基于Simulink和VRML的球式自动平衡装置虚拟实验平台研究
2016-11-24任志湘
谭 青, 魏 来, 任志湘, 江 波
(中南大学 机电工程学院,长沙 410083)
基于Simulink和VRML的球式自动平衡装置虚拟实验平台研究
谭 青, 魏 来, 任志湘, 江 波
(中南大学 机电工程学院,长沙 410083)
对球式自动平衡装置虚拟实验进行了研究,建立了球式自动平衡装置虚拟实验平台。该平台采用基于Simulink和VRML的运动仿真和建模方法,通过建立控制转盘和滚球运动的Simulink模型,以及球式自动平衡装置的VR场景,来模拟真实的实验环境。然后在主界面上输入实验参数,以进行虚拟实验。通过可视化观察实验过程中滚球运动状态,以及生成的实验结果曲线,对滚球的平衡过程进行分析,分析结果与自同期理论相符。最后通过搭建真实实验台进行实验验证,实验结果进一步表明了该虚拟实验平台具有良好的有效性及可靠性。
球式自动平衡;虚拟实验;Simulink;VRML;自同期
因转子不平衡引起的振动和噪声是回转机械中最为常见的问题之一。解决这一问题的一般方法是对其回转部分(即转子)进行高精度的动静平衡[1-3]。由此,学术界展开了自动平衡课题的研究。其中球式自动平衡装置是根据柔性转子和弹性支撑的特性,利用系统响应所形成的能量来驱动滚球的移动和分布,从而自动地消除转子的不平衡。国内外研究均表明球式自动平衡装置对于运动在过临界转速下的旋转机械有较好的减振效益[4-8]。
虚拟实验是以计算机为依托,借助于虚拟现实技术[9]和仿真软件模拟实验环境及过程的仿真实验。利用虚拟现实技术进行的虚拟实验具有科学性、可实现性、直观性,交互性、可控性,可重复性、方便性和节省性等优点。随着计算机技术和虚拟现实技术的迅速发展以及科学研究进一步深入的需要,虚拟实验技术日益成熟和完善。
虚拟实验的研究在发达国家已经十分普及,许多国家都进行了虚拟实验的研究,并获得了很多研究成果,文献[10-11]中详细介绍了虚拟实验的相关概念及发展现状。与此同时,还有许多大学与科研院所也开展了关于虚拟实验的探索性研究,并获取了很好的研究成果。如德国波鸿·鲁尔大学研发的虚拟控制实验室[12],综合应用多种插件和Java applet,该虚拟实验的仿真和交互操作是采用MATLAB的工具库Simulink[13]实现的,它的虚拟实验场景采用虚拟现实建模语言VRML[14]编写,用户通过网络信息浏览器使用该虚拟实验室。该虚拟控制实验室容纳了多个经典的工程控制实验,虚拟场景十分逼真,具有很好的交互性及可视化效果。又如清华大学的工程力学虚拟实验室[15],该虚拟实验室依据力学的理论基础和真实的实验数据,进行力学的虚拟实验,其实验场景生动逼真,实验内容丰富,且交互性强,并具有良好的人机交互界面。
在球式自动平衡技术以往的研究中存在着仿真及实验过程不具有直观性和交互性,对减振能力影响因素的分析过程不够简便,且在现有实验条件下难以观测滚球到达平衡位置的完整动态过程等问题。因此,需要一个高度仿真、易操作、交互性强、功能完善的球式自动平衡装置虚拟实验平台。
本文提出一种基于Simulink和VR的球式自动平衡装置虚拟实验平台,利用该平台可方便的进行参数化虚拟仿真实验,考察影响球式自动平衡装置实现平衡的因素,并能观测真实实验中无法观察到的滚球运动过程,具有良好的可视性及交互性,使球式自动平衡装置的研究变得直观、便捷。
1 球式自动平衡装置的数学模型
球式自动平衡装置的工作原理是转子在过临界转速下旋转时,转子内滚球的位置将自动的受转子机械振动相位的影响,移动到偏心质量的对面,在一定程度上抵消偏心质量所产生的离心惯性力,从而起到减振的作用。
球式自动平衡装置的主要结构示意图如图1所示,转盘固定在一根转轴上,转盘滚道内装有若干滚球,其中转盘中心位于O点,G处为不平衡质量,偏心距为e,滚球在半径为R的滚道上运行。在建立数学模型时,将其结构简化为转盘和滚球两部分,并做如下假设:
1) 转盘为均质圆形薄盘;
2) 电机驱动力矩足够大,转速不会因阻力矩大小产生变化;
3) 球与滚道之间无相对滑动;
4) 转盘处在水平方向,不考虑轴向运动及重力影响。
系统运动限制在XY平面内,刚度和阻尼简化到水平和竖直方向上。

图1 球式自动平衡装置主要结构示意Fig.1 Main structure of the ball-type automatic balancer
文中符号的表示如下(单位均采用国际标准单位):O0为坐标系的原点;O为转盘的几何中心(系统静止时O和O0重合);X、Y为转盘中心O的坐标;Kx、KY为转盘X方向的刚度系数、Y方向的刚度系数;CX、CY为转盘X方向的黏性阻尼系数、Y方向的黏性阻尼系数;θ为不平衡质量相对于X轴的转角;Φi为第i个滚球的转角;Bi为第i个滚球的质心;β0为滚球的滚动摩擦因数;β1为滚球的黏性阻尼系数;m1、m2、m3、m分别为偏心质量、转盘质量、电机质量、滚球质量;n为滚球个数;M为系统总质量(M=m1+m2+m3+nm);I、I1、I2分别为滚球转动惯量、偏心质量转动惯量、圆盘转动惯量;R、r分别为滚球转动半径、滚球半径。
根据拉格朗日运动微分方程建立球式自动平衡装置的数学模型,其推导过程参照文献[16]第17~19页,得到系统微分方程如下:
(1)
2 虚拟实验平台的基本框架
球式自动平衡装置虚拟实验平台是一个利用计算机仿真软件Simulink和VR虚拟现实技术模拟出球式自动平衡装置实验过程的平台。
用户可以根据实验需求在基于MATLAB图形用户界面技术(GUI)设计的主界面上输入相关参数(即设定实验条件),然后点击相应的按钮,虚拟实验平台中的球式自动平衡装置便在用户的控制下运行,用户可看到接近真实的实验环境,直观地观察到球式自动平衡装置中转盘和滚球的运动状态,能随时暂停实验或用步进方式进行实验,还可看到实时显示的实验装置振幅曲线。实验完毕,在主界面点击相应按钮,即可一键生成实验结果,得到完整的振幅曲线,并可将实验条件和实验数据导出到表格文件以便进行数据后处理。这些功能使得平台具有良好的交互性、实时性和灵活性。
平台的实现采用模块化的设计方法,将平台的功能分成多个模块,主要由主界面模块、虚拟场景模块、数值求解模块、交互控制模块四个功能模块组成。功能模块关系如图2所示。

图2 虚拟实验平台功能模块关系Fig.2 Relationship between functional modules of virtual experiment platform
平台的各个功能模块之间是相互联系的,其中工作空间(Workspace)是指MATLAB的基本工作空间,用来存储数据变量。Simulink模型的所有参数默认调用基本工作空间中的数据,因此可以通过工作空间实现数据共享,将数值求解模块计算的数据传递给Simulink模型。平台的工作流程图如图3所示。

图3 平台工作流程Fig.3 Platform workflow
3 平台功能模块的设计与实现
3.1 主界面
主界面由三个面板(Panel)控件组成,对应将主界面分成三个区,分别是参数设置区、虚拟实验控制区、通用功能区。界面的对象层次关系如图4所示。
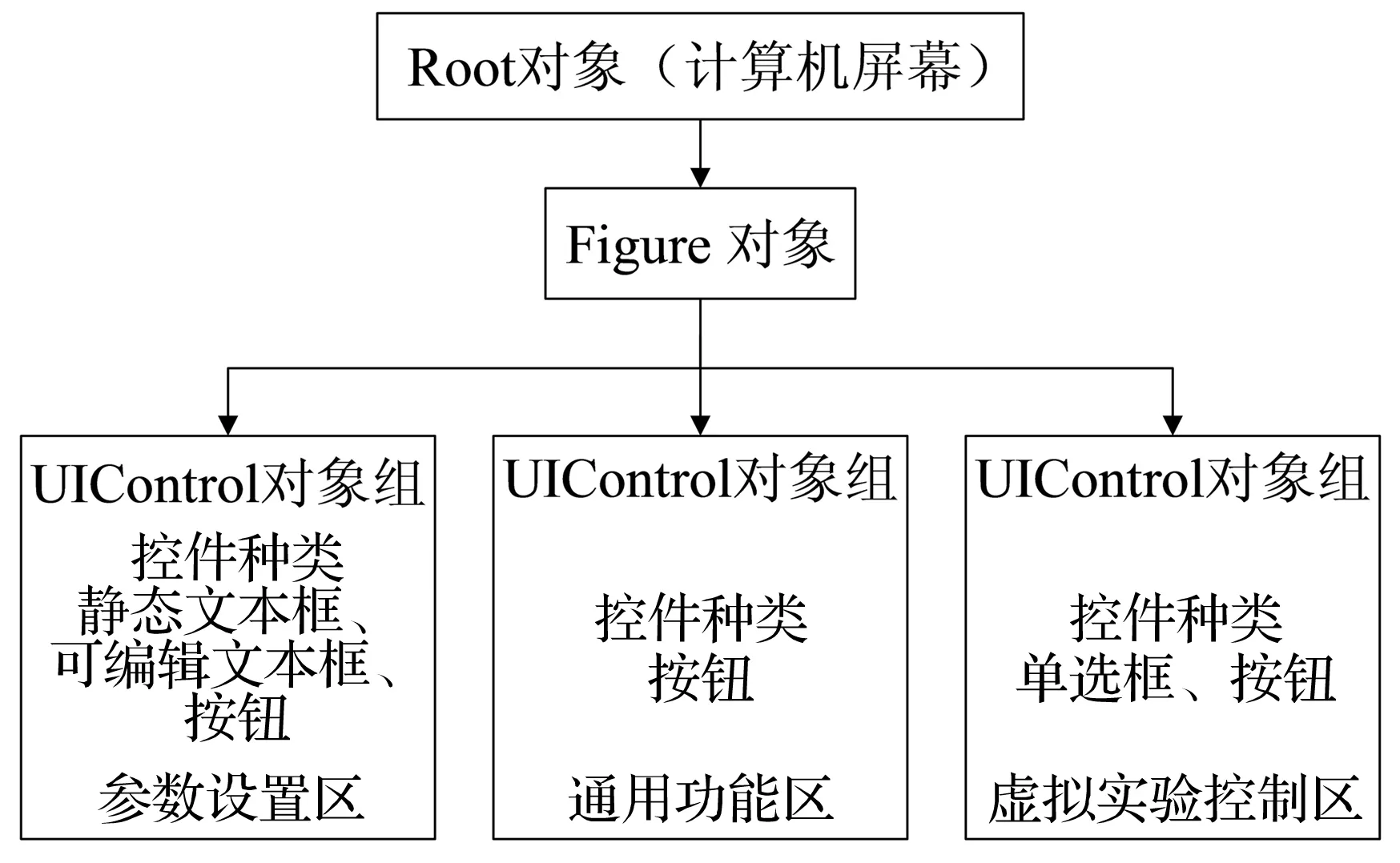
图4 主界面对象层次结构Fig.4 User-interface object hierarchy
主界面模块设计基于简洁清晰、操作方便的设计思想,采用图形化的界面,将参数设置模块和通用功能模块以及虚拟实验控制模块集中在界面上,避免用户在操作过程中出现众多界面导致的操作步骤繁琐。
参数设置区用来输入进行球式自动平衡装置虚拟实验所需要的条件,输入的参数被M脚本程序所获取用以进行运动微分方程的计算。
虚拟实验控制区用来控制虚拟实验的显示模式及初始化、运行、暂停、继续、停止、步进等功能。
通用功能区则用来实现虚拟实验平台的查看结果曲线、保存数据、重新实验、退出系统等功能。
3.2 虚拟场景
虚拟场景模块是虚拟实验平台中的重要功能模块,它是实现虚拟实验动态可视化的基础。虚拟场景的模型由虚拟实验室场景和虚拟实验设备组成,本文采用虚拟现实建模语言VRML结合三维建模软件Pro/E和3ds Max进行开发。
VRML是一种虚拟现实建模语言,用来创建真实世界的场景模型或人们所构想的虚拟世界,它具有平台无关性。它克服了以往虚拟现实单一、交互性不强的缺点,将人的行动作为浏览虚拟场景的主体,为用户创建了一个可融入的虚拟世界,虚拟世界由许多的原始对象按照一定的层次结构一级级地组织起来,构成各种复杂的场景,从而形成丰富多彩的虚拟世界,这便是构造虚拟世界的基本原理。
建立虚拟场景模型的步骤如下 :① 利用Pro/E建立球式自动平衡实验装置的三维模型;② 利用3ds Max建立虚拟实验室场景模型;③ 将Pro/E和3ds Max建立的模型导出为.wrl格式文件,然后把各个wrl文件在VRML编辑器中进行场景整合,并进行优化处理。
3.3 数值求解
3.3.1 仿真算法
机械系统的数学模型一般为微分方程或微分方程组,数值积分法中龙格-库塔法是最为常用的数值计算方法,本实验平台的数值计算采用四阶龙格-库塔法。
对于通用格式的一阶微分方程,如果初值可以确定,则借助微机可采用龙格-库塔法求解。
如对下式所示初值问题:
(2)
采用四阶龙格-库塔法求解的递推方法为:
(3)
式中:h为步长,ki为:
(4)
3.3.2 系统运动微分方程化简
将球式自动平衡实验装置的系统微分方程式(1)化为适用于龙格-库塔仿真算法通用格式的一阶微分方程组。本实验台内置无球、单球、双球、三球四种系统。以装有三球的球式自动平衡装置为例,介绍其降阶化成通用的仿真格式方程的步骤。将实验台三球系统的数学模型进行降阶处理,取:
S=[S1,S2,S3,S4,S5,S6,S7,S8,S9,S10]T=
将上式定义的广义坐标代入式(1)得到式(5):
(5)
3.3.3 碰撞处理
球式自动平衡装置中的滚球在运动时可能会发生碰撞,在龙格-库塔法的一个步求解后,需要检查球的位置是否干涉,如果干涉,须做碰撞处理。
对于在滚道中运动的滚球,由于存在摩擦和黏性阻尼,数值仿真分析时可视为完全非弹性碰撞。
两球碰撞的判断条件为两球夹角φ满足:
φ<2arcsin(r/R)
(6)
当两滚球碰撞时,两球各移动的角度δ为:
δ=(2arcsin(r/R)-α)/2
(7)
两球速度均变为:
(8)
滚球碰撞处理的示意图如图5所示。

图5 滚球碰撞示意Fig.5 Ball collision signal
3.4 交互控制
交互控制模块主要是用来控制球式自动平衡装置虚拟实验过程动态可视化显示,通过建立Simulink模型实现。模型通过Simulink中Gain模块获取输入的初始条件滚球个数、滚球半径等输入参数,再结合AND和Switch等条件判断选用合适的滚球,并将所选取的滚球在盘中的位置设置为主界面中输入的初始位置。Simulink模型可以获取数值求解模块的计算结果,作为Simulink的信号源(Source)通过Simulink中VR Sink模块输出给VR虚拟场景中的相应节点,同时还可以获取图形界面输入的初始条件与控制信号来控制虚拟实验的进行。
该虚拟实验平台选用了三组不同大小的滚球,每组有三个,然后再分别建立每个滚球的rotation节点和translation节点的Simulink模型,以及转盘rotation节点的Simulink模型,最后建立总Simulink模型。其中1号球rotation节点的Simulink模型及总Simulink模型如图6所示。
Simulink模型建立后,设置仿真开始、结束时间,与数值求解程序中设置一致,仿真时间为0~50 s,仿真步长为定步长0.005,仿真算法采用ode4(四阶龙格-库塔法)。

图6 Simulink模型Fig.6 Simulink model
4 虚拟实验平台运行实例
在MATLAB环境中,进入用户界面,同时打开虚拟实验室场景,如图7所示。用户首先要在主界面上输入实验的初始条件,如滚动摩擦因数、黏性阻尼系数、偏心质量、滚球质量、滚球半径、滚球个数、滚球的初始角度、稳态转速等。

图7 虚拟实验平台界面Fig.7 Interface of virtual experiment platform
实验参数设置完毕后,在虚拟实验控制区进行实验运行模式的选择,实验运行模式有“正常模式”和“球相对盘”模式,默认为“正常模式”。“球相对盘”模式是将参考点固化在盘上,即转盘不动、球相对于盘的视角模式,采用“球相对盘模式” 能够以圆盘的角度观察滚球相对盘运动情况,这在真实实验中是无法观察到的。
然后点击虚拟实验控制区的“初始化”按钮,虚拟场景中的滚球便会按照用户设置的滚球半径与滚球个数自动选取球盒中的滚球,并按照用户设置的滚球初始位置放置到转盘中。再点击“运行”按钮,转盘开始加速转动,加速至电机稳态转速后开始匀速转动。实验过程中,可以点击“暂停”按钮,查看当前滚球的运行位置,然后点击“步进”按钮可以放慢滚球的运动状态,使其以步进方式运动,以便观察其动态运动规律。点击“暂停”或“步进”按钮之后可以通过点击“继续”按钮来恢复连续的运行状态。最后,点击“停止”按钮,实验装置便停止运行。在平台界面的右上角可以实时显示转盘的振幅曲线。
实验完成后点击“结果曲线”按钮可以查看实验结果,“结果曲线”界面如图8所示。
下面分别用无滚球、2个滚球进行虚拟实验以对球式自动平衡装置虚拟实验平台进行验证。实验参数取值见表1。为了使仿真计算和实际情况一致,依据现实实验中电机的稳态转速为23.33 r/s,仿真中同样设置电机转速稳态值为23.33 r/s。

表1 实验参数(未注单位为国际单位)

图8 结果曲线Fig.8 Results
4.1 无滚球虚拟实验
无滚球下的球式自动平衡装置可视为普通不平衡转子,从实验结果的振幅曲线走向看出,刚开始由于转速不大,转子振幅较小,之后转子转速达到一阶临界转速后通过共振区,达到最大振幅,最后逐渐衰减为稳定值。在结果曲线界面中,放大曲线图可观察到最大振幅发生在1.8 s左右,此时的转速为9 r/s,此转速即为一阶临界转速。最大振幅值和残留振幅值如下(水平方向最大振幅由Ymax表示,残留振幅由Ybal表示)。
Ymax=1.07×10-3m,Ybal=9.63×10-5m
未装滚球虚拟实验结果如图9所示。
4.2 2个滚球虚拟实验
球式自动平衡装置内装有2个滚球,滚球与偏心质量的初始夹角分别为90°和180°,通过对滚球运动过程及对转子实时振幅的观察可知, 刚开始由于转速不

图9 未装滚球虚拟实验结果(Y方向振幅曲线)Fig.9 Virtual experiment results of 0 ball(The Y direction curve of amplitude)
大,转子振幅较小,之后转子转速达到一阶临界转速后通过共振区,达到最大振幅,该振幅超过了不装滚球时的最大振幅,通过对该阶段实验过程进行步进观察,发现转子达到最大振幅时,滚球位置是在不平衡质量的一侧,说明此时滚球加大了不平衡量,最后振幅逐渐衰减为一个稳定值,该稳定值远低于未装滚球时的残留振幅,说明滚球已经起到平衡不平衡质量的作用,减振效果明显,符合自同期现象[12]。最大振幅值和残留振幅值具体数据如下:
Ymax=2.01×10-3m,Xbal=1.47×10-6m
滚球1和滚球2与偏心质量最后的夹角分别为120.64°和241.04°,此时的不平衡量为1.17×10-5kg·m。球式自动平衡装置装有2个滚球的实验结果曲线如图10所示。
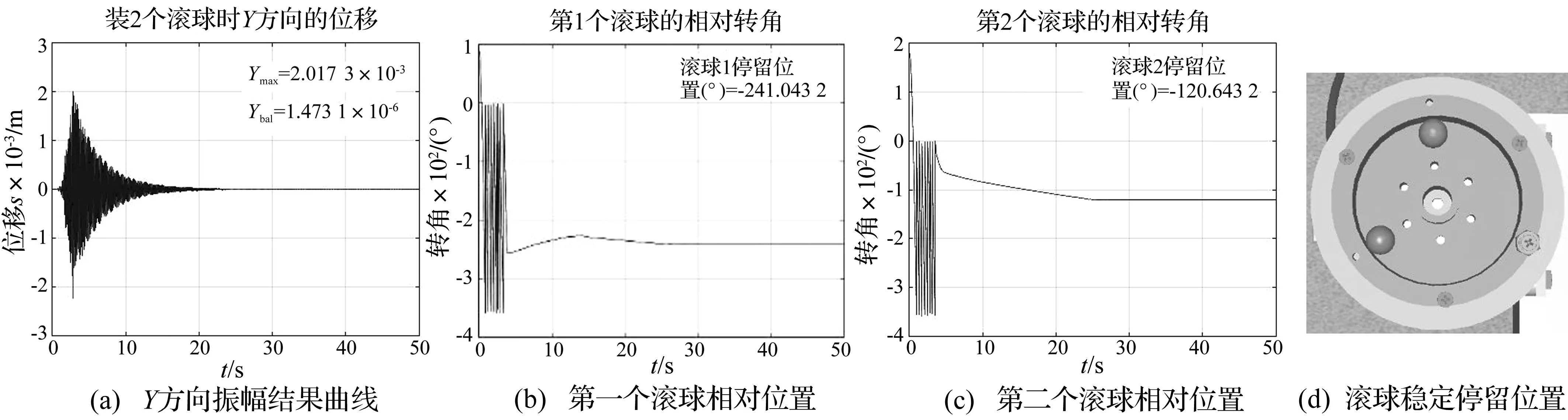
图10 2个滚球虚拟实验结果Fig.10 Virtual experiment results of 2 balls
5 真实实验验证
为进一步验证虚拟实验平台的有效性及可靠性,采用如图11所示实验方案进行真实实验验证。
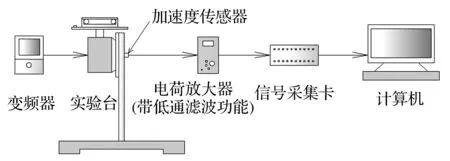
图11 真实实验方案Fig.11Real experiment program
在此方案中,由实验条件可计算出实验台的临界转速为8.2 r/s。开始实验时,首先装入所需数量的滚球,用变频器调好需要的稳态转速(本实验中为23.33 r/s),然后开机让电机自然加速,到达稳态转速后继续运行一段时间,最后关机停止运行,总时长计30 s(根据经验,这段时间足以使滚球达到稳定状态),并在电脑上对实验过程中通过信号采集卡采集到的数据进行分析。

图12 真实实验台Fig.12 The real test-bed
实验装置如图12所示,由1底座、2弹性支撑杆、3电动机、4连接转盘、5转盘和6变频器组成。电动机通过螺栓连接到支撑杆连接板上。支撑杆为材质均匀的45号钢。为满足实验需求,选用的变频器型号为SAJ8000-M,工作电压为220 V,功率为0.4 kW。本实验装置中,由于主轴直径较大且伸出的长度较小,认为电机转子和主轴的刚性远大于弹性支撑杆2,因此本文中把圆盘和主轴看做是一个盘状刚体。此外,为了减少因安装电机的铁架结构较薄弱而产生的振动,在铁架的底部放置如图12中所示铁块及人工加压来增加铁架结构的稳定程度。由于实验条件所限,实验中转盘会因不能保持水平而产生振动分量,但因其量值较小,本文认为可忽略不计,另外根据国内外文献,这种处理方法也是常见的。
下面分别在未装滚球和装有2个滚球情况下进行真实实验验证,真实实验参数与虚拟实验参数相同。
5.1 未装滚球真实实验
图13所示为转子在未装滚球时从开机到稳定状态的真实实验结果。观察实验结果可知,开机后,亚临界转速时振动逐渐加剧,振幅比较大;经过转子系统的共振区时达到了最大振幅值;在过临界转速时转子进入稳定振动状态,振动减弱,振幅值为一稳定值。通过放大观察真实实验振动曲线图可知最大振幅发生在实验开始后1.7 s左右,此时电机转速为8.5 r/s,此转速即为一阶临界转速,转速值与虚拟实验结果相符。最大振幅为1.10×10-3m,稳态振幅为7.60×10-4m。

图13 未装滚球真实实验结果(Y方向振幅曲线)Fig.13 Real experiments results of 0 ball (the Y direction curve of amplitude)
5.2 装2个滚球真实实验
图14所示为转子在装有2个滚球作用下从开机到稳定状态的实验结果。观察实验结果可知,开机后,亚临界转速时,2个滚球均偏向偏心质量一边,使不平衡加剧,从而增大了振幅,装有2个滚球的最大振幅为1.40×10-3m,比未装滚球时大。过临界转速时滚球运动到偏心质量对面,使得不平衡减弱,稳态振幅减小。装有2个滚球的稳态振幅为2.20×10-4m,比未装滚球时小。滚球最终的稳定停留位置处在偏心质量对面,与偏心质量夹角分别为119°、237°,此时的不平衡量为3.25×10-5kg·m,与虚拟实验中的不平衡量相符。实验结果表明,装有2个滚球时转子在亚临界转速时振幅增大,而在过临界转速时,与未装滚球的转子相比较实现了较好的减振效果。

图14 2个滚球真实实验结果Fig.14 Real experiments results of 2 balls
6 结 论
(1) 本文通过仿真软件Simulink及虚拟现实建模语言VRML建立了一个球式自动平衡装置虚拟实验平台,为球式自动平衡装置的研究提供了一种新方法。
(2) 通过在虚拟实验平台主界面上输入实验参数,可以便捷的生成结果曲线和数据等准确的实验结果,从而对实验结果进行分析。通过可视化观察实验过程中滚球运动状态,从而对滚球的平衡过程进行研究,并可在实验过程中实时显示转盘的振幅,实现了球式自动平衡装置实验过程的动态可视化。
(3) 通过未装滚球和装有2个滚球的虚拟实验及真实实验验证,得到的实验结果与自同期理论一致,不平衡转子的振幅均得到了有效衰减,从而证明了该虚拟实验平台的有效性与可靠性。
(4) 该虚拟实验平台采用模块化设计,具有交互性强、功能模块清晰、易于扩充等特点,能为以Simulink和VRML为基础开发其他虚拟实验平台提供很好的参考模型。
[1] 潘鑫,吴海琦,高金吉. 转子-轴承系统液体式在线自动平衡装置研究综述[J]. 振动与冲击,2015,34(6):95-100.
PAN Xin, WU Haiqi, GAO Jinji. Review for liquid-typed online auto-balancing devices in rotor-bearing systems [J]. Journal of Vibration and Shock, 2015, 34(6):95-100.
[2] 汪希萱,曾胜. 电磁式在线自动平衡系统及其动平衡方法研究[J]. 热能动力工程,2003,18(1):53-57.
WANG Xixuan, ZENG Sheng. Electromagnetic online auto balance system and research of its dynamic balance method [J]. Journal of Engineering for Thermal Energy and Power, 2003, 18(1): 53-57.
[3] 魏彤,向岷. 磁悬浮高速转子基于位移刚度力超前前馈补偿的高精度自动平衡方法[J]. 机械工程学报,2012,48(16):184-191.
WEI Tong, XIANG Min. Autobalancing for magnetically suspended high-speed rotors based on lead feedforward compensation for displacement stiffness force [J]. Journal of Mechanical Engineering, 2012,48(16): 184-191.
[4] 谭青,周铁,黄秀祥. 球式自动平衡装置的数值仿真与实验研究[J]. 噪声与振动控制,2008,28(3):142-145.
TAN Qing, ZHOU Tie, HUANG Xiuxiang. Numerical simulation and experimental study of automatic ball balancer[J]. Noise and Vibration Control,2008,28(3):142-145.
[5] RAJALINGHAM C, BHAT R B. Complete balancing of a disk mounted on a vertical cantilever shaft using a two ball automatic balancer [J]. Journal of Sound and Vibration, 2006, 290(1/2):169-191.
[6] LU C J, HUNG C H. Stability analysis of a three-ball automatic balancer [J]. Journal of Vibration and Acoustics, 2008, 130(5):786-791.
[7] LU C J. Stability analysis of a single-ball automatic balancer [J]. Journal of Vibration and Acoustics, 2006, 128(1): 122-125.
[8] SUNG C K, CHAN T C, CHAO C P, et al. Influence of external excitations on ball positioning of an automatic balancer[J]. Mechanism and Machine Theory, 2013, 69: 115-126.
[9] 邹湘军,孙健,何汉武,等. 虚拟现实技术的演变发展与展望[J]. 系统仿真学报,2004(9):1905-1909.
ZOU Xiangjun, SUN Jian, HE Hanwu, et al. The development and prospects of virtual reality[J]. Journal of System Simulation,2004(9):1905-1909.
[10] HUGO J. On the use of VRML in educational software Experiences from the project: JIMM problem solver[J].Future Generation Computer Systems,2000,17(1): 49-56.
[11] WEYRICH M, DREWS P. Virtual reality for design and management: the virtual workbench [J]. Computers in Industry, 1999,38 (4): 5-15.
[12] Ruhr-Universitat. Virtual Control Lab [EB/OL]. http://www.atp.ruhr-uni-bochum.de/VCLab/[1996-11-12].
[13] 陈永盛,吴斌,王贞,等. 基于Simulink的混合试验系统其验证[J]. 振动与冲击,2014,34(7):18-23.
CHEN Yongsheng, WU Bin, WANG Zhen, et al. Simulation and validation of a hybrid testing system with Simulink[J]. Journal of Vibration and Shock, 2014,34(7): 18-23.
[14] 师黎,王治忠,费敏锐. 基于VRML与MATLAB的智能控制虚拟实验室设计与实现[J]. 仪器仪表学报,2008,29(12):2594-2598.
SHI Li, WANG Zhizhong, FEI Minrui. Design and implementation of an intelligent control virtual laboratory based on VRML and MATLAB [J]. Chinese Journal of Scientific Instrument,2008,29(12):2594-2598.
[15] 清华大学.工程力学虚拟实验室[EB/OL]. http://jwc.henau.edu.cn/resource/thcw/j53/, 2001. Tsinghua University. Virtual laboratory for engineering mechanics [EB/OL]. http://jwc.henau.edu.cn/resource/thcw/j53/, 2001.
[16] 周铁. 内装滚球转子自同期现象的理论与实验研究[D].长沙: 中南大学,2008.
A virtual experiment platform of a ball-type automatic balancer based on Simulink and VRML
TAN Qing, WEI Lai, REN Zhixiang, JIANG Bo
(College of Mechanical & Electrical Engineering, Central South University, Changsha 410083, China)
Virtual experiment of a ball-type automatic balancer was studied and a virtual experiment platform of the ball-type automatic balancer was built. The platform simulated a real experiment environment by establishing Simulink models of plates’ and balls’ movement, and VR scene of the ball-type automatic balancer, based on Simulink motion simulation and VRML (virtual reality modeling language) modeling methods. Then parameters were input in the main interface to conduct virtual experiments. Through visual observation of ball’s state in the experiment and experimental results, we could analyze equilibrium process of balls. The results of the analysis are consistent with the theory of self-synchronizing. Finally, the experiments on real test-bed indicate that the virtual experimental platform has good validity and reliability.
virtual experiment; ball-type automatic balancer; Simulink; virtual reality modeling language (VRML); self-synchronizing
国家自然科学基金(51274252)
2015-08-11 修改稿收到日期:2015-10-26
谭青 男,博士,教授,博士生导师,1955年生
魏来 男,硕士生,1990年生
TH113.1;TP311
A
10.13465/j.cnki.jvs.2016.20.001
