检对跟踪算法的影响。
在线 Boosting跟踪算法产生窗口漂移的原因是不正确的样本训练产生误差累积,因此遮挡感知器的作用就是延缓Boosting分类器的误差累积过程,即使一些遮挡情况被漏判,也不会对跟踪器产生严重后果。对于遮挡误判的情况,会限制跟踪器的学习能力,降低算法适应性,但是从表2结果看出,误检率普遍较低,不会对跟踪算法的适应性产生根本影响。

图6 6种测试序列的跟踪结果
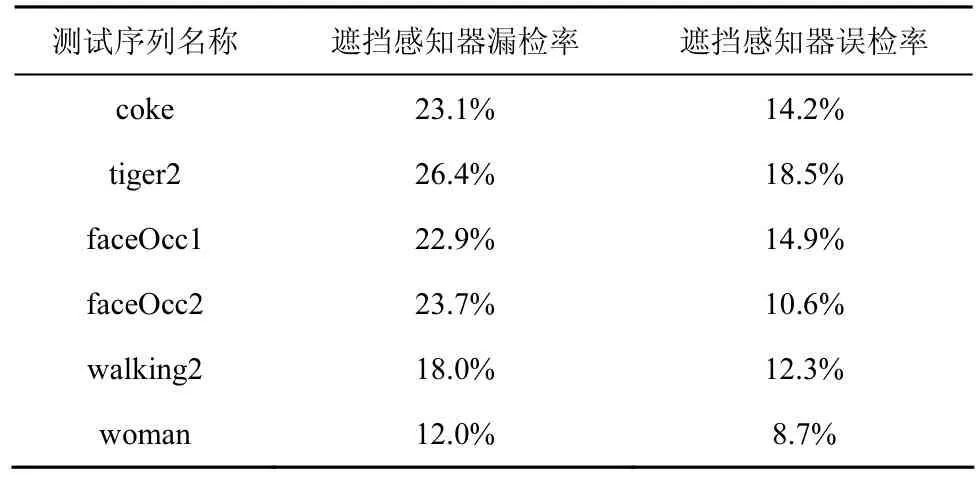
表2 遮挡感知器实际漏检率和误检率统计
4.5 与其他顽健跟踪算法的跟踪性能比较
4.4节实验说明本文算法对遮挡问题具有较好的顽健性,为了进一步评估本文算法全方位的性能,根据文献[16]的研究成果挑选了10种现阶段性能较好的跟踪算法(TLD、MIL、CT、DFT、IVT、SCM、VTD、ASLA、Struck、CSK)做对比,在 12幅图片序列(deer、girl、mountainBike、singer2、fish、soccer、doll、liquor、matrix、motorRolling、shaking、walking1)上进行测试,测试序列包括目标形变、光照变化、复杂背景、运动模糊等挑战内容。每种算法在所有测试序列中的平均定位误差记录在表3中,其中,定位误差用跟踪窗口位置与目标真实位置之间的距离来表示,单位是像素。表格中最右列的数据是利用本文跟踪算法获得的平均定位误差,括号内的数值表示本文算法就定位准确度而言,在11种跟踪算法中的排名。
下面就目标外观变化、运动模糊、目标尺度变化、复杂背景干扰等方面对算法进行适应性分析。
目标外观变化。当利用包含有目标外观变化的标准测试序列motorRolling和girl进行测试时,本文算法的表现较好,在 11种跟踪算法比较中分别排第1、第2。出现这样的情况是因为在线Boosting跟踪算法是一种在线学习跟踪算法,该算法通过不断地采集正负样本来训练分类器使分类器能够较好地适应目标外观的变化。
运动模糊。由于本文算法采用的是Haar-like特征,对图像模糊顽健性较好,因此本文算法在面对运动模糊问题时表现较好,如利用标准测试序列fish、deer和mountainBike进行测试时,在11种跟踪算法比较中分别排第1、第2、第2。
目标尺度变化。由于本文算法无法自适应调节跟踪窗口大小,因此在跟踪尺度发生变化的目标时表现一般,如利用标准测试序列walking1、doll和singer2进行测试的时候,在11种跟踪算法比较中分别排第5、第4、第3。
复杂背景干扰。从表3可以看出,当利用标准测试序列matrix、soccer和shaking进行测试的时候,本文算法的表现很不理想,在 11种跟踪算法比较中分别排第 6、第 6、第 4。matrix、soccer以及 shaking都是包含有复杂背景干扰的标准测试序列,其中,序列matrix背景中洒落的雨水以及闪电带来的亮度变化、序列 soccer背景中漂浮的红色烟花、序列shaking背景中灯光的变化都属于复杂背景干扰的范畴。由于跟踪窗口中除了跟踪目标外,不可避免的会包含一定量的背景信息,因此复杂的背景变化依然会对分类器特征池产生一定量的污染,导致产生窗口漂移现象,所以本文算法在复杂背景下跟踪的顽健性较差。
4.6 算法处理效率测试
为了评估本文算法的处理效率,分别统计了本文算法与OAB、SBT、MIL和Frag在6个测试序列(coke、tiger2、faceOcc1、faceOcc2、walking2、woman)上的处理速度,如表 4所示,表中数据记录的是5种算法分别在6个测试序列上处理速度的平均值,单位为每秒处理的帧数,表中最右侧数据为本文算法的处理速度。可以看出,由于本文改进在线Boosting跟踪算法增加了遮挡感知器,所以运算复杂度有所增加,因此和OAB算法相比,本文算法在效率方面有所下降,但和SBT以及Frag算法相比,本文算法在运算速率方面依然具有一定优势。另外需要说明的是,表 4结果是在遮挡感知器记忆容量为30帧特征的条件下测得的,如果想要进一步提高算法速度,可以通过减小遮挡感知器的记忆容量来实现。
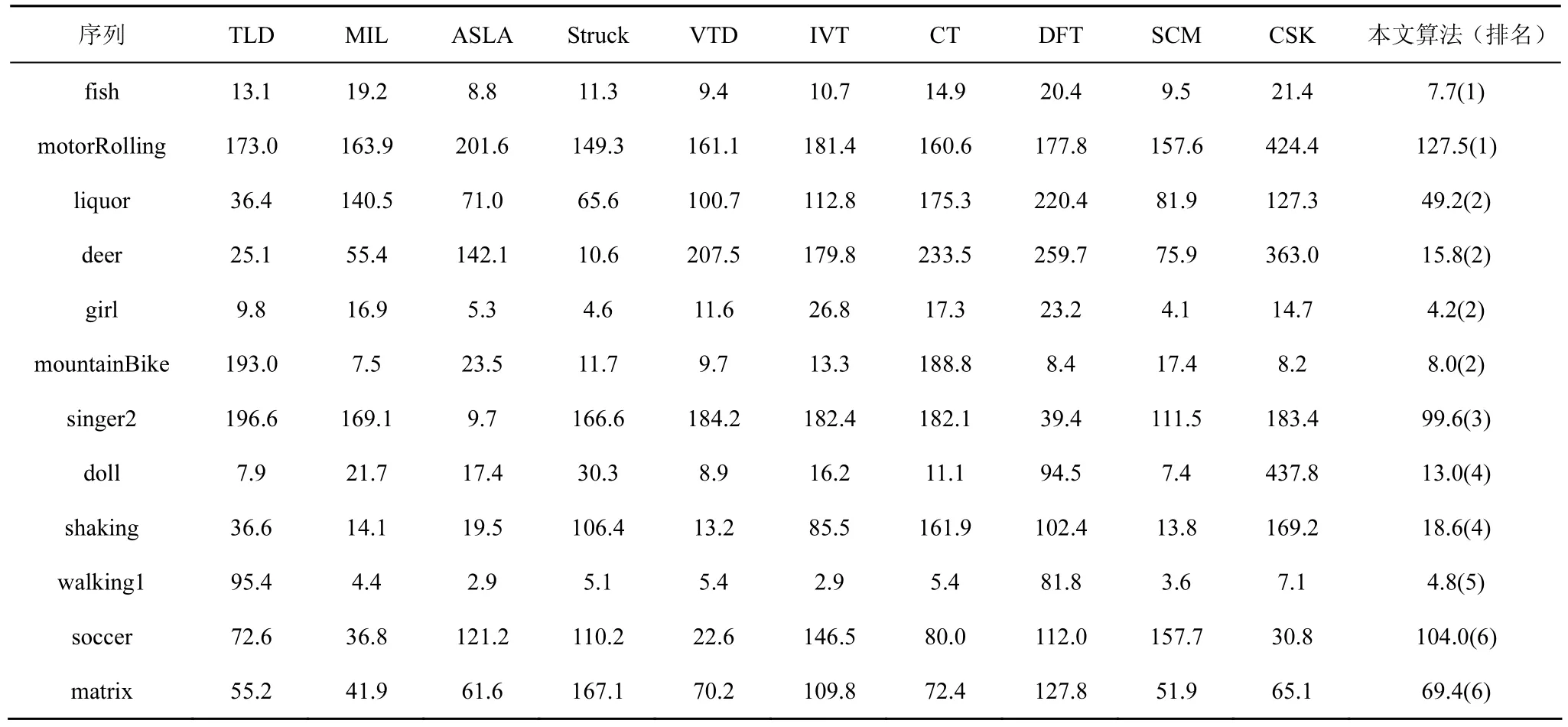
表3 与现有跟踪算法在定位准确度(像素)方面的比较
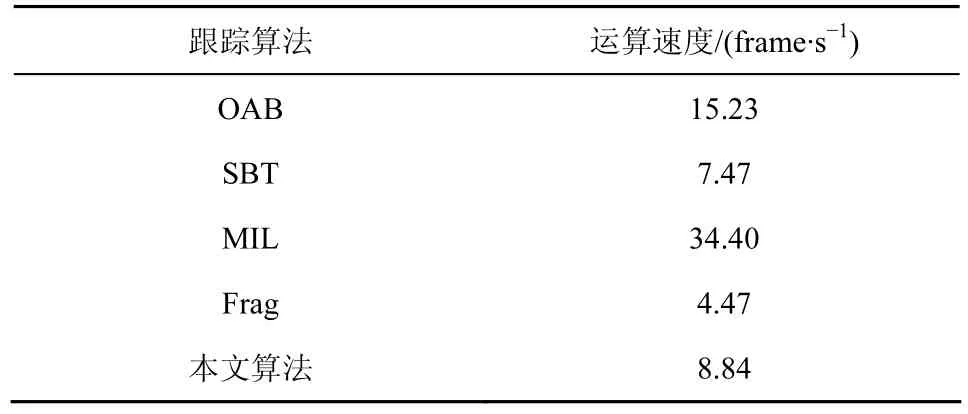
表4 跟踪算法运算速度比较
5 结束语
本文针对传统在线Boosting跟踪算法在目标发生遮挡时易造成窗口漂移的缺点,引入遮挡感知机制,对目标是否受到遮挡进行检测,并根据检测结果调整分类器更新策略,避免了采集受污染的正样本进行训练,从而维护分类器特征池的纯净。为了提高遮挡感知的精度,对遮挡感知中的特征选择、过滤、匹配及更新等各个环节进行了设计,保证了算法的应用效果。本文在实验部分对遮挡感知器的性能和算法的整体跟踪性能进行了测试,并对跟踪算法的适应性进行了深入分析和讨论,实验结果表明,本文算法在遮挡条件下具有较好的顽健性。值得一提的是,本文提出的遮挡感知算法还可以与其他的在线自适应跟踪算法相结合,提高这些算法应对遮挡问题的顽健性。
[1] 罗会兰, 杜芳芳, 孔繁胜. 像素点特征加权的尺度自适应跟踪算法[J].通信学报, 2015, 36(10): 200-211.LUO H L, DU F F, KONG F S. Pixel feature-weighted scale-adaptive object tracking algorithm[J]. Journal on Communication, 2015, 36(10):200-211.
[2] 张焕龙, 胡士强, 杨国胜. 基于外观模型学习的视频目标跟踪方法综述[J]. 计算机研究与发展, 2015, 52(1): 177-190.ZHANG H L, HU S Q, YANG G S. Video object tracking based on appearance models learning[J]. Journal of Computer Research and Development, 2015, 52(1):177-190.
[3] BAI Y, TANG M. Robust tracking via weakly supervised ranking SVM[C]//The IEEE Conference on Computer Vision and Pattern Recognition. 2012: 1854-1861.
[4] GRABNER H, BISCHOF H. On-line boosting and vision[C]//The IEEE Conference on Computer Vision and Pattern Recognition. 2006:260-267.
[5] 程有龙, 李斌, 张文聪, 等. 融合先验知识的自适应行人跟踪算法[J]. 模式识别与人工智能, 2009, 22(5): 704-708.CHENG Y L, LI B, ZHANG W C, et al. An adaptive pedestrian tracking algorithm with prior knowledge[J]. PR amp; AI, 2009, 22(5): 704-708.
[6] 颜佳, 吴敏渊. 遮挡环境下采用在线Boosting的目标跟踪[J]. 光学精密工程, 2012, 20(2): 439-446.YAN J, WU M Y. On-line boosting based target tracking under occlusion[J]. Optics and Precision Engineering, 2012, 20(2): 439-446.
[7] ADAM A, RIVLIN E, SHIMSHONI I. Robust fragments-based tracking using the integral histogram[C]//The IEEE Conference on Computer Vision and Pattern Recognition. 2006: 798-805.
[8] HU H, MA B, WU Y, et al. Kernel regression based online boosting tracking[J]. Journal of Information Science and Engineering, 2015,31(1): 267-282.
[9] YANG F, LU H, YANG M H. Robust visual tracking via multiple kernel boosting with affinity constraints[J]. IEEE Transactions on Circuits and Systems for Video Technology, 2014, 24(2): 242-254.
[10] GRABNER H, LEISTNER C, BISCHOF H. Semi-supervised on-line boosting for robust tracking[C]//The European Conference on Computer Vision. 2008: 234-247.
[11] 陈思, 苏松志, 李绍滋, 等. 基于在线半监督 Boosting的协同训练目标跟踪算法[J]. 电子与信息学报, 2014, 36(4): 888-895.CHEN S, SU S Z, LI S Z, et al. A novel co-training object tracking algorithm based on online semi-supervised Boosting[J]. Journal of Electronics amp; Information Technology, 2014, 36(4): 888-895.
[12] BABENKO B, YANG M H, BELONGIE S. Robust object tracking with online multiple instance learning[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2011, 33(8): 1619-1632.
[13] RUBLEE E, RABAUD V, KONOLIGE K, et al. ORB: an efficient alternative to SIFT or SURF[C]//The International Conference on Computer Vision. 2011: 2564-2571.
[14] 唐剑琪, 谢林江, 袁庆生, 等. 基于 ORB 的镜头边界检测算法[J].通信学报,2013,34(11): 184-190.TANG J Q, XIE L J, YUAN Q S, et al. Shot boundary detection algorithm based on ORB[J]. Journal on Communication, 2013, 34(11):184-190.
[15] PERNICI F, DEL B A. Object tracking by oversampling local features[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2014, 36(12): 2538-2551.
[16] WU Y, LIM J, YANG M H. Online object tracking: a benchmark[C]//The IEEE Conference on Computer Vision and Pattern Recognition. 2013: 2411-2418.
Online Boosting tracking algorithm combined with occlusion sensing
WANG Ya-wen, CHEN Hong-chang, LI Shao-mei, GAO Chao
(National Digital Switching System Engineering amp; Technology Ramp;D Center, Zhengzhou 450002, China)
Online Boosting tracking algorithm combined with occlusion sensing was presented. In this method, occlusion sensor was introduced to check the tracking results, and classifier updating strategy was adjusted depending on the occlusion checking results. By this way, the feature pool of the classifier can be kept pure, which will improve the tracking robustness under occlusion. Experimental results show that compared with traditional Boosting tracking algorithm, improved algorithm can solve the problem of occlusion very well.
online Boosting, occlusion sensing, ORB feature, object tracking
s:The National Natural Science Foundation of China (No.61379151, No.61521003), The National Science and Technology Support Program of China (No.2014BAH30B01), The Henan Province Science Found for Distinguished Young Scholars of China (No.144100510001)
TP391.41
A
10.11959/j.issn.1000-436x.2016181
2016-01-25;
2016-08-10
国家自然科学基金资助项目(No.61379151, No.61521003);国家科技支撑计划基金资助项目(No.2014BAH30B01);河南省杰出青年基金资助项目(No.144100510001)
王亚文(1990-),男,河南郑州人,硕士,国家数字交换系统工程技术研究中心博士生,主要研究方向为多媒体技术、模式识别、计算机视觉等。
陈鸿昶(1964-),男,河南新密人,国家数字交换系统工程技术研究中心教授、博士生导师,主要研究方向为电信网安全防护技术。
李邵梅(1982-),女,湖北钟祥人,博士,国家数字交换系统工程技术研究中心讲师,主要研究方向为多媒体技术、模式识别、计算机视觉等。
高超(1982-),男,河南新郑人,博士,国家数字交换系统工程技术研究中心讲师,主要研究方向为多媒体技术、模式识别、计算机视觉等。
