日光节能温室卷帘机定位关键技术研究
2016-11-21王曦
王曦
(山西农机新技术服务中心,山西太原 030031)
日光节能温室卷帘机定位关键技术研究
王曦
(山西农机新技术服务中心,山西太原 030031)
日光节能温室是我国北方地区农作物冬季实现增产的关键措施之一,其中卷帘机的升降、天窗放风是实现其内部环境调控的重要措施,也是日常管理工作的主要内容。当前卷帘机的操作主要是人工操作,劳动强度大、费时费力且农作物不能及时得到有效合理的光照。卷帘机定位关键技术作为日光温室自动化控制系统的一个组成单元,通过研究利用角度传感器记录卷帘机运行位置的方法,提出了卷帘机运动位置控制模型,解决了日光温室模糊控制系统对卷帘机位置精准测量与控制的问题,为日光节能温室的产业化发展提供了科学的技术支撑。
日光节能温室;环境控制;角度传感器;卷帘机位置控制模型
0 引言
设施农业是综合应用工程装备技术、生物技术和环境技术,按照动植物生长发育所要求的最佳环境,进行动植物生产的现代农业生产方式。其中,日光节能温室作为一种简单易建的设施产业,成为我国北方地区广大农民增产增收的主要措施之一。长久以来,这种生产模式的管理方式主要依靠人工[1],不但费时费工、劳动强度大,而且卷闭帘时间完全凭经验,难以做到科学管理。近年来,随着财政政策支持和技术进步,日光温室覆盖保温材料的收放逐步被卷帘机所代替,虽然节省了时间,但人工劳动强度大的问题依然存在,尤其对于集群日光温室建筑,不能做到及时、合理、科学的管理。当前许多设施农业智能控制软件大多只用于联栋温室,应用于单栋日光节能温室的智能控制系统由于关键技术尚未解决,推广尚在初级阶段,其中卷帘机运动位置精准控制成为智能化控制系统迫切需要解决的首要问题。
1 研究思路与总体设计
该日光节能温室控制系统由上位机、485总线、智能终端、传感器组成,省去了复杂的电控箱,安装简单快捷,性价比大幅提升,成为适应日光节能温室信息化建设、自动化控制、数据化管理、产业化发展的新型控制软件系统。其工艺结构是温室的环境数据在传感器智能终端的采集下,通过485总线传输至装有虚拟控制软件的上位机,经过上位机的运算,控制整个温室系统装备的协调运行,创造适宜农作物生长的最佳生态环境。其中,对卷帘机的精准控制成为系统稳定运行的关键支撑。
目前,卷帘机的控制方式大多是电控式,即通过人工触发开关,驱动卷帘机的启停。为了防止卷帘机脱位,在卷帘机的上下分别安装2个限位器。这种控制方式由于存在安装线缆长、机械故障多等问题,并不适应智能化控制系统的需求。同时,由于笔者改进了现有日光节能温室的放风机构,省去了卷膜系统,实现了卷帘机覆盖、放风一体化作业。
放风口设计见图1。
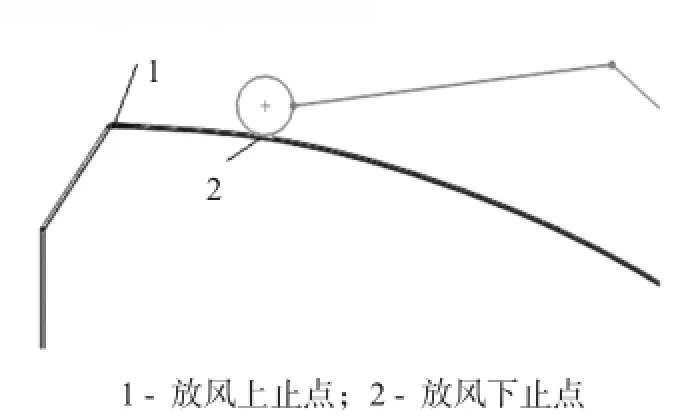
图1 放风口设计
该机构工作原理是卷帘机启动上升到位置2停止,位置1与位置2之间是放风区间,此区间是在模糊控制系统控制下卷帘机移动放风的工作空间,其结构简单、操作方便、效果明显。这种控制方式需要卷帘机运动位置的精确定位与其配合。
该研究设计思路是在卷帘机的上下支撑臂铰链和下支撑臂的活动支架处安装角度传感器,通过测量上下支撑臂角度的变化,确定卷帘机的水平投影,再通过曲线拟合确定卷帘机在棚面骨架上的精确定位,满足模糊控制系统对卷帘位置精确控制的要求。
2 卷帘机支撑杆系统的改进
当前,卷帘机的安装形式有侧置式、前置式、导索式3种[2],其共同特点是由卷帘机、支撑杆(索)、固定座和电控系统组成,通过固定支架固定卷帘机支撑杆,保持卷帘机定位,完成保温材料的铺放。本课题通过对固定座重新设计,安装活动支架同心装置,固定安装角度传感器,在卷帘机曲线运动带动下,活动支架旋转,带动角度传感器输出与卷帘机位置相对应的角度值。
支撑座设计见图2。
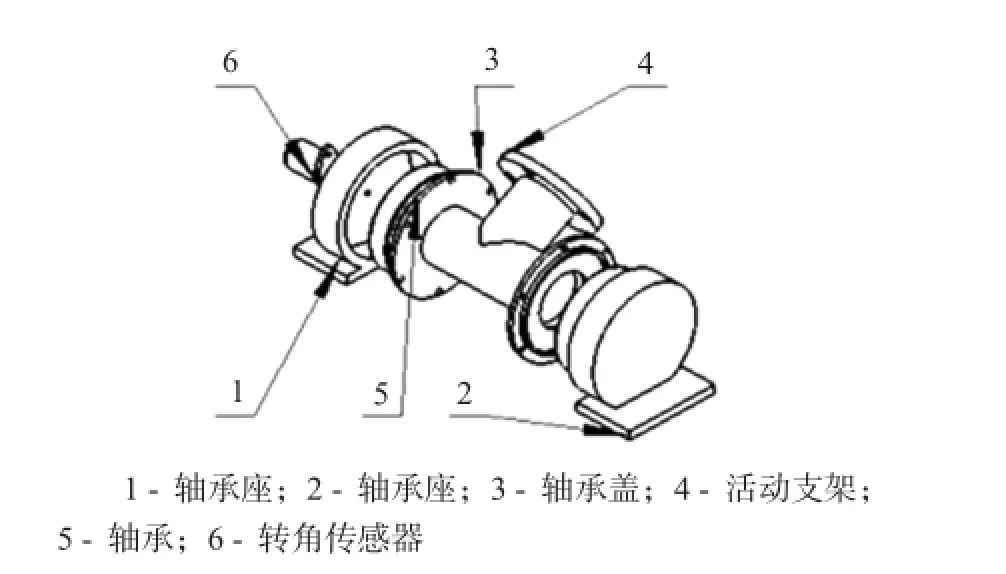
图2 支撑座设计
该固定座还设计有上限2个机械极限限位开关,满足卷帘机自身保护的需求。同时,在卷帘机上下支撑杆铰接处安装有另一角度传感器,该传感器能够输出上下支撑杆的夹角,该角度也与卷帘机在棚膜骨架上的位置相对应。该角度与转角传感器输出的角度值相配合,即可测定出卷帘机的精准定位。
3 卷帘机控制软件单元的设计
采用美国国家仪器公司National Instuments(简称NI)推出的Labview软件设计卷帘机控制软件。该软件作为一种图形化设计程序,能够非常方便开展嵌入式操作系统的设计,满足系统实时测量与控制、操作简单、易于升级扩展等需求[3]。
3.1 卷帘机位置角度检测原理
卷帘机定位原理见图3。

图3 卷帘机定位原理
随着卷帘机沿着骨架往复移动,上下支撑杆铰链夹角与下支撑杆和水平面的夹角将发生有规律的变化。由公式(1)可知,卷帘机在骨架上运动位置的水平投影与卷帘机支撑杆的角度具有以下相对应的关系,其中mnx即为卷帘机在骨架位置的水平投影。
mnx=(lsin(b-(90-α))+lcosa)-no. (1)
由上述分析可知,在卷帘机的运动过程中,如果能及时测量出支撑杆角度α和b的变化数值,就能准确确定卷帘机在骨架的位置。由于卷帘机骨架形状没有特定的函数来表示,因此需采用曲线拟合算法,求出温室骨架的拟合曲线函数,建立卷帘机位置与角度的函数关系。解温室骨架的拟合曲线的方法是,通过等距测量确定温室骨架的特征点数据。
卷帘机拟合采样数据见表1。
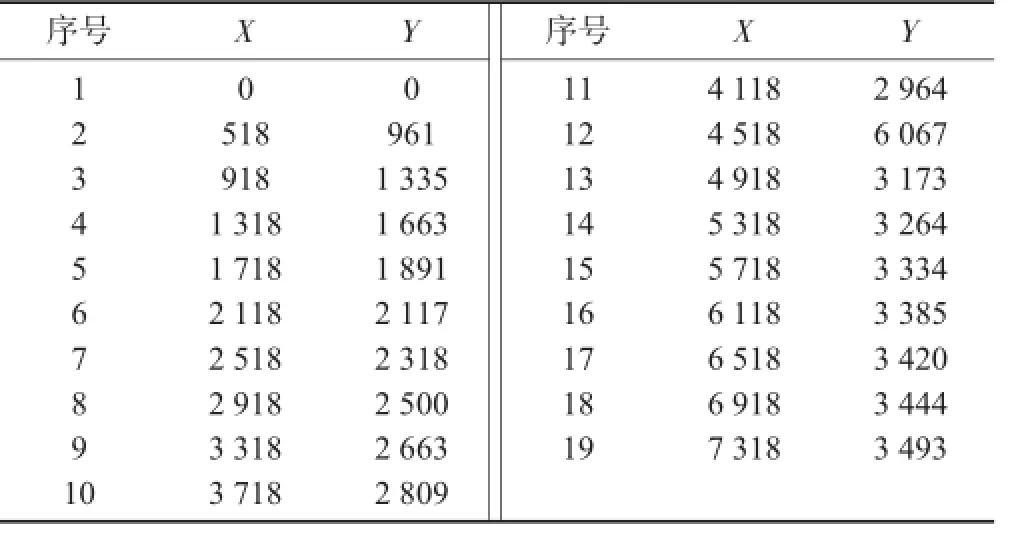
表1 卷帘机拟合采样数据
由表1反映了温室骨架上等距特征点在X轴、Y轴上的投影数据,通过Matlab数据分析软件,得出骨架的拟合曲线。当多项式次数确定为4时,曲线拟合近似度较高,残差平方和较小。
将结果代入公式(1),得出日光节能温室卷帘机运动位置控制模型,如公式(2)。
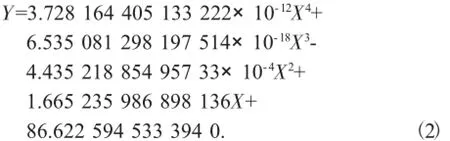
其中,X=(lsin(b-(90-α))+lcosa)-no.
3.2 硬件选型与软件设计
选用P3022-V1-CW360型角度传感器,该传感器是霍尔式非接触式,0~360°全角度,0~5 V输出,分辨率为12 bit。该传感器同心联接于活动支架,随支撑杆的摆动输出角度值和电压值,通过485总线智能终端采集输送至上位机。
该软件的设计功能是将传感器输出的角度值转化成卷帘机在水平的投影值,然后通过曲线拟合,得出卷帘机在棚膜骨架的精准(X,Y)数据,用于系统对卷帘机位置的精准判断。
4 控制系统的仿真与考核
卷帘机位置精准控制,是实现日光节能温室模糊控制的关键环节,卷帘结构的创新设计、设备的选型、软件的设计以及结果的可靠性通过以下试验考核其正确性。
4.1 设备模型的运动分析
在Solidworks三维设计软件环境下运行调试,简化建模。
Solidworks运动仿真见图4。
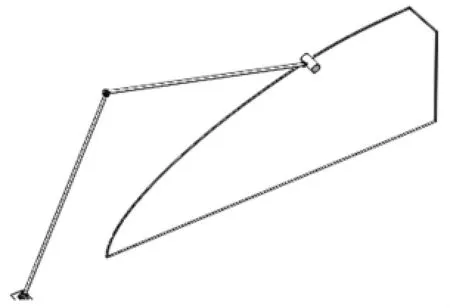
图4 Solidworks运动仿真
该模型由温室骨架、卷帘机、上支撑杆、下支撑杆、固定座和传感器总成组成。通过在模型的不同部位设置传感器,检测卷帘机随骨架运行的轨迹,分析角度传感器的变化规律,得出卷帘机运行与角度传感器角度变化的相应规律。
卷帘电机投影距离与角度输出关系见表2。
由表2可知,随着卷帘机运动开始,卷帘机水平投影距离,单项递增,但角度输出在初始阶段有个反向跳跃,原因在于骨架前倾设计有50~75°的前倾角,在卷帘机的运行初始阶段,支撑杆有个逆向运行过程,随后支架角度在35~20°变化。
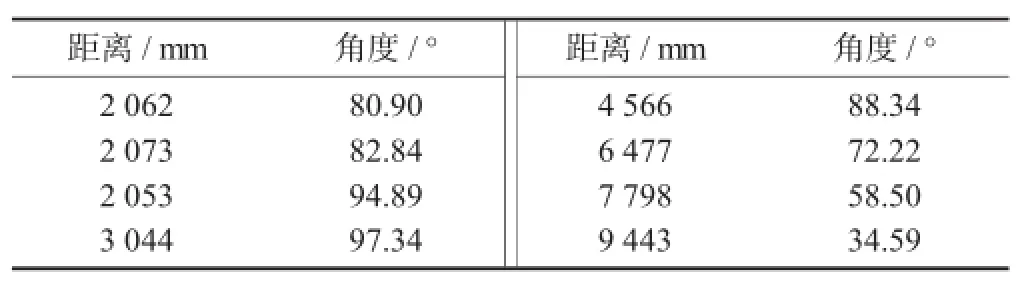
表2 卷帘电机投影距离与角度输出关系
4.2 软件的模拟分析
在工作实验台上配置角度传感器、485总线和上位机,设计软件分析界面。
手动模拟数据输出见图5。

图5 手动模拟数据输出
利用手动旋转角度传感器,观察系统软件的反应,结果显示,随着角度传感器的旋转,上位机角度显示数据不停地改变,加入位置转化代码后,能够清晰地显示卷帘机位置的变化,数据稳定、跳动不明显。
在试验台调试完成后,该装置进行了实际安装考核,安装地点为榆次东阳镇,大棚参数东西跨度30 m,南北跨度10 m,高3.5 m,钢架棚。实际运行过程中,卷帘机位置控制精准、数据显示平稳、跳动不明显、系统运行平稳,能够满足系统的运行需求,同时极限限位开关灵敏、动作迅速,能够满足设备的保护要求。
结果输出见图6。

图6 结果输出
5 结论
结合当前设施农业精准控制的要求,研究设计了日光节能温室卷帘机角度定位装置,解决了日光节能温室模糊控制系统对卷帘机位置精准测量与控制的要求,为日光节能温室的产业化发展提供了科学的技术支撑。
首先,对日光节能温室的放风装置进行了改进,利用与卷帘机棉被连接的膜充当放风帘,卷帘的同时放风,省去了专用卷膜放风装置,操作简单方便,节约了成本,对日光节能温室结构与智能化控制的发展完善具有重要的意义。
其次,将角度传感器应用到卷帘机位置测量中,提出了卷帘机位置控制模型,满足了智能控制系统对卷帘机定位的需求,结构简单、性能可靠。
再次,利用虚拟平台作为上位机设计软件,提高了程序设计效率,节省了大量的设备投资,简化了测量控制工艺,保障了系统运行的可靠性,是一款性价比突出的日光节能温室控制系统。
综上所述,本项目研究解决了智能控制系统中卷帘机位置测控问题。仿真与实际运行表明,采用的测量工艺合理先进、设计的程序安全稳定,系统的设计满足实际生产需求。
[1]张亚红,吴素平,付理,等.用于日光温室群体卷闭帘的智能控制系统:中国,200820128808[P].2009-08-12.
[2]丁小明.我国日光温室卷帘机技术现状分析 [J].农机化研究,2012(12):76-79.
[3]李春平,李颉思.基于LabVIEW的实时数据测量系统的设计 [J].微型计算机信息,2007(23):270-272.◇
Study on the Key Technology of Solar Greenhouse Shutter Position Control Model
WANG Xi
(New Technlolgy Service Center of Shanxi Agricual Mechanism,Taiyuan,Shanxi 030031,China)
The solar greenhouse is one of the key measures in northern China to achieve yield of winter crops.Where in the rolling machine movements,skylights leaked is an important measure to achieve its internal environmental regulation and the main content of the daily management.The current rolling machine operating mainly manual,labor-intensive,time-consuming and crops can not be effective and reasonable lighting.The issue as an integral unit in greenhouse automation and control systems,by studying the use of an angle sensor which can record the position of the shutter running method,proposes rolling machine motion position control model to solve the solar greenhouse fuzzy control system for rolling machines precise location measurement and control problems which can provide a scientific support for the industrial development of energy-saving solar greenhouse technology.
solar greenhouse;environment control;angle sensor;shutter position control model
S625.3
A
10.16693/j.cnki.1671-9646(X).2016.01.012
2015-12-29
2015年山西省财政支农物理农业技术装备试验示范项目(201506)。
王 曦(1973— ),男,本科,高级工程师,研究方向为农机信息化建设与农机新技术开发。
