GNSS/INS深组合技术研究进展与展望
2016-11-20牛小骥班亚龙张提升刘经南
牛小骥, 班亚龙, 张提升, 刘经南
武汉大学 卫星导航定位技术研究中心, 武汉 430079
GNSS/INS深组合技术研究进展与展望
牛小骥, 班亚龙, 张提升*, 刘经南
武汉大学 卫星导航定位技术研究中心, 武汉 430079
在GNSS/INS组合导航领域,深组合是最深层次的组合方式,随着航空、航天、军事等应用对导航系统性能要求的提升,深组合技术逐步成为国内外研究的重点。通过对GNSS/INS深组合的技术起源与结构发展过程的梳理,总结出当前对深组合概念理解的两种立场。按照接收机环路跟踪结构与信息处理方式不同,将深组合结构分为标量深组合、相干矢量深组合以及非相干矢量深组合3种类型,其中相干矢量深组合又可以分为级联式和集中式两种结构。综述了国内外深组合技术的研究现状并指出了当前研究中存在的问题,最后结合实际应用需求对深组合的发展进行了展望。
GNSS/INS; 组合导航; 深组合; 结构分类; 矢量深组合; 标量深组合
全球卫星导航系统(Global Navigation Satellite System, GNSS)和惯性导航系统(Inertial Navigation System, INS)具有很强的互补特性,两者的组合可以取长补短,获得比单独使用任一系统时更高的导航性能,也因此GNSS/INS组合导航系统得到了越来越广泛的研究和应用。
GNSS与INS的组合通常分为3种模式:松组合、紧组合和深组合。其中,松组合是最简单的组合模式,GNSS与INS各自独立工作,并利用两者位置、速度信息进行数据融合;紧组合则相对复杂,根据GNSS接收机接收到的卫星星历信息和INS输出的位置、速度信息进行计算得到对应于INS位置的伪距与伪距率,然后再与GNSS接收机测量得到的伪距与伪距率组合。在松组合与紧组合模式中,GNSS的信息可以抑制INS误差的累积,当GNSS信号受遮挡而无法正常工作时,INS可以提供连续的导航结果[1]。
深组合除了可以完成松组合或紧组合的处理工作外,还利用INS的测量(加速度)或者导航信息(位置、速度)对接收机的信号跟踪进行辅助。深组合需要深入到接收机内部,涉及接收机的信号处理层次的融合,在结构或算法方面都比松、紧组合更加复杂,是GNSS与INS最深层次的组合方式。
在接收机中完成GNSS信号解调(捕获、跟踪)的核心环节是信号跟踪环路。环路通过不断鉴别本地复制信号与接收信号的差异,进而调节压控振荡器使得本地复制信号的频率/相位与接收到的信号趋于一致,实现信号的捕获/跟踪。然而,接收机的信号跟踪环路通常会受到多种误差源的影响,包括热噪声、晶振的不稳定性及载体动态等。在进行接收机设计时,为了保证接收机的动态性能就需要设置较大的环路带宽,然而越大的环路带宽通常意味着引入越多的环路噪声,也即牺牲了环路的抗噪声或者抗干扰性能甚至是灵敏度。反过来,为了获得更好的抗噪声或抗干扰性能就要减小环路带宽,这样环路的动态性能就会受到限制。如图1所示,传统接收机动态性能对带宽的要求与抗干扰、抗噪声性能对带宽的要求存在矛盾性,在进行接收机设计时只能折中考虑[2]。图1中:SNR为信噪比。

图1 环路性能与带宽设置的矛盾性Fig.1 Tradeoff between loop performance and bandwidth
GNSS/INS深组合技术可以有效地解决传统接收机跟踪环路设计中性能与带宽设置的矛盾问题。深组合利用INS测量的载体动态信息辅助GNSS接收机跟踪环路,可以大大减小环路承受的动态应力,因此即使在较高动态条件下,基于深组合技术的跟踪环也可以压缩环路带宽,降低环路噪声的影响,提高抗噪声抗干扰能力甚至灵敏度,充分发挥接收机的性能。
深组合技术的研究要求掌握组合导航与卡尔曼滤波技术,同时也要熟悉接收机设计技术,增加了深组合技术研究的难度[3]。尽管如此,GNSS/INS深组合带来的性能优势显示了其重要的研究价值,GNSS/INS深组合技术成为当前组合导航领域的前沿、热点与难点问题。
本文着重对GNSS/INS深组合技术进行介绍,第一节通过对深组合技术的起源与结构发展的历史过程进行梳理,总结出当前深组合概念理解的两种立场,并提出深组合结构的参考分类。第二部分对国内外深组合技术的研究概况进行介绍,并详细地介绍了深组合关键技术的研究现状。最后对当前深组合研究中存在的问题进行了总结并提出展望。
1 深组合的概念与结构分类
1.1 思想起源与概念确立
深组合是伴随着早期GPS系统的发展而逐渐产生和发展起来的一门技术,深组合从技术起源、结构发展到概念的确立经历了一个长期的历史过程,如图2所示。
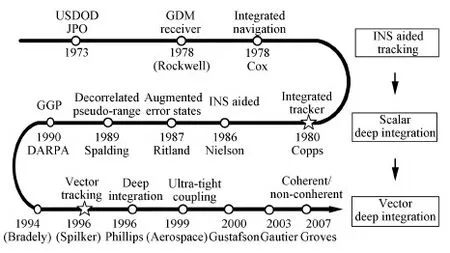
图2 GNSS/INS深组合概念的发展历程Fig.2 Development of GNSS/INS deep integration concept
1973年,美国国防部成立GPS联合项目办公室,计划实现全球卫星导航定位系统。在早期的接收机设计中就考虑使用惯性测量信息对接收机环路进行辅助,其中最为典型的是1976年Rockwell Collins公司研制的GDM (Generalized Development Model)接收机。由于当时还没有出现GPS/INS组合导航的概念,采用的方法主要是INS单方面对GPS环路进行辅助[4-5]。
1978年,Draper实验室的Cox首次全面详实地阐述了GPS与INS之间的互补特性以及将两者进行组合的优势;介绍了GPS/INS的组合方式与结构设计,包括松组合和紧组合,并指出在松组合和紧组合结构中,惯性导航系统的输出可以用于辅助GPS的捕获和跟踪[6]。
1980年,Copps等[7]对比了分散式和组合式跟踪/导航结构。其中分散式结构是指接收机各通道相互独立,每个通道包含独立的跟踪环路,导航卡尔曼滤波器利用通道提供的观测信息对INS速度误差进行估计,利用误差修正后的INS速度信息对各通道码跟踪环路进行辅助,这种结构可以提高接收机的动态及抗干扰性能。但是,当通道滤波器的滤波带宽小于卡尔曼滤波器的等效带宽,环路提供给卡尔曼滤波器的观测量的噪声不再相互独立,辅助结构可能会变得不稳定。
为了解决这一问题,Copps等提出了组合式跟踪/导航结构,组合导航滤波器将接收机所有通道相关器的输出信息和惯性测量单元(Inertial Measurement Unit, IMU)测量的载体动态信息融合并进行最优估计,然后利用估计的信息对IMU和GPS进行“控制”,这种设计改变了传统的接收机环路结构,各通道之间不再相互独立,没有了产生时间相关噪声观测量的分立环路,为解决分散式结构的稳定性问题提供了一种方案[7]。
1986年,Nielson等基于GPS/INS松组合结构,利用惯性辅助信息对接收机环路进行了辅助,并进行了飞行实测,结果表明在INS的辅助下,接收机环路在干扰环境下可以更好地跟踪信号[8]。
1987—1989年,Ritland和Spalding针对Copps文章中的分散式结构(INS辅助的传统独立环路结构)的稳定性问题进行了算法改进研究。Ritland首先针对环路的伪距观测信息与INS辅助信息相关(即卡尔曼滤波器观测量与状态量相关)的问题,提出了增广状态量方法,将环路跟踪误差建模并作为卡尔曼滤波器的状态量进行估计[9]。
Spalding针对通道滤波器的滤波带宽小于卡尔曼滤波器的等效带宽时,观测噪声具有较强的时间相关性问题,提出解伪距相关法,为卡尔曼滤波提供具有白化噪声的观测信息[10]。这些措施在一定程度上可以减少系统潜在的不稳定性问题,但由于没有对系统结构进行改进,并不能从根本上解决稳定性问题。
1990年, 美国国防高级研究计划局(Defense Advanced Research Projects Agency, DARPA)提出GGP(GPS Guidance Program)项目规划,设计惯性信息辅助传统接收机环路的GPS/INS组合系统,主要用于制导武器[11]。
从1980年至20世纪90年代初,这一时期INS辅助接收机环路的GPS/INS组合导航结构得到快速发展和应用。随后,一些学者逐渐发现Copps组合式跟踪结构的优势并相继展开广泛的研究。
20世纪90年代初,首先由Bradley大学的学者进一步发展了Copps的组合式跟踪思想,并尝试将这种跟踪方法用于接收机设计中[12]。
1996年,Spilker首次提出矢量跟踪(Vector Tracking)的概念,传统的接收机中,各信号处理通道之间是相互独立的,每一个通道各自包含完整的跟踪环路,然而由于视野中所有卫星信号是由同一接收机天线接收的,各通道信号之间并不是完全独立的。矢量跟踪环路打破原来的独立通道处理结构,利用所有通道的相关器输出信息组成的观测矢量对导航参数和环路参数进行估计,并统一对各通道数控振荡器(Numerically Controlled Oscillator, NCO)进行控制,仅包含一个闭合环路。相对矢量跟踪环,传统的环路结构则被称为标量跟踪环。Spilker在文中对矢量跟踪结构的优势也进行了总结,矢量跟踪结构具有更好的抗干扰和灵敏度性能,但抗差性能较差[13]。
同年,Draper实验室的学者在总结GPS/INS组合导航技术的特点时,第1次使用“深组合(Deep Integration)”这一概念[14]。
1999年,Aerospace公司提出一种基于两级(联邦/级联)卡尔曼滤波器的惯性辅助矢量跟踪环路的组合系统,并称之为“超紧组合(Ultratight Coupling)”[15]。
2003年,Gustafson和Dowdle在文章中指出,GPS/INS深组合应当基于矢量跟踪结构[16]。2003年,Gautier和Parkinson提出只要采用惯性信息对接收机信号处理进行辅助的组合结构都可以视为深组合[17]。2007年,Groves等根据环路是否采用非相干的鉴别器,首次将基于矢量跟踪环路的深组合进行了相干和非相干结构的划分[18]。
综上所述,深组合的发展依次经历了早期的INS单方面辅助接收机环路的结构,INS辅助标量跟踪环路的GNSS/INS组合结构,以及伴随着矢量跟踪方法的发展而产生的基于矢量跟踪环路的深组合等多个阶段。
由于不同的研究单位知识背景不同,对深组合的理解角度不同,导致深组合的概念至今都没有完全统一。目前在深组合研究领域,对深组合概念的理解主要存在两种立场,如图3所示。

图3 GNSS/INS深组合概念理解的两种立场 Fig.3 Two kinds of understandings of GNSS/INS deep integration
以麻省理工学院(MIT)或Draper实验室为代表的研究单位站在INS受辅助的角度,认为只有采用接收机环路最原始的相关器输出信息与INS组合的矢量跟踪结构才能定义为深组合[14,16];另一方面,以斯坦福大学为代表的研究单位则认为,只要采用INS信息对环路信号跟踪进行辅助的组合结构,都可以称之为深组合[17]。第1种立场对深组合的定义相较于第2种立场更为严格。
1.2 结构分类与特点
从1.1节内容可知,深组合的结构与概念的确立不是一蹴而就的,而是经过一个连续的发展过程。在这个发展过程中出现了多种结构形式,每种结构都对深组合的发展都起到了促进作用。因此在理解深组合的概念或定义时,应该综合考虑深组合发展过程中出现的所有结构。
图4给出了深组合系统的典型结构分类。深组合按照接收机跟踪环路结构的不同,可以分为标量深组合与矢量深组合两大类。
标量深组合在传统的松/紧组合结构的基础上,利用INS输出的高速率导航信息对接收机环路进行辅助,接收机各通道之间相互独立,如图5所示。
矢量深组合有时又被称为超紧组合[17]。矢量深组合以矢量跟踪环路为基础,所有通道的相关信息与INS测量信息一起通过组合导航滤波器对导航定位信息进行估计,然后利用估计的信息对环路跟踪进行控制,通道之间不相互独立,如图6所示。
标量深组合结构简单,不需改变传统接收机环路的基本结构,容易实现,各通道之间互不影响,抗差性好,但是存在组合导航滤波器与环路滤波器的串联,结构上存在潜在的不稳定因素[9-10]。矢量深组合基于矢量跟踪,实现了通道间的相互辅助,可以提高载噪比,对于短暂的信号中断不需重新捕获而保持连续跟踪。然而矢量跟踪需要对传统接收机结构进行大量改动,不易工程化实现。并且在矢量跟踪结构中,一个通道出现了问题会影响到其他所有通道,抗差性能较差[13]。
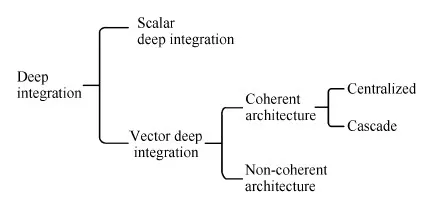
图4 深组合系统结构的典型分类 Fig.4 Typical classification of deep integration system architectures
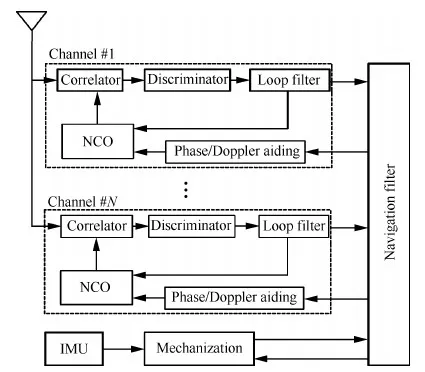
图5 GNSS/INS标量深组合结构 Fig.5 Scalar-based architecture of GNSS/INS deep integration
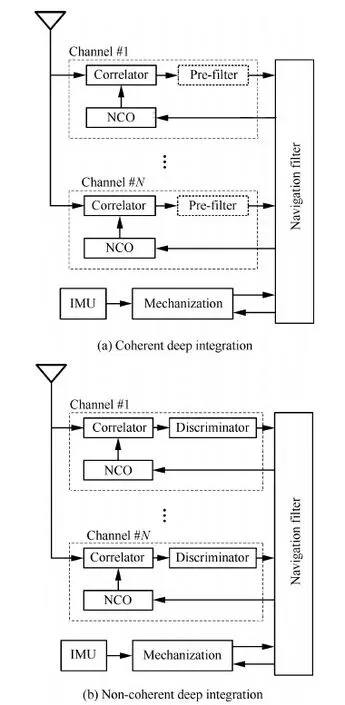
图6 GNSS/INS矢量深组合结构 Fig.6 Vector-based architecture of GNSS/INS deep integration
矢量深组合按照跟踪环路是否采用非相干鉴别算法又可以分为相干和非相干矢量深组合。
如图6所示,相干矢量深组合不包含非相干鉴别器或鉴别算法,可以避免将未建模的非线性测量误差引入到卡尔曼滤波器中,但要求对载波相位准确跟踪,可以获得比非相干结构更高的精度。非相干矢量深组合由于采用非相干鉴别算法,不需要准确的载波相位信息,并且在对码相位进行估计时不需要考虑载噪比是否足以保持载波跟踪,因此更适用于对弱信号进行跟踪或工作在复杂环境当中[18]。
相干矢量深组合根据各通道是否采用预滤波器又可以分为集中式矢量深组合和级联式矢量深组合。
如图6(a)所示,集中式结构仅采用一个组合导航卡尔曼滤波器集中处理所有通道的相关器输出信息,计算量大。级联式结构在每个通道设置预滤波器对相关器输出信息进行预处理。预滤波器的存在可以缓解组合导航滤波器的计算负担,相对于集中式结构更易工程实现[19]。
需要特别说明的是,矢量跟踪目前仅适用于对伪码相位和载波频率的准确跟踪,而无法独立完成对载波相位的准确跟踪。相干深组合在实际设计时仍需要采用标量跟踪环路对载波相位进行跟踪[20]。
表1对上述典型深组合结构的主要特征进行了总结。一些学者对不同深组合结构的性能进行了对比评估,一些学者从卡尔曼滤波算法出发,推导了级联式与集中式两种结构的等价性[21];也有学者利用仿真数据对比评估了级联式相干结构与两种非相干结构的性能,结果显示3种结构的定位与抗干扰性能并无明显差异[22]。但是到目前为止还没有文献对标量深组合与矢量深组合结构的性能进行系统地对比分析,并给出两种结构性能优劣的明确结论。
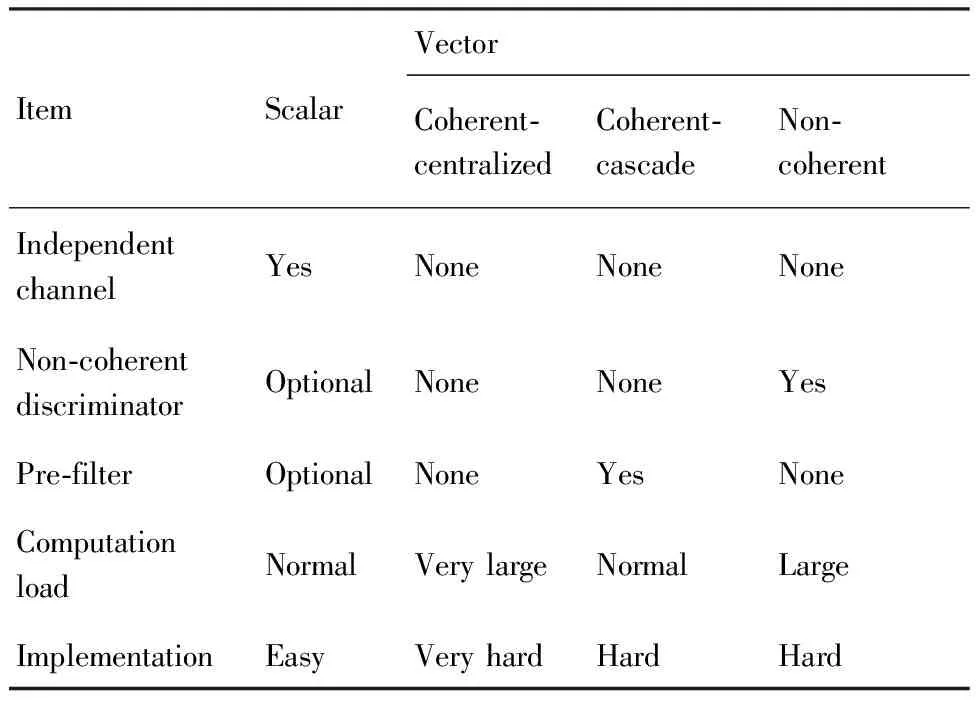
表1 深组合典型结构特点Table 1 Typical features of deep integration architectures
2 深组合研究现状
深组合技术从产生到现在,已经历了几十年的发展,得到了国内外的广泛关注和研究。图7对400余篇国内外深组合技术相关研究文献进行了统计,反映了国内外深组合技术研究公开发表文献数量的逐年变化情况。从图7中可以看出,国外关于深组合的研究起步较早,深组合的技术起源可以追溯至20世纪70年代中后期,2004—2011年前后,国外深组合研究达到了一个高峰时期。
从研究过程看,国外深组合研究经历了以军方为主导,到军民共同研究,再到百家争鸣、百花齐放的过程。从方法论上看,国外深组合研究形成了从“需求分析”到“结构设计”,再到“仿真验证”与“系统实现/性能评估”,最后对深组合的应用进行推广。
国内关于深组合的研究最早始于20世纪90代初,研究的主力是大学和研究院所,主要针对标量深组合进行了一定研究[23-24]。由于当时国内对接收机技术的了解或掌握程度有限,客观上限制了深组合技术的研究和发展。20世纪90年代末到2006年,国内深组合研究鲜有文献发表,直到2007年前后深组合才重新在国内获得关注,从2010年至今,国内关于深组合的研究进入了高峰期。但是目前国内深组合研究仍主要停留在系统结构设计与仿真验证阶段。
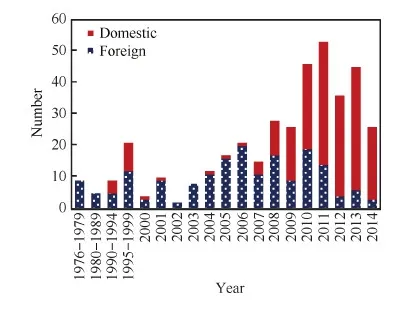
图7 国内外深组合研究公开文献数量统计结果Fig.7 Statistical results concerning the number of domestic and foreign literature of deep integration
深组合发展的几十年中,国内外学者对深组合技术进行了大量的研究,下面将依次从深组合系统的模型、系统的主要性能以及深组合系统的实现等方面对深组合技术的研究现状进行介绍。
2.1 深组合系统模型
深组合的系统模型研究分为两大类:一类是深组合系统的滤波算法研究,一类是深组合系统的数学建模研究。深组合系统的滤波算法研究主要针对矢量深组合结构。对于标量深组合系统,组合导航滤波器设计与普通的松/紧组合基本一致,在此不再赘述。不同结构的矢量深组合系统则需要进行不同的滤波器设计。
深组合系统的数学建模研究则主要针对标量深组合系统,以标量跟踪环路的模型为基础,建立惯性信息辅助环路的数学模型,进而可以对误差源的影响进行量化分析。
1) 矢量深组合滤波算法
相干矢量深组合包括集中式矢量深组合与级联式矢量深组合两种结构。
对于集中式矢量深组合,环路相关器输出的高速率I/Q信息(最少50 Hz)直接作为组合导航滤波器的观测信息,并且由于观测信息与被估计的状态量之间通常是非线性关系,需要考虑非线性滤波设计[25]。
对于级联式矢量深组合,算法研究的重点在于通道预滤波器的设计,每个预滤波器通常至少包含3个状态量:码相位跟踪误差、载波频率跟踪误差和载波相位跟踪误差,预滤波器的输出分别对应伪距差和伪距率差更新值,随后这些更新值再作为组合导航滤波器的观测信息[19]。
在非相干矢量深组合中,环路I/Q信息直接通过非相干鉴别器或鉴别算法计算码相位与载波频率偏差,随后这些偏差经比例求和运算得到低速率的伪距差、伪距率差信息,再作为组合导航滤波器的观测信息[18,26-27]。
2) 标量深组合数学建模
标量深组合数学建模研究方法主要包括功率谱密度法和Laplace域模型分析法,两种方法均以深组合系统的传递函数为基础。
功率谱密度法利用系统传递函数和误差源的功率谱密度函数求解各误差源引起的环路误差的均方差。斯坦福大学与明尼苏达大学对该方法进行了深入的研究,在文献中给出了详细的误差源模型与误差源影响的量化分析[28-29]。功率谱密度方法可以对误差源影响进行定量分析,尤其是针对接收机误差源。目前该方法对惯性辅助信息误差的建模停留在多普勒频率或者速度误差这一层次,尚缺少对惯性辅助信息误差源的建模和定量分析研究。
Laplace域(或s域)模型分析法以接收机环路的s域模型为基础,加入惯性辅助信息前馈支路模型,利用系统传递函数对环路的误差特性进行分析。由于传统接收机标量跟踪环路的s域模型研究已经比较成熟,该方法的研究重点在于对惯性辅助环节进行s域建模。

2013年,张提升对惯性辅助环节进行了细化建模,考虑了一般动态条件下惯性器件的零偏、比例因子误差以及辅助信息时延等误差源,并分析了普通动态条件误差源影响的量化结果[32]。但文章仅对静态和一般动态下的误差源进行了建模和分析,缺乏对高动态条件下一些误差源影响的建模和分析。
在进行深组合系统设计时,基于深组合数学模型的量化分析可用以系统性能评估,指导惯性器件和晶振选型以及环路参数优化等。深组合系统数学模型研究具有重要的理论指导意义,需要进一步深入研究。
2.2 深组合系统性能
GNSS/INS深组合可以提高系统多方面的性能,在深组合系统结构设计以及系统模型的基础上,利用仿真手段或者实测数据可以进一步对深组合性能进行评估测试。深组合系统的性能研究主要包括对系统高动态、抗干扰、灵敏度性能以及器件等级对性能的影响等方面。
1) 深组合系统高动态性能
在深组合系统中,惯导对载体动态的测量可以预测接收机与卫星之间的相对运动,接收机需要承受的动态应力大大减小,环路就可以稳定工作在较高的动态条件下。
目前,国外对高动态深组合技术的研究主要是针对军事应用,例如高冲击力(2 000g)的炮射弹药制导[33],再入式飞行器制导(10g~100g)等[34],总体来说公开的资料较少。国内一些学者对高动态性能进行了一定的研究[35-37],采用软件仿真的方法,场景设置简单,缺乏较为详细的实验描述,研究结果尚无法为实践提供可靠的指导。
2) 深组合系统抗干扰性能
深组合系统利用惯性辅助信息辅助接收机跟踪环路,可以压缩环路带宽,减小环路噪声,提高载噪比,进而提高系统的抗干扰性能。
1976年,Hemesath和Hutchinson利用建立的INS辅助环路的s域模型进行的量化分析表明,在高等级INS辅助下,系统的抗干扰能力可以提高10~15 dB[5]。
1999年,Raytheon公司基于级联式矢量深组合结构,采用低等级的激光惯导可以在70~75 dB 干信比条件下得到高质量载波相位观测值和稳定的码环跟踪[38]。
2000年,Draper实验室的Gustafson等采用蒙特卡罗仿真方法对非相干深组合的抗干扰性能进行了评估,结果表明,采用MEMS (Micro-Electro-Mechanical System) IMU (10 (°)/h),非相干矢量深组合相比于传统的紧组合,抗干扰能力提高15~20 dB[39]。
2007年,Kim等使用Spirent仿真器和低端IMU仿真数据对矢量深组合进行了研究,结果表明深组合系统的抗干扰性能提高了10 dB[40]。
2011年,Park等使用GPS/INS组合导航的速度信息对接收机进行辅助,测试结果显示使用速度辅助可以有效减小环路带宽,增强了系统的抗干扰性能[41]。
此外,Areospace公司、L3通信公司和美国遥感中心等单位也对深组合系统的抗干扰性能进行分析[15,27,42]。
国内对抗干扰性能的研究主要集中于军事院校[43-44],通过仿真对深组合系统的抗干扰性能进行了评估,研究相对较少。
目前,关于深组合系统的抗干扰性能研究比较成熟,得到的结论基本一致,即深组合系统相对于普通接收机或无辅助的组合导航结构,抗干扰性能可以提高10~20 dB。
3) 深组合系统灵敏度性能
在惯性辅助信息作用下,接收机压缩环路带宽,减少环路噪声,同时为延长相干积分时间提供了可能,进而可以提高跟踪灵敏度。
俄亥俄大学的Soloviev等对深组合系统的灵敏度性能进行了长期的系统研究。Soloviev等基于矢量深组合结构与低等级IMU,实现了城市峡谷环境15 dB-Hz弱信号的载波跟踪,并获得了高精度(厘米级)的载波测量[45-47]。
2006年,Gao和Lachpelle基于惯性辅助的紧组合结构,设计了CO-OP (Co-operated)跟踪环路,并进行了动、静态仿真测试,结果显示在25 dB-Hz弱信号环境下,可以实现稳定跟踪并保持载波相位锁定[48]。
2008年,Petovello等基于级联式矢量深组合结构与战术级IMU (1 (°)/h),使用软件接收机对实测数据进行后处理分析,结果表明,相对于传统接收机,深组合接收机灵敏度提高了7 dB,并发现延长相干积分时间对灵敏度性能的提升并没有预期的那么明显[49]。同年,Chiou等模拟赤道电离层闪烁场景,仿真汽车级的IMU (10~200 (°)/h)数据辅助标量跟踪环路。多普勒辅助的相干跟踪环路可以跟踪30 dB-Hz的信号,而多普勒辅助的非相干环路则可以跟踪22 dB-Hz的信号[50]。
2009年,Pany等采用多传感器辅助的深组合系统,并使用Aided-GNSS方法,采用软件接收机处理分析,得出在跟踪模式下,相干积分时间在动态和静态模式下分别可以延长至2 s和10 s[51]。
2010年,Soloviev和Dickman使用商业级IMU (100 (°)/h)辅助接收机环路,采用1 s相干积分时间,实现了室内15 dB-Hz弱信号的稳定跟踪并取得厘米级载波相位量测信息[52]。
目前,国内关于深组合系统的灵敏度性能研究较少,多采用数学模型进行理论分析或仿真测试,仿真条件及器件特性描述过于简单[43,53-54]。
4) 器件等级对系统性能的影响
在INS的辅助下,接收机跟踪环路的主要误差项从载体动态引起误差转变为INS估计误差和晶振误差。接收机的晶振是接收机的频率基准信号的来源,直接影响接收机性能,晶振器件等级的影响在接收机技术中已经充分研究,此处不再赘述。惯性器件的等级则影响INS辅助信息的质量,进而会影响深组合系统性能。
2003年,Gautier和Parkinson在斯坦福大学的组合导航系统评估平台上测试了不同精度IMU对跟踪环路的辅助效果,结果在显示导航级IMU (陀螺零偏<0.01 (°)/h)辅助下,环路带宽可以压缩至2 Hz,基于汽车级IMU (陀螺零偏100 (°)/h)提供的辅助信息只会导致环路不稳定[17]。同年,Alban等采用功率谱密度法对标量深组合误差源进行定量分析,得出的结论认为在GPS对INS误差的连续修正作用下,低等级的IMU和普通温补型晶振(Temperature Compensated Crystal Oscillator, TCXO)可以改善环路性能,仿真显示辅助后环路噪声抑制能力提高了14 dB[31]。
2004年,Chiou等专门针对晶振和IMU器件的等级对深组合系统的影响进行分析,车载实测数据后处理结果显示当GPS结果质量较高且连续对INS的误差进行修正时,IMU器件等级并不影响多普勒辅助信息精度,使用TCXO可以压缩环路带宽至3 Hz,使用恒温晶振 (Oven Controlled Crystal Oscillator, OCXO)则可以压缩至1 Hz[55]。
2007年,Watson等分别通过实测和仿真数据分析认为,晶振和IMU等级均会影响环路相干积分时间长度[56]。
2011年,Kiesel等针对IMU等级对深组合系统的影响进行了仿真测试,得出高等级(0.005 (°)/h),MEMS(8 (°)/h、30 (°)/h)IMU分别可以实现12、16和20 dB-Hz信号跟踪[57]。
同年,JAXA (Japan Aerospace Exploration Agency)的Tsujii通过机载数据分析指出,使用OCXO和TXCO对标量深组合系统性能影响不大,并且在GPS连续修正作用下,使用MEMS和导航级的IMU(<0.01 (°)/h)对环路进行辅助的系统性能相近[58]。
2014年,班亚龙等对标量深组合系统进行了细化建模,定量分析结果表明,在卫星导航系统对INS的连续修正/辅助作用下,低等级MEMS器件可以用于深组合系统[59]。
上述研究现状表明,不同研究单位采用不同研究平台,在不同测试条件下评估了器件等级对深组合系统性能的影响,得出的结论也有所差异。但是目前可以确定的结论是,在GNSS系统连续修正作用下,低等级的MEMS IMU可以用于深组合系统,使用OCXO比TCXO可以获得更好的系统性能。
2.3 深组合系统的实现
深组合系统的实现包括软件实现和硬件实现两种方式。软件平台相对灵活,便于深组合算法的研究,硬件系统开发周期长、灵活性差,但具有重要的军事意义和商业价值。
目前国外基于软件接收机平台的深组合实现研究比较完善,例如卡尔加里大学PLAN组研发的GSNRx、德国IfEN的ipexSR。国内如国防科技大学、北京航空航天大学等也进行了软件实现的研究。
国外对深组合系统的硬件实现比较早,如表2 所示,国外从20世纪90年代起就将深组合技术广泛地应用于军事武器平台,例如SLAM导弹(Standoff Land Attack Missile)的中程制导[60]、国防部GGP项目[11]、再入式空间飞行器[34]、单兵导航系统(Personal Navigation System, PNS)[61]等。
随后一些公司也陆续推出了一体化深组合商业产品,如Litton公司的LN25x和LN27x系列[62-63],Honeywell与Rockwell联合研制的IGS系统[64],NovAtel和KVH推出的CNS5000[65],以及英国Goodrich公司研制的SiNAV系统[66]。此外,Stanford大学、美国遥感中心、加拿大TPI公司等也推出了深组合硬件平台[67-69]。
国内有关深组合硬件实现的文献报道较少,与国外相关研究存在较大的差距。2013年武汉大学设计完成了一体化实时标量深组合系统[32];国防科技大学在2013年北斗卫星导航年会上展出了基于北斗和MEMS IMU的深组合系统。
表2深组合系统硬件实现研究现状
Table2Researchprogressonhardwareimplementationofdeepintegrationsystem

YearCountryInstitutionDeepintegrationsystem1986USAMcDonnellDouglasSLAMGuidanceSystem1990USADARPAGGP1990USADraperMMIMU2001USADODDIGNU2002USAHoneywellE⁃SIGI2002USAL3/IECTRUNAVTM2002USADraperSoldierPNS2001USAHoneywell,RockwellIGS2003USAStanfordUniversityGIGETPlatform2007USACRSUTCforTSPI2007USAQinetiQLtd.HardwarePrototype2008Canada/USANovAtel&KVHCNS50002011BritainGoodRichSiNAV2013CanadaTPIHardwarePrototype2013ChinaWuhanUniversityHardwarePrototype2013ChinaNationalUniversityofDefenseTechnologyHardwarePrototype
3 深组合研究存在的问题与展望
深组合导航技术的优势使其成为组合导航技术研究和发展的焦点之一。
国外深组合技术起步早,尤其是以美国为代表的国家已经完成对深组合系统结构设计的探索,对深组合系统性能进行了系统评估,并于20世纪90年代就已将深组合技术应用于各种制导武器当中。当前国外已逐渐减少了深组合技术相关研究,近年的少量文献主要是深组合技术在军事领域之外的应用探讨,包括复杂环境(遮挡,城市峡谷)接收机性能[47,70-72]、移动测图[73]以及尝试将深组合技术来实现室内外无缝定位[74]等。
国内关于深组合技术的研究起步较晚,整体研究仍停留在系统结构设计和仿真验证阶段,还有很多问题亟待解决:
1) 深组合系统结构与滤波算法研究。系统结构与算法设计是系统实现的基础,国外对深组合结构与算法研究较为系统,但是公开的文献中提供的实现方案缺乏实现细节,难以直接参考,需要自主深入研究。
2) 深组合系统数学模型研究。深组合系统研究需要一套系统的理论模型,目前已经提出较为细化的惯性辅助环路数学模型,需要进一步完善高动态条件下的误差源的建模分析。
3) 深组合系统性能研究。国外关于深组合高动态性能研究公开文献较少,对复杂环境下的系统性能研究深入,而国内相关研究较少。
4) 深组合系统实现。国外早在20世纪90年代就已将深组合技术应用于军事武器,并发展出多款商业一体化深组合导航系统产品。国内直到近年才开始出现深组合原理样机,且基本都是面向科研需求,无法满足工程化和产品化要求。
国内在进行深组合技术研究时,可以结合国内的实际应用需求,发挥深组合系统的性能优势,例如:
1) 随着北斗全球导航定位系统的建设,发展基于北斗接收机的深组合技术,实现深组合技术的本土化。
2) 发展基于MEMS惯性器件的深组合系统,MEMS器件的使用可以大大降低系统的设计成本,拓展深组合的应用范围。
3) 深组合技术可以潜在提高接收机的量测精度,尤其是动态条件下的量测信息精度。例如高铁轨道的动态精密测量、强地震时的环路跟踪精度提高。
[1] 艾伦, 金玲, 黄晓瑞. GPS/INS组合导航技术的综述与展望[J]. 数字通信世界, 2011, 2(2): 58-61.
AI L, JIN L, HUANG X R. Overview and prospect of GPS/INS integrated navigation technology[J]. Digital Communication World, 2011, 2(2): 58-61 (in Chinese).
[2] 谢钢. GPS 原理与接收机设计[M]. 北京: 电子工业出版社, 2009: 278-281.
XIE G. Principles of GPS and receiver design[M]. Beijing: Publishing House of Electronics Industry, 2009: 278-281 (in Chinese).
[3] KAPLAN E, CHRISTOPHER H. Understanding GPS: Principles and applications[M]. Boston: Artech House, 2005: 366-368.
[4] PARKINSON B, POWER S. The origins of GPS[J]. GPS World, 2010, 21(6): 1-43.
[5] HEMESATH N B, HUTCHINSON W M. Anti-jamming characteristics of GPS/GDM[C]//Proceedings of 1976 National Telecommunications Conference. 1976: 41.6-1-41.6-5.
[6] COX D B. Integration of GPS with inertial navigation systems[J]. Navigation, 1978, 25(2): 236-245.
[7] COPPS E M, GEIER G J, FIDLER W C, et al. Optimal processing of GPS signals[J]. Navigation, 1980, 27(3): 171-182.
[8] NIELSON J T, SWEARINGEN G W, WITSMEER A J. GPS aided inertial navigation[J]. IEEE Aerospace and Electronic Systems Magazine, 1986, 1(3): 20-26.
[9] RITLAND J, SPALDING K. Impact of inertial system quality on GPS-inertial performance in a jamming environment: AIAA-1987-2594[R]. Reston: AIAA, 1987.
[10] SPALDING K J. Advanced GPS-inertial integration concepts: AIAA-1989-3501[R]. Reston: AIAA, 1989.
[11] HOMER W C. An introduction to the GPS guidance package (GGP)[C]//Proceedings of the Fifteenth Biennial Guidance Test Symposium. DTIC, 1991: 1-4.
[12] SENFFNER D, SENNOTT J W. Navigation receiver with coupled signal-tracking channels: United States Patent 5343209[P]. 1994-08-30.
[13] SPILKER J J. Fundamentals of signal tracking theory[J]. Progress in Astronautics and Aeronautics, 1996 (163): 245-327.
[14] PHILLIPS R E, SCHMIDT G T. GPS/INS integration[C]//Proceedings of System Implications and Innovative Applications of Satellite Navigation. 1996: 9-1-9-18.
[15] ABBOTT A S, LILLO W E. Global positioning systems and inertial measuring unit ultratight coupling method: United States Patent 6516021[P]. 2003-02-04.
[16] GUSTAFSON D, DOWDLE J. Deeply integrated code tracking: Comparative performance analysis[J]. Proceedings of International Technical Meeting of the Satellite Division of The Institute of Navigation, 2003: 2553-2561.
[17] GAUTIER J, PARKINSON B. Using the GPS/INS generalized evaluation tool (GIGET) for the comparison of loosely coupled, tightly coupled and ultra-tightly coupled integrated navigation systems[C]//Proceedings of the 59th Annual Meeting of the Institute of Navigation and CIGTF 22nd Guidance Test Symposium. Manassas, VA: ION, 2003: 65-76.
[18] GROVES P D, MATHER C J, MACAULAY A. Demonstration of non-coherent deep INS/GPS integration for optimized signal-to-noise performance[C]//Proceedings of the 20th International Technical Meeting of the Satellite Division of the Institute of Navigation. Manassas, VA: ION, 2007: 2627-2638.
[19] PETOVELLO M, LACHAPELLE G. Comparison of vector-based software receiver implementations with application to ultra-tight GPS/INS integration[C]//Proceedings of the 19th International Technical Meeting of the Satellite Division of the Institute of Navigation. Manassas, VA: ION, 2006: 1790-1799.
[20] PETOVELLO M, O’DRISCOLL C, LACHAPELLE G. Ultra-tight GPS/INS for carrier phase positioning in weak-signal environments[C]//Proceedings of NATO RTO SET-104 Symposium on Military Capabilities Enabled Advances in Navigation Sensors. NATO, 2007: 1-18.
[21] 高帅和, 赵琳. 不同GPS/SINS超紧组合框架的分析与等价性推导[J]. 中国惯性技术学报, 2011, 10(5): 571-574.
GAO S H, ZHAO L. Analysis and equivalence derivation of different ultra-tight coupled navigation structures[J]. Journal of Chinese Inertial Technology, 2011, 10(5): 571-574 (in Chinese).
[22] HWANG D, LIM D W, CHO S L, et al. Unified approach to ultra-tightly-coupled GPS/INS integrated navigation system[J]. IEEE Aerospace and Electronic Systems Magazine, 2011, 26(3): 30-38.
[23] 秦永元, 俞济祥. 惯导速度辅助下GPS接收机码环的噪声响应和动态跟踪性能分析[J]. 航空学报, 1990(12): 564-569.
QIN Y Y, YU J X. Noise response and manoeuver tracking performance analysis for the GPS receiver code loop aided by the INS velocity[J]. Acta Aeronautica et Astronautica Sinica, 1990(12): 564-569 (in Chinese).
[24] 陈家斌, 袁信. 惯性速度辅助下GPS/捷联惯导组合系统性能研究[J]. 南京航空航天大学学报, 1994, 26(6): 730-736.
CHEN J B, YUAN X. Research on performance of inertial velocity aiding GPS/SNS integrated system[J]. Journal of Nanjing University of Aeronautics and Astronautics, 1994, 26(6): 730-736 (in Chinese).
[25] LASHLEY M, BEVLY D M, HUNG J Y. Analysis of deeply integrated and tightly coupled architectures[C]//IEEE/ION 2010 Position, Location and Navigation Symposium. Piscataway, NJ: IEEE Press, 2010: 382-396.
[26] GUSTAFSON D E, DOWDLE J R, ELWELL J M. Deeply-integrated adaptive GPS-based navigator with extended-range code tracking: United States Patent 6331835[P]. 2001-12-18.
[27] CRANE R, ALEXANDER S, BESER J, et al. System and method for advanced tight coupling of GPS and inertial navigation sensors: United States Patent 7274504[P]. 2007-09-25.
[28] GEBRE-EGZIABHER D, RAZAVI A, ENGE P, et al. Doppler aided tracking loops for SRGPS integrity monitoring[C]//Proceedings of the 16th International Technical Meeting of the Satellite Division of the Institute of Navigation. Manassas, VA: ION, 2003: 2562-2571.
[29] CHIOUT Y, GEBRE-EGZIABHER D, WALTER T, et al. Model analysis on the performance for an inertial aided FLL-assisted-PLL carrier-tracking loop in the presence of ionospheric scintillation[C]//Proceedings of the 2007 National Technical Meeting of the Institute of Navigation. Manassas, VA: ION, 2007: 2895-2910.
[30] KREYE C, EISSFELLER B, LUCK T. Improvements of GNSS receiver performance using tightly coupled INS measurements[C]//Proceedings of Intl Symposium on Kinematic Systems in Geodesy, Geomatics, and Navigation. 2001: 15-25.
[31] ALBAN S, AKOS D, ROCK S. Performance analysis and architectures for INS-aided GPS tracking loops[C]//Proceedings of the 2003 National Technical Meeting of the Institute of Navigation. Manassas, VA: ION, 2003: 611-622.
[32] 张提升. GNSS/INS标量深组合跟踪技术与原型系统验证[D]. 武汉: 武汉大学, 2013: 73-100, 116-121.
ZHANG T S. Research on the tracking technology of GNSS/INS deep integration based on hardware prototype[D]. Wuhan: Wuhan University, 2013: 73-100, 116-121 (in Chinese).
[33] ANDERSON R S, HANSON D S, KOUREPENIS A S. Evolution of low-cost MEMS inertial system technologies[C]//Proceedings of the 14th International Technical Meeting of the Satellite Division of the Institute of Navigation. Manassas, VA: ION, 2001: 1332-1342.
[34] HEGG J. Enhanced space integrated GPS/INS (SIGI)[J]. Aerospace and Electronic Systems Magazine, 2002, 17(4): 26-33.
[35] 于海亮. 基于INS辅助的GPS接收机捕获和跟踪技术研究[D]. 长沙: 国防科学技术大学, 2007: 61-68.
YU H L. Research on the acquisition and tracking technology of INS-aided GPS receiver[D]. Changsha: National University of Defense Technology, 2007: 61-68 (in Chinese).
[36] 匡鸿博. 高动态GPS信号跟踪技术的研究[D]. 上海: 上海交通大学, 2010: 49-58.
KUANG H B. Research on GPS signal tracking under high dynamic condition[D]. Shanghai: Shanghai Jiao Tong University, 2010: 49-58 (in Chinese).
[37] WANG Y, CHEN X, CAI J, et al. Design and analysis of high dynamic GPS/SINS integrated navigation schemes[C]//Proceedings of the 2nd International Conference on Intelligent Control and Information Processing. Piscataway, NJ: IEEE Press, 2011: 464-466.
[38] HORSLUND J M, HOOKER J R. Increase jamming immunity by optimizing processing gain for GPS/INS systems: United States Patent 5983160[P]. 1999-11-09.
[39] GUSTAFSON D, DOWDEL J, FLUECKIGER K. A high anti-jam GPS-based navigator[C]//IEEE 2000 Position Location and Navigation Symposium. Piscataway, NJ: IEEE Press, 2000: 495-503.
[40] KIM J W, HWANG D H, LEE S J. Performance evaluation of INS velocity-aided tracking loop and deeply coupled GPS/INS integration system in jamming environment[C]//Proceedings of the 63rd Annual Meeting of the Institute of Navigation. Manassas, VA: ION, 2007: 742-748.
[41] PARK D B, SHIN D H, OH S H, et al. Velocity aiding-based anti-jamming method for GPS adaptor kits[J]. Transactions of the Japan Society for Aeronautical and Space Sciences, 2011, 54(184): 130-136.
[42] JOVANCEVIC A, BROWN A, GANGULY S, et al. Ultra tight coupling implementation using real time software receiver[C]//Proceedings of the 17th International Technical Meeting of the Satellite Division of the Institute of Navigation. Manassas, VA: ION, 2004: 1575-1586.
[43] 唐康华. GPS/MIMU嵌入式组合导航关键技术研究[D]. 长沙: 国防科学技术大学, 2008: 71-75.
TANG K H. Research on the key technology of embedded GPS/MIMU integrated navigation[D]. Changsha: National University of Defense Technology, 2008: 71-75 (in Chinese).
[44] 陈坡, 孙付平, 郝万亮, 等. GNSS/INS深组合导航系统性能分析[C]//2012年中国卫星导航学术年会. 广州: 中国学术期刊电子出版社, 2012: 1-6.
CHEN P, SUN F P, HAO W L, et al. Performance analysis of deep integrated GNSS/INS system[C]//Proceedings of CSNC 2012. Guangzhou: China Academic Journal Electronic Publishing House, 2012: 1-6 (in Chinese).
[45] SOLOVOEV A, GUNAWARDENA S, VAN GRAAS F. Deeply integrated GPS/low-cost IMU for low CNR signal processing: Flight test results and real time implementation[C]//Proceedings of the 17th International Technical Meeting of the Satellite Division of the Institute of Navigation. Manassas, VA: ION, 2004: 1598-1608.
[46] SOLOVOEV A, BRUCKNER D, VAN GRAAS F, et al. Assessment of GPS signal quality in urban environments using deeply integrated GPS/IMU[C]//Proceedings of the 2007 National Technical Meeting of the Institute of Navigation. Manassas, VA: ION, 2007: 815-828.
[47] SOLOVOEV A, GUNAWARDENA S, VAN GRAAS F. Deeply integrated GPS/low-cost IMU for low CNR signal processing: Concept description and in-flight demonstration[J]. Navigation, 2008, 55(1): 1-13.
[48] GAO G, LACHPELLE G. INS-assisted high sensitivity GPS receivers for degraded signal navigation[C]//Proceedings of the 19th International Technical Meeting of the Satellite Division of the Institute of Navigation. Manassas, VA: ION, 2006: 2977-2989.
[49] PETOVELLO M, O’DRISCOLL C, LACHPELLE G. Carrier phase tracking of weak signals using different receiver architectures[C]//Proceedings of the 2008 National Technical Meeting of the Institute of Navigation. Manassas, VA: ION, 2008: 28-30.
[50] CHIOU T Y, SEO J, WALTER T, et al. Performance of a Doppler-aided GPS navigation system for aviation applications under ionospheric scintillation[C]//Proceedings of the 21st International Technical Meeting of the Satellite Division of the Institute of Navigation. Manassas, VA: ION, 2008: 1139-1147.
[51] PANY T, WINKE J, RIEDL B, et al. Performance of a partially coherent ultra-tightly coupled GNSS/INS pedestrian navigation system enabling coherent integration times of several seconds to track GNSS signal down to 1.5 dB-Hz[C]//Proceedings of the 22nd International Technical Meeting of the Satellite Division of the Institute of Navigation. Manassas, VA: ION, 2009: 2225.
[52] SOLOVOEV A, DICKMAN T J. Deeply integrated GPS for indoor navigation[C]//Proceedings of 2010 International Conference on Indoor Positioning and Indoor Navigation (IPIN). Piscataway, NJ: IEEE Press, 2010: 1-9.
[53] 赵琳, 赵洪斌, 闫超. 复杂环境下INS辅助GPS跟踪环路研究[J]. 传感器与微系统, 2011, 10(10): 22-25.
ZHAO L, ZHAO H B, YAN C. Study on tracking loops of INS-aided GPS in complex environment[J]. Transducer and Microsystem Technologies, 2011, 10(10): 22-25 (in Chinese).
[54] WANG X, JI X, FENG S. A scheme for weak GPS signal acquisition aided by SINS information[J]. GPS Solutions, 2013, 18(2): 243-252.
[55] CHIOU T Y, ALBAN S, ATWATER S, et al. Performance analysis and experimental validation of a Doppler-aided GPS/INS receiver for JPALS applications[C]//Proceedings of the 17th International Technical Meeting of the Satellite Division of the Institute of Navigation. Manassas, VA: ION, 2004: 1609-1618.
[56] WATSON R, PETOVELLO M, LACHAPELLE, et al. Impact of oscillator errors on IMU-Aided GPS tracking loop performance[C]//Proceedings of European Navigation Conference GNSS. Geneva: ENC, 2007: 2931-1-15.
[57] KIESEL S, LANGER M, ECKERT M, et al. Discriminator weighting and performance of a deeply coupled GPS/INS system at low CN0[C]//Proceedings of the 2011 International Technical Meeting of the Institute of Navigation. Manassas, VA: ION, 2001: 858-867.
[58] TSUJII T, FUJIWARA T, SUGANUMA Y, et al. Development of INS-aided GPS tracking loop and flight test evaluation[J]. SICE Journal of Control, Measurement, and System Integration, 2011, 4(1): 15-21.
[59] BAN Y, NIU X, ZHANG T, et al. Low-end MEMS IMU can contribute in GPS/INS deep integration[C]// IEEE/ION Position, Location and Navigation Symposium. Piscataway, NJ: IEEE Press, 2014: 746-752.
[60] HYSLOP G, GERTH D, KRAEMER J. GPS/INS integration on the standoff land attack missile (SLAM)[C]//IEEE Position Location and Navigation Symposium. Piscataway, NJ: IEEE Press, 1990: 407-412.
[61] SHERMAN P, HOLMES S. Personal navigation systems: TR-6/004[R]. DTIC, 2005.
[62] Northrop Grumman, LN251 Datasheet[EB/OL]. (2013)[2015].http://www.northropgrumman.com/Capabilities/LN251INSGPS/Documents/ln251.pdf.
[63] Northrop Grumman, LN251 Datasheet[EB/OL]. (2013)[2015].http://www.northropgrumman.com/Capabilities/LN270PLANS/Documents/ln270.pdf.
[64] BUCK T M, WILMOT J, COOK M J. A high G, MEMS based, deeply integrated, INS/GPS, guidance, navigation and control flight management unit[C]//Proceedings of IEEE/ION Plans. Piscataway, NJ: IEEE Press, 2006: 772-794.
[65] KVH, CNS-5000[EB/OL].http://www.kvh.com/Press-Room/Press-Release-Library/2008/080507-CNS5000-Intro.aspx.
[66] UTC-AEROSPACE-SYSTEM, SiNAV[EB/OL]. (2014)[2015].http://utcaerospacesystems.com/Pages/Default.aspx.
[67] GAUTIER J D. GPS/INS generalized evaluation tool (GIGET) for the design and testing of integrated navigation systems[D]. Stanford, California: Stanford University, 2003: 29-39.
[68] DYRUD L, WOESSNER B, JOVANCEVIC A, et al. Ultra-tightly coupled GPS/INS receiver for TSPI applications[C]//Proceedings of the 20th International Technical Meeting of the Satellite Division of the Institute of Navigation. Manassas, VA: ION, 2007: 2564-2572.
[69] LI T, GEORGY J, SYED Z, et al. Real-time navigation system for ultra-tight integration of GNSS and multi-sensors[C]//Proceedings of the 26th International Technical Meeting of the ION Satellite Division. Manassas, VA: ION, 2013: 2269-2275.
[70] LI T, PETOVELLO M G, LACHAPELLE G, et al. Performance evaluation of ultra-tight integration of GPS/vehicle sensors for land vehicle navigation[C]//Proceedings of the 21st International Technical Meeting of the Satellite Division of the Institute of Navigation. Manassas, VA: ION, 2009: 22-25.
[71] LI T, PETOVELLO M, LACHAPELLE G, et al. Real-time ultra-tight integration of GPS L1/L2C and vehicle sensors[C]//Proceedings of the 2011 International Technical Meeting of the Institute of Navigation. Manassas, VA: ION, 2011: 2426.
[72] BUSING H G, HAAK U, HECKER P. Aiding GNSS signal tracking loops using vehicle dead reckoning sensors[C]//Proceedings of the 2013 International Technical Meeting of the Institute of Navigation. Manassas, VA: ION, 2013.
[73] FERNANDEZ A, DIEZ J, DE CASTRO D, et al. ATENEA: Advanced techniques for deeply integrated GNSS/INS/LiDAR navigation[C]//2010 5th ESA Workshop on Satellite Navigation Technologies and European Workshop on GNSS Signals and Signal Processing (NAVITEC). Piscataway, NJ: IEEE Press, 2010: 1-8.
[74] LANGER M, KIESEL S, ASCHER C, et al. Deeply coupled GPS/INS integration in pedestrian navigation systems in weak signal conditions[C]//2012 International Conference on Indoor Positioning and Indoor Navigation (IPIN). Piscataway, NJ: IEEE Press, 2012: 1-7.
牛小骥男, 博士, 教授, 博士生导师。主要研究方向: 惯性导航与组合导航。
Tel: 027-68778595
E-mail: xjniu@whu.edu.cn
班亚龙男, 博士研究生。主要研究方向: GNSS/INS深组合。
E-mail: ylban@whu.edu.cn
张提升男, 博士, 讲师。主要研究方向: GNSS接收机, GNSS/INS深组合。
Tel: 027-68778890
E-mail: zts@whu.edu.cn
刘经南男, 博士, 教授, 博士生导师。主要研究方向: 卫星导航, 大地测量。
E-mail: jnliu@whu.edu.cn
URL:www.cnki.net/kcms/detail/11.1929.V.20151230.1617.002.html
ResearchprogressandprospectsofGNSS/INSdeepintegration
NIUXiaoji,BANYalong,ZHANGTisheng*,LIUJingnan
GNSSResearchCenter,WuhanUniversity,Wuhan430079,China
Withtheimprovementoftheperformancerequirementsofthenavigationsysteminaviation,aerospaceandmilitaryapplications,theGNSS/INSdeepintegrationhasgraduallybecometheresearchfocusasitisthedeepestwayofGNSS/INSintegration.ThispaperhasintroduceddifferentunderstandingsofthedeepintegrationconceptbasedontheoriginationanddevelopmentprocessofGNSS/INSdeepintegration.Accordingtothevariationofthereceivertrackingloopsandinformationprocessingmethods,thedeeplyintegratednavigationsystemcanbeclassifiedintothreemodes,whicharescalartracking-baseddeepintegration,coherentvectortracking-baseddeepintegrationandnon-coherentvectortracking-baseddeepintegration.Thecoherentvectortracking-baseddeepintegrationmodecanbefurtherclassifiedintothecascadeandcentralizedarchitectures.Thefeaturesarecomparedandanalyzedrespectivelybyprovidingarchitecturesofdifferentdeepintegrationmodes.TheresearchesoftheGPS/INSdeepintegrationresearchathomeandabroadarereviewedandproblemsinthecurrentresearcharesummarized.FinallythefuturedirectionsoftheGPS/INSdeepintegrationarepointedoutaccordingtothepracticalapplications.
GNSS/INS;integratednavigation;deepintegration;architecture;vector-baseddeepintegration;scalar-baseddeepintegration
2015-10-21;Revised2015-11-26;Accepted2015-12-22;Publishedonline2015-12-301617
s:NationalNaturalScienceFoundationofChina(41174028,41404029,L1422027);NationalHigh-techResearchandDevelopmentProgramofChina(2015AA124002)
.Tel.:027-68778890E-mailzts@whu.edu.cn
2015-10-21;退修日期2015-11-26;录用日期2015-12-22; < class="emphasis_bold">网络出版时间
时间:2015-12-301617
www.cnki.net/kcms/detail/11.1929.V.20151230.1617.002.html
国家自然科学基金 (41174028,41404029,L1422027); 国家“863”计划 (2015AA124002)
.Tel.:027-68778890E-mailzts@whu.edu.cn
牛小骥, 班亚龙, 张提升, 等.GNSS/INS深组合技术研究进展与展望J. 航空学报,2016,37(10):2895-2908.NIUXJ,BANYL,ZHANGTS,etal.ResearchprogressandprospectsofGNSS/INSdeepintegrationJ.ActaAeronauticaetAstronauticaSinica,2016,37(10):2895-2908.
http://hkxb.buaa.edu.cnhkxb@buaa.edu.cn
10.7527/S1000-6893.2015.0351
V443; TN961
A
1000-6893(2016)10-2895-14
