异步电动机可变负载降压节电器研究与设计❋
2016-11-21段明浩尹德扬莫华清张成远张金波
张 博,段明浩,尹德扬,莫华清,张成远,张金波
(1.河海大学能源与电气学院,南京211100;2.河海大学物联网工程学院,常州213022)
·微机应用·
异步电动机可变负载降压节电器研究与设计❋
张博1,段明浩2,尹德扬1,莫华清2,张成远2,张金波2
(1.河海大学能源与电气学院,南京211100;2.河海大学物联网工程学院,常州213022)
为了实现异步电动机在轻载或空载运行时,通过降低其工作电压达到节能经济运行的目的,从异步电动机的T型简化模型着手,对异步电动机的能耗进行了详细分析。采用控制晶闸管导通角的相控调压方式,引入功率因数角自整定PID控制算法,再结合电动机电流反馈,设计了一种异步电动机可跟踪负载的节电控制器。该控制器集自动跟踪负载,轻载节能和断相、过载、三相不平衡、逆相等多种保护功能于一体,且在电动机启动过程中可实现软启动功能,使启动电流小,机械冲击小,实现了一个控制器完成多种控制功能的目的。经在132KW1600T摩擦压力机上使用,节电率高达39%,节能效果明显。
异步电动机;可变负载;降压节电;晶闸管导通角;相控调压;软启动
1 引 言
国外在电机节能方面的研究要早于国内,主要集中在电机本体节能设计方面[1-2],在永磁电机设计和应用方面已经积累了丰富的经验,但是永磁电机的价格较高,在中国推广有一定难度。由于鼠笼式异步电动机结构简单且价格较低,尤其是与永磁电机比较,更具有价格优势,所以国内鼠笼式异步电动机的应用非常普遍,占整个电机市场的76.5%[3]。而国内用户在电机选型设计上,为了保证电机可靠工作均是采用“大马拉小车”,即电机的额定功率远大于负载的额定功率,造成电机在低效率下工作,所以近几年国内许多学者对鼠笼式异步电动机节能控制方面开始研究[4-8]。
2 异步电动机简化模型
图1为异步电动机的T型简化模型。
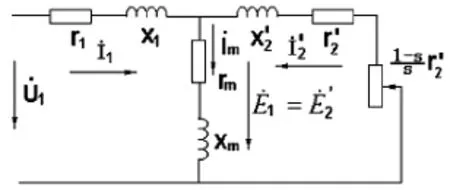
图1 异步电动机的T型等效电路
在电路中,r1、x1—定子绕组的电阻和漏电抗;—归算后转子绕组的电阻和漏电抗;rm、xm—与电子铁芯损耗相对应的励磁电阻和与主磁通相对应的铁芯磁路的励磁电抗;—定子电动势和等效后转子电动势;s—转差率。
异步电动机的几种典型运行状况:
(1)异步电动机的空载或轻载运行
1的相位差接近90°电角度,所以异步电动机空载运行时,功率因数很小。
(2)异步电动机在额定负载下运行
异步电动机带有额定负载时,额定转差率SN大约为5%,这时归算后的转子电路中总电阻r′2/s为归算后转子电阻r′2的20倍左右,这使归算后的转子电路基本上成为电阻性的,所以转子电路的功率因数较高。虽然定子电流由励磁电流和负载分量-(即归算后转子电流的负值)合成,定子功率因数取决于这两部分电流的滞后程度,但是在额定负载情况下,-比大很多,的电阻性程度起主要作用,因此定子的功率因数能达到0.8-0.85。由于额定负载时定子漏阻抗压降Z的影响不大,和相应的主磁通比空载时略小。
(3)异步电动机启动时的情况
异步电动机刚开始启动时,转子堵转,n=0,则s=1,代表机械负载的附加电阻,相当于电路短路状态。所以启动瞬时电流(即堵转电流)很大,而功率因数也较低。
3 异步电动机可变负载降压节电控制器设计
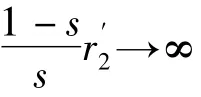
控制器硬件电路组成框图如图2所示。
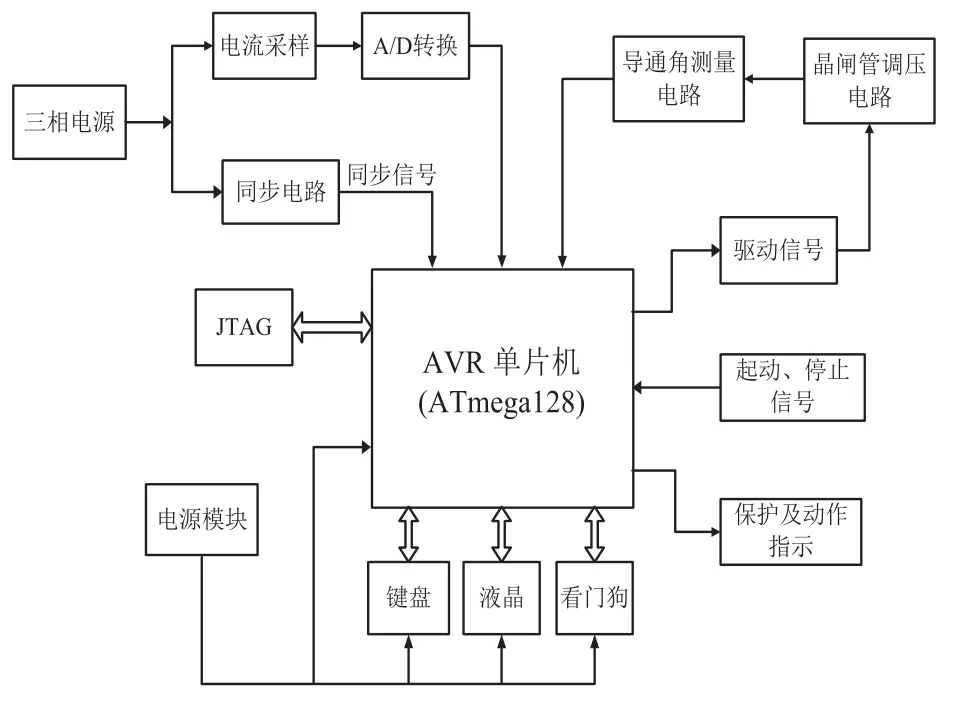
图2 控制系统硬件电路组成框图
3.1同步电路方案比较
同步信号可以利用光耦或稳压管两种方法来获取,即检测出交流电网的过零点。利用光耦获取的同步信号如图3(a)所示,图3(b)为实际波形图。
图3 利用光耦获取同步信号电路原理图
利用稳压二极管产生同步信号,如图4(a)所示,图4(b)为实际波形图。
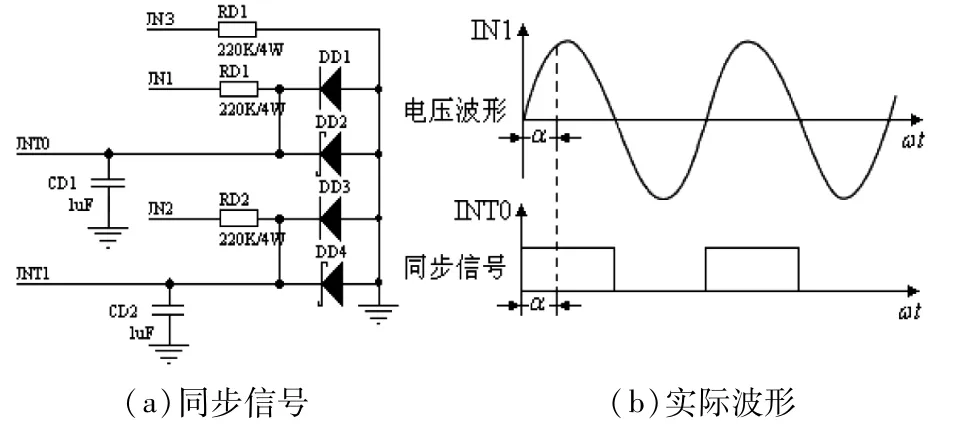
图4 利用稳压管获取同步信号电路原理图
上述两种同步信号获取电路的设计不需要同步变压器,线路简单,同时节省了成本。因此,通过比较,选用稳压二极管产生同步信号的方案。
3.2晶闸管触发电路
为了保证调压电路的可靠、稳定运行,晶闸管触发电路应当满足下列要求:①触发脉冲的宽度应当保证晶闸管能够可靠导通。②触发脉冲应该有足够的幅度,在户外寒冷场合,脉冲电流的幅度应增强为器件最大电流的3~5倍,脉冲前沿的陡峭度也需增加。③所提供的触发脉冲不超过晶闸管门极的电压、电流和额定功率的限定值,且在门极伏安特性的可靠触发区域内。④触发电路应具有良好的抗干扰性、温度稳定性及与晶闸管交流调压电路的电气隔离。
通过对交流调压原理的分析可知,触发脉冲的产生以同步信号为基准,当捕捉到A相同步信号以后,按VT1→VT2→VT3→VT4→VT5→VT6的顺序分别对六只晶闸管发送双窄触发脉冲,其脉冲时序图如图5所示。
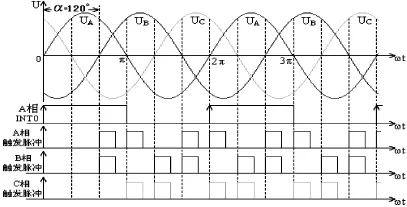
图5 双窄触发脉冲时序图
根据以上分析,设计的晶闸管驱动电路如图6所示,以A相为例,利用高速光耦MOC3052作为控制电路和晶闸管交流调压电路之间的隔离驱动器件。
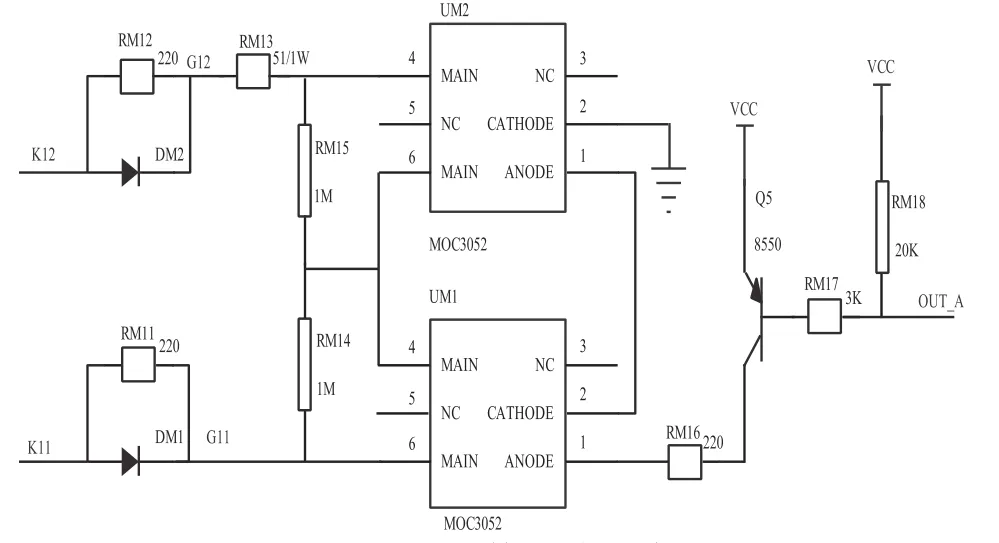
图6 晶闸管驱动电路
3.3晶闸管导通角测量模块
不借用仪表,直接测量系统的功率因数角是非常困难的,但通过分析可知,晶闸管的触发角α、导通角θ以及功率因数角φ三者之间是相关的,且三者关系为θ=π-α+φ。所以本设计采用通过测量晶闸管的导通角来间接测量功率因数角的方法,然后根据计算得出功率因数角φ,即:

以A相为例,晶闸管的导通角测量电路如图7所示。
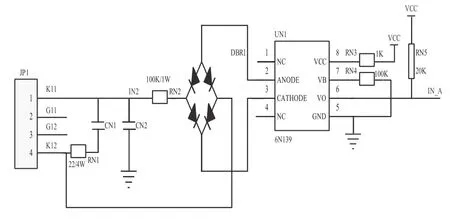
图7 晶闸管的导通角测量电路
在正弦交流信号的正半周,A相双向晶闸管承受正向电压,此时如果晶闸管的门极有触发信号,则A相双向晶闸管的正向管导通,反向管截止;在正弦交流信号的负半周,A相双向晶闸管承受反向电压,此时如果晶闸管的门极有触发信号,则A相双向晶闸管的正向管截止,反向管导通。当其中任何一个方向的晶闸管导通时,K11和K12两端电压为晶闸管压降,通常很小,经整流桥整流后不足以驱动光耦内部的发光二极管,所以输出端IN_A由VCC经上拉电阻RN3上拉成高电平。
如果晶闸管的门极没有触发信号,则双向晶闸管即使承受交流电压,也不会导通。此时K11、K12两端为A相交流电压,经整流桥整流后,单向导通,电流总是从光耦6N139的3脚流入,2脚流出,驱动其内部发光二极管,使光敏二极管导通,即光耦导通,IN_A端输出为低电平。
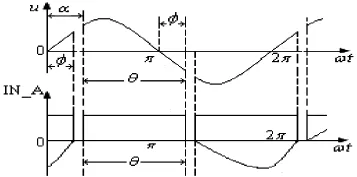
图8 晶闸管导通角波形
IN_A端输出波形如图8所示,当进行调压控制时,双向晶闸管在一个周期的正负半周各导通一次,所以IN_A输出周期为10ms的方波,且高电平时间对应晶闸管的导通时间,根据20ms对应360°,可换算出晶闸管的导通角θ。
3.4电流采样模块
以A相为例,电流采样电路原理图如图9所示。稳压管DA5起到限幅作用,保证采集到的输入电压不超过A/D转换芯片模拟输入端所允许的最大输入电压值。电容CA1、CA2起到滤波作用。
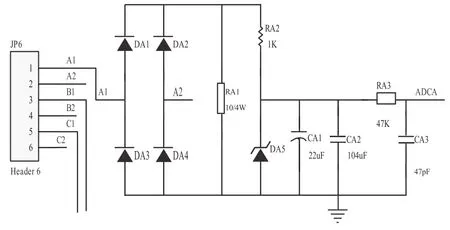
图9 电流采样电路原理图
4 试验研究及结果分析
在对控制器样机进行试验时所用的鼠笼式三相异步电动机型号为Y112M-4,具体电动机的参数为:额定功率PN=4kW,额定电流IN=8.8A,额定电压UN=380V,额定转速nN=1440r/min,额定效率ηN=84.5%,功率因数Cosφ=0.82。
表1为电机轻载时各测得量与计算量之间的关系,其中节电档次为控制器可设定参数,电压、电流、导通角和触发角为实测数据,其中导通角和触发角用对应的时间表示,换算关系为20ms→360°,功率因数、输出功率和节电率为计算所得。
从表1可以明显看到,随着节能率的提高,定子电压逐渐下降,导通角逐渐减小,触发角逐渐增大,工作电流明显减小,通过计算可得,功率因数显著提高,输出功率大幅降低,从而使得系统可以达到很好的降压节能效果。
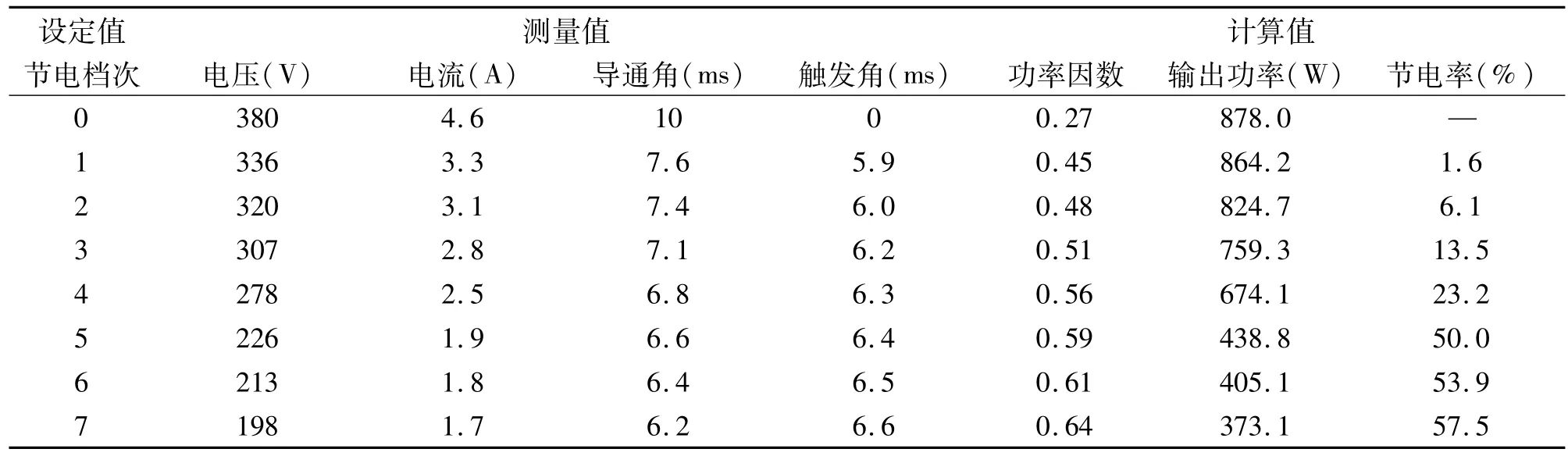
表1 电机节电率、电压、电流、导通角、触发角和功率因数之间的关系
5 结束语
利用上述原理设计异步电动机可变负载降压节电控制器,通过实际试验表明节电效果明显。在某实际运行中的132KW1600T摩擦压力机上进行了多次测试,节电率可达39%,且控制简单,成本低,运行稳定可靠。在交流异步电动机降电压节能控制中引入功率因数角自整定PID控制算法,再结合电动机电流反馈,可以达到非常好的控制效果。控制器集降压节能、软启动和断相、过载、三相不平衡、逆相等多种保护功能于一体,具有良好的应用前景。
[1]Kedous-Lebouc,Afef,Comut,et c.Punching Influnce on Magnetic Properties of the Stetor Teeth of all Induction Motor[J].Journal of Magnetism and Magnetic Materials,2003,12(03):12-14.
[2]韩春宝.异步电动机节能运行优化方案的研究[J].科技资讯.2007,11:88-89.Han Chunbao.Asynchronous motor energy saving optimization scheme of[J].information technology.2007,11: 88-89.
[3]Jiang Qian.motor industry characteristics and scale economic analysis of China[J].China market.2009,9:20-22.
[4]Modeling and electromagnetic loss reduction measures of squirrel cage induction motor of[D].Changsha,Hunan University,2013.
[5]Xing Zhi.Based on fuzzy control method of induction motor with light load step-down energy-saving control[J].Science technology and engineering,2010,10(6):20-22.
[6]Li Haolin,Li Ziqiang.Adaptive fuzzy control method for load[J].tool technology.2010,44 servo motor(03):59-61.
[7]Meng S.Zhao Z M,Wang X H.Research on design and analysis suitable for inverter-driven induction machine[D].Beijing:Tsinghua University,2000.
[8]Huanghui.Jiang Xuedong,Qiu Ruichang.The threephase asynchronous motor of three-phase AC tune pressure of soft starting and energy saving control[J].The locomotive electric transmission and 2005,4:10-12,15.
Research and Design on Energy-saving Variable Load Buck of Asynchronous Motor
Zhang Bo1,Duan Minghao2,Yin Deyang1,Mo Huaqing2,Zhang Chengyuan2,Zhang Jinbo2
(1.College of Energy and Electrical Engineering,Hohai University,Nanjing 211100,China;2.College of Internet of Things Engineering,Hohai University,Changzhou 213022,China)
In order to save energy and operate economically by lowering the operating voltage during the asynchronous motor running in light-load or no-load,this paper starts from its simplified model T and analyzes the energy consumption in detail,and designs an asynchronous motor variable load buck energy-saving controller which can automatically track the load.The power factor angle of self-tuning PID control algorithm,combined with the motor current feedback,is presented and the energy-saving controller is designed with the protection functions of light load and open phase,overload,three-phase unbalance and reverse phase.In addition,the soft start function is realized,in low current and mechanical shock,and achieve the purpose of a controller with a variety of control functions.The experiment shows that the power saving rate is as high as 39%on the friction pressure machine of 132KW1600T,and energy-saving effect is obvious.
Asynchronous motor;Variable load;Energy-saving;Conduction angle of the thyristor;Phase control;Soft start
10.3969/j.issn.1002-2279.2016.01.018
TP206
A
1002-2279(2016)01-0072-04
❋国家发明专利(异步电动机软启动及降压节能综合控制装置及其方法专利受理号:2015100036826);河海大学国家级大学生创新训练计划资助项目(201510294034)
张博(1995-),男,黑龙江省双城市人,本科生,主研方向:从事电工理论及电气设备检测技术的研究。
张金波(1967-),男,黑龙江省城市人,博士,主要从事输配电设备状态监测及节能产品的研究工作。
2015-04-29
