模式匹配法水下目标定位仿真研究❋
2016-11-21罗新禹郝庆水曹建梅韩庆邦
罗新禹,郝庆水,曹建梅,韩庆邦,李 建
(1.河海大学物联网工程学院常州213022;2.中国科学院声学研究所声场声信息国家重点实验室,北京100190;3.山东迪生电气有限公司,济南250100;4.国网技术学院信息中心,济南250100)
模式匹配法水下目标定位仿真研究❋
罗新禹1,2,郝庆水3,曹建梅4,韩庆邦1,李建1,2
(1.河海大学物联网工程学院常州213022;2.中国科学院声学研究所声场声信息国家重点实验室,北京100190;3.山东迪生电气有限公司,济南250100;4.国网技术学院信息中心,济南250100)
匹配场处理是一种水声学和物理学相结合的信号处理技术,其在水下目标定位方面的高精度特点使得该方法受到广泛关注。匹配模处理是工作在模态空间的匹配处理方法。介绍了匹配模处理的基本原理,并通过仿真实现匹配模处理方法。通过对同一目标声源的定位,得到匹配模处理方法的性能优于匹配场处理方法。
水声学;信号处理;水下定位;匹配场处理;匹配模处理
1 引 言
传统的波束形成技术不适用于浅海环境,因为该技术没有考虑多途径传播以及海洋声场的复杂性。匹配场处理技术相对于传统的波束形成技术有着独特的优势。
自从Bucker[1]提出用匹配场处理方法对水下声源进行定位以来,匹配场定位方法便被广泛研究[2-5]。Fizell和Walves[6]首次运用MFP方法进行水下声源远距离被动定位。实验结果的误差优于常规的被动声呐测距。匹配场处理可以看成广义波束形成方法。匹配场定位的基本原理是通过比较拷贝场信号与实际接收信号之间的相关程度确定声源位置(深度、距离)的方法。由于匹配场处理方法使用了声压场的全部数据,其对环境失配很敏感。
匹配模处理方法[7-8]可以很好的克服环境失配对定位的影响。匹配模处理方法采用浅海波导中模态传播特性,从阵列接收到的数据推断模态幅度[9],并将测量的模态幅度和计算的模态幅度进行匹配。相对于匹配场处理方法,匹配模处理方法只使用声场中需要定位声源位置的数据(匹配场处理方法使用了全部声场数据),这样就可以减小环境失配对定位的影响。
文章分为四个部分,第一部分介绍声场模型的建立,本文使用简正波模型;第二部分介绍匹配场处理方法和匹配模处理方法的处理器;第三部分为两种处理方法的实验仿真;第四部分得出结论,并对未来研究做出展望。
2 简正波声场计算
假设海面和海底构成一个平行的平面层,层内介质均匀且边界是绝对边界。如果层的厚度是H,横轴r为距离,纵轴z为深度,这样的边界就可简化为在无穷远处行为可忽略。进一步假定,在层中所传播的简谐波对时间的关系为e-jwt,并且不考虑声源的激发状态,而只考虑层中波的一般行为,此时声源的奇性条件也可不予考虑。
用p表示声场,即p=p(x,y)e-jwt,则有波动方程:

在假设条件下,将上面的波动方程改写为:

运用物理方程有关求解方法,对分层介质在圆柱坐标系下可求得下列简正波声压场:

为了得到特征值kj与特征函数ψj(z),解深度方程:

利用数值分析求解,将二阶三点微分公式

带入上式,可得到下式:

其中,μ=k2h2,ψ=[ψ1,ψ2,ψ3,...,ψN]T

一旦声场的特征函数ψj(z)计算出来,就可以算出声压场的分布。
后面在进行匹配场及匹配模处理仿真时,将分别使用上述p(r,z)、kj、ψj(z)等简正波声场计算输出结果。
3 处理器
3.1匹配场处理器
常规的线性匹配处理器是目前适用最广泛的匹配场处理器。这种处理器直接将实测数据与拷贝场数据进行相关运算,它的输出定位模糊表面取相关幅度的平方。

线性处理器的输出由下式给出:a是归一化接受信号向量,R是垂直线列阵接受数据的采样协方差矩阵。
3.2匹配模处理器
匹配模处理器可以表示为:

ai是由接收阵得到的声场数据推断出来的模态幅度,si是第i个拷贝模态幅度。模态幅度ai和位于深度zi的声源的声压场有如下关系:

对于位于距离rs和zs深度的单声源:
ki是i个模态的水平波数,ψ(zs)是第i个模态的标准下正交实数模深度函数,αi如下:

在r=rs处,由式(3)可以得出拷贝模态幅度为:

实际上,圆柱型传播移除了距离和深度上的显示。为了不丢失大概,αi必须从式(10)中删掉。可以得到处理器:

4 实验仿真
匹配场处理大致可分三个步骤:
首先,使用水平水听器阵列或者垂直水听器阵列对声场信息进行数据采集,它一般是涵盖了信道特征和声源特征的声压场。
其次,选择已知的环境参数,如声速分布、海底地形等作为传播模型的输入参数进行声场建模,选定感兴趣的扫描区域并划分网格,对落在网格点上的假定声源进行声场计算,得到接收阵位置处的拷贝声压场。
最后,利用匹配场处理算法对实际测得的声场与建模获得的声场作相关处理,得到输出模糊度平面,无失配情况下,在真实目标位置处出现相关峰值,以此估计声源的距离和深度。
4.1匹配场处理方法仿真实验
采用如图1所示水下环境模型进行定位仿真,假设水深100m,声速1500m/s,下表层声速1600m/s,沉积层密度1.3g/cm3。采用8元垂直接收水听器阵列均匀分布在20~90m水深范围。

图1 水声环境
假设水下目标声源频率300Hz,距离37km,深度70m。声场搜索范围为:水平方向从30km到40km,垂直方向0m到100m,将声场划分为101* 1001网格,水平搜索步距0.01km,垂直搜索步距1m。由此得出模糊度平面如图2所示。从图中可辨别出声源位置为距离37km,深度70m,但干扰比较多。

图2 MFP水下目标定位
4.2匹配模仿真实验
匹配模处理方法的步骤和匹配场处理的方法步骤大致相同。匹配场处理器对声压进行相关处理得出模糊度平面,匹配模处理器对由声压分解出来的模态进行相关处理。两种定位方法处理的数据不同但原理相似。
采用图1所示的仿真环境。当频率为300Hz和500Hz时,简正波模式如图3。由图可见简正波的阶数由10阶增加到16阶。简正波的最大阶数由下式给出:

所以在海深H和声速一定的情况下,频率ω越高简正波的阶数就越多,相应的计算量越大,考虑到计算机的计算能力,所以简正波模型更适用与低频情况。
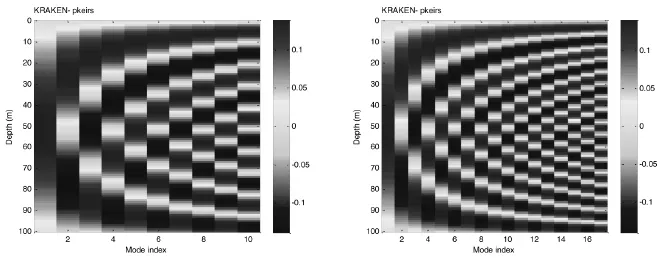
图3 频率300Hz和500Hz模式分布图
当声源频率为500Hz时,第1、3、6、9阶简正波模态随深度分布如图4。仿真没有发生环境失配,匹配模处理将所有模态用于数据处理。
假设水下目标声源频率500Hz,距离37km,深度70m。网格划分和搜索范围与匹配场处理相同。得出模糊度平面如图5所示。从图中可清晰的辨别出目标位置。

图4 频率300Hz时第1、3、6、9阶模态
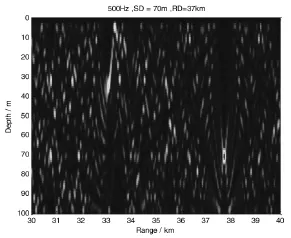
图5 MMP水下目标定位
5 结束语
分别实现了匹配场处理和匹配模处理的水下定位方法。通过两种匹配方法即匹配场处理和匹配模处理对同一目标声源的定位,对比图2和图4,可以得出结论:匹配模处理方法对目标的识别优于匹配场处理。但是需要指出,由于尚存在模型失配问题亟待解决,匹配场以及匹配模方式在水声定位领域的实际应用还有很长的路需要走。
[1]H.P.Bucker.Use of caculated sound fields and matched field detection to locate sound sources in shallow water[J].J.Acoust.Soc.Am.,1976,59(2):368-373.
[2]D F Gingras.Robust broadband matched-field processing:performance in shallow water[J].IEEE Journal of Oceanic EnGineering,1993,18(3):253-264.
[3]R K Brienzo,W S Hodgkiss.Broadband matched-field processing[J].J.Acoust.Soc.Am.,1993,94(5):2821-2831.
[4]J A Fawecett,M L Yeremy,N R Chapman.Matchedfield source localization in a range-dependent environment[J].J.Acoust.Soc.Am.,1996,99(1):272-282.
[5]C W Bogart,T C Yang.Source localization with horizontal arrays in shallow water:spatial sampling and effective aperture[J].J.Acoust.Soc.Am.,1994,99(3):1677-1686.
[6]R G Fizell,S C Walecs.Source localization in range and depth estimation using ambiquity function methodes[J].J.Acoust.Soc.Am.,1987,82(2):606-613.
[7]E C Shang.Source depth estimation in waveguides[J].J.Acoust.Soc.Am.,1985,77(4):1413-1418.
[8]T C Yang.A method of range and depth estimation by modal decopasition[J].J.Acoust.Soc.Am.,1987,82(5):1736-1745.
[9]P Hursky,W S Hodgkiss,W A Kuperman.Extacting modal structure from vertical array ambient noise data in shallow water[J].J.Acoust.Soc.Am.,1995,98: 2971.
Study on Simulation of Matched-mode Processing for Underwater Locating
Luo Xinyu1,2,Hao Qingshui3,Cao Jianmei4,Han Qingbang1,Li Jian1,2
(1.School of Internet of Things Engineering,Hohai University,Changzhou 213022,China;2.State Key Laboratory of Acoustics,Institute of Acoustics,Chinese Academy of Sciences,Beijing 100190,China;3.Disheng Electric Co.Ltd.,Jinan 250100,China;4.Information Center,State Grid Technical Institute,Jinan 250100,China)
Matched-field processing,combining with underwater acoustics and physics,is a signal processing technology and is popular as the characteristics of high precision underwater target localization.Matching-mode processing is a matched processing working in mode space.Its basic principle is introduced in this paper and the method is implemented by simulation.By locating the same target sound source,the performance of matched-mode processing is better than that of matched-field processing.
Underwater acoustics;Signal processing;Underwater location;Matched-field processing;Matching-mode processing
10.3969/j.issn.1002-2279.2016.01.017
TB56
A
1002-2279(2016)01-0068-04
❋国家海洋局南海维权技术与应用重点实验室2013年度开放基金(1306);声场声信息国家重点实验室2015年度开放课题(SKLA201504);河海大学中央高校基金项目(2011B11014,2013B18514);国家自然科学基金(11274091,61302124,11274092),淮安河海研究生院开放基金
罗新禹(1990-),男,安徽省滁州市人,硕士研究生,主研方向:通信与信息系统。
2015-04-27
