基于OLP的多机器人系统设计
2016-11-18万鸾飞
万鸾飞
(1.芜湖职业技术学院电气工程系 安徽芜湖241006;2.东南大学自动化学院 江苏南京 210096)
基于OLP的多机器人系统设计
万鸾飞1,2
(1.芜湖职业技术学院电气工程系 安徽芜湖241006;2.东南大学自动化学院江苏南京210096)
文章设计了基于OLP的一个具有多机器人协作功能的软件系统。在设计中首先分析多机器人在协作工作时,机器人之间的约束关系,架构了多机器人协作系统的软件框图以及类结构图,并完成了具体软件的实验仿真。
多机器人;离线编程;OLP
ecnomatix RobCAD,Delmia D5/V5和CimStation Robotics是来自通用机器人软件生产商的机器人OLP软件的典型代表。Tecnomatix RobCAD[1]支持工作路径的设计,仿真,最优化,分析和多设备机器人的离线编程。它为优化加工过程和计算工作周期提供了一个并行的工程平台。通过允许制造工程师在前期虚拟地验证自动化概念,RobCAD使制造商能够完美地引入自动化的生产流程。DELMIA[2]是一个基于OLP包,集成了机器人技术和制造技术的软件,它现在被广泛应用在各种制造业中。DELMIA可以在机器人程序被下载到真实设备中之前,采用3D仿真环境对程序进行测试和优化。DELMIA有配套的工具箱,它们提供了在机器人OLP的特定领域中许多有用的功能,比如工件位姿标定,可达性分析,冲突检测,路径规划等。CimStation Robotics(CSR)[3]是一款强大的三维仿真和离线编程软件,它能帮助制造商方便,快速地仿真和评估自动制造过程和机器人程序。CSR软件是一个模块化软件,可以选择不同的工具箱来建立复杂程度不同的软件。由此,它不但支持包括无损检测,焊接,喷涂,组装等各种应用场合,也最大限度地为客户节省了费用。
来自研究机构的机器人OLP软件多是用于学术目的,或围绕现有的CAD软件,或从头开始使用OpenGL,VRML 和Java3D技术开发。参考文献[4]设计了一个低成本的仿真系统,Autodesk Inventor。它是一个市售的3DCAD包,可被用作使机器人预编程路径可视化的一个接口,常被用在中小型企业的培训中。参考文献[5]以SolidWorks SDK包为基础构建了类似的软件。参考文献[6]设计了一个基于OpenGL,使用VC++6.0的机器人仿真系统。在文献[7]中,实现了一个以VRML为基础的图形化的三维仿真环境,它可以用于分析和预览PA10-7C机械臂的运动。
这些大量的机器人仿真与离线编程软件被研究与开发,但几乎没有一个讨论过多机器人协作的仿真功能,机器人协作已经在制造业工厂中普遍出现。这意味着OLP软件的现状和真实的机器人系统之间存在着差距。在本文中,我们将描述一种设计具有多机器人协作功能的OLP软件的方法。所开发的系统是一个集成环境,可用于路径的规划与测试,以及机器人运动的仿真。
一、多机器人离线编程系统设计
设计双机器人离线编程系统时,选定其中一个机器人为主机器人而另外一个为从机器人,而类似地,在n个机器人组成的多机器人系统中,要选定其中1个机器人为主机器人,另外n-1个机器人为从机器人,所以实现多机器人离线编程系统的方法可以用实现双机器人离线编程系统的过程来示例。为实现离线编程系统,首先要进行系统功能模块架构的设计,然后根据它进行软件的类结构设计。
(一)系统功能模块架构设计。根据软件工程思想,一般要先从宏观把握软件的整体,并由宏观到微观一步步实现软件。如图1所示为系统设计的架构图。

图1 系统功能模块架构图
机器人Job编辑:在离线编程系统中示教单机器人或双机器人,数据记录为关节空间或直角空间的Job文件,并提供对Job文件中运动命令的插入,修改,删除等操作的支持。机器人位姿查看:可以查看各机器人关节空间,多机器人系统主坐标系直角空间,单机器人直角空间的位姿数据。
独立/协作选择:在单机器人运行模式和多机器人协作运行模式之间切换。
功能模块架构中仿真场景可以对将生成的Job文件进行机器人作业动画演示,以预判生成的Job文件是否能够满足作业要求。当在仿真场景中示教完成协作Job文件且动画演示符合作业要求以后,系统将会生成和机器人个数相等数量的单机器人Job文件。真实多机器人系统执行协作任务时的系统层次结构图如图2所示。
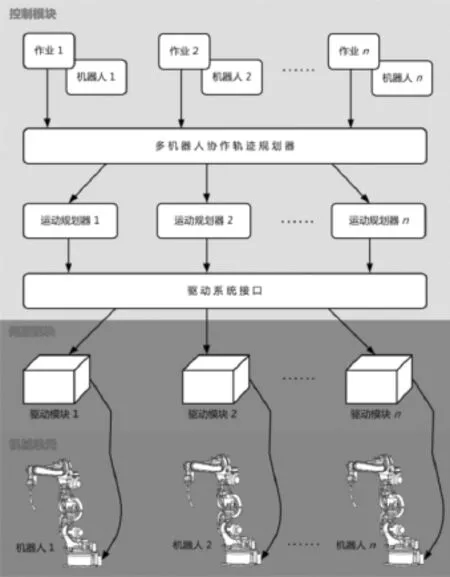
图2 多机器人系统的层次结构图
(二)类结构设计。在系统功能模块架构的基础上进一步设计软件的类结构图。
用UML建模软件Enterprise Architect8.0绘制,语言规则遵循 UML2.0标准。整个软件的类结构设计是以CJobCompileandExe,CTeachPendant,CRobot这三个类为中心展开的。
为借助实验室里的真实机器人平台来验证仿真系统为协作的多机器人离线编程的功能,首先要给机器人建立坐标系并获得D-H参数。其次,建立多机器人三维仿真场景。最后,编写继承自CRobot接口的具体机器人类,完成离线编程系统的设计。
SolidWorks作为一种流行的三维造型软件,支持的文件格式很多,比如STEP,VRML,STL,IGES等。各机器人公司一般会在其官网提供公司所生产机器人型号的仿真模型。在本文所进行的仿真实现中要用到YASKAWA公司Motoman系列机器人HP20D,可以下载到STEP格式的模型。首先,运行SolidWorks读取文件,将所得零件取一个有意义的名字,并保存为sldprt格式以备用。然后,把机器人各零件文件组装成一个装配体文件,并在零件之间添加配合。最后,将机器人单体装配体装配成多机器人仿真场景。另外,为使仿真场景更逼真,可以添加控制柜,地板,栅栏等配件,而这些配件都是很规则的几何体,利用SolidWorks可以很容易地绘制出双机器人的仿真模型,如图3所示。
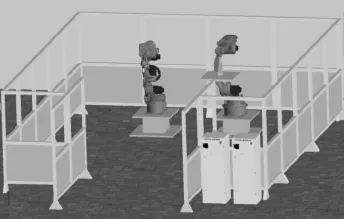
图3 双机器人仿真场景
二、实验验证
为了让多个单机器人完成一个协作任务,先要在离线编程系统中规划出其中各个机器人的单机器人Job。生成的单机器人Job只记载单个机器人运动点的位姿,运动方式MOVJ或MOVL,运动速度值,和多机器人运动时的同步信号。不同公司生产的机器人控制器所需要的文件格式有所不同,它们分别是单机器人Job,需要同时执行以完成直线上叠加圆弧的协作运动。
在仿真场景中两个单机器人Job时的运动效果如图4
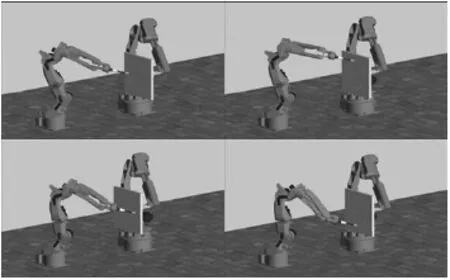
图4 仿真场景中执行直线上叠加圆弧运动Job
通过图4可知,仿真场景中机器人和真实机器人系统运动效果的一致,验证了软件离线编程功能的有效性。通过以上两个实验验证了所设计的软件具有为多机器人协作系统离线编程的能力。
三、结语
本文通过分析机器人协作运动时运动学约束关系,设计了的多机器人协作离线编程系统的软件框架,并根据实验室现有项目双机器人系统作了具体软件实现。对该软件进行的多机器人协作运动规划与仿真功能实验和软件离线编程功能实验,综合验证了本文所提出的设计多机器人协作系统离线编程软件方法的正确性与实用性。
[1]SiemensProductLifecycleManagementSoftware Inc.Robotics and automation workcell simulation,validation and off-line programming[EB/OL].http://www.plm.automation.siemens.com/zh cn/products/tecnomatix/robotics automation/robcad/index.shtml,
avaliable2012.10.6
[2]Dassault Systemes.DELMIA Digital Manufacturing& Production[EB/OL].http://www.3ds.com/products/delmia/,avaliable 2012.10.6
[3]AppliedComputing&EngineeringLtd.CimStationRobotics [EB/OL].http://acel.squarespace.com/cimstation robotics,avaliable 2012.10.6
[4]P.Neto,J.N.Pires,A.P.Moreira.Robotpathsimulation:alow costsolution based on CAD.in:Proc of2010 IEEEConference on RoboticsAutomationandMechatronics(RAM),pp.333-338,2010.
[5]S.Mitsi,K.-D.Bouzakis,G.Mansour,D.Sagris,G.Maliaris. O_-lineprogrammingofan industrial robot formanufacturing.[J]. InternationalJournalofAdvancedManufacturingTechnology,26(3): 262C267,2005.
[6]W.X.Zhang,F.S.Zou,D.K.Qu,F.Xu.Researchofkeytechnologieson 3D simulation system of industrial robot.in:Proc of 7th World Congress on in Intelligent Control and Automation (WCICA2008),pp.565-568,2008.
[7]W.M.Shen,J.Gu,Y.D.Ma.3D Kinematic Simulation for PA10-7CRobot Arm Based on VRML.in:Proc of 2007 IEEE InternationalConferenceonAutomationand Logistics(ICAL2007), pp.614-619,2007.
[责任编辑郑丽娟]
TP242
A
2095-0438(2016)11-0148-03
2016-05-28
万鸾飞(1979-),女,安徽省泾人,芜湖职业技术学院副教授,硕士,研究方向:工业机器人控制研究。
国家自然科学基金资助项目(61503162,51505193);安徽省质量工程项目(2015zy085,2015jxtd056);高校优秀青年人才支持计划重点项目(gxyqZD2016594)。