基于自适应反步法和端口受控哈密顿理论的永磁同步电机控制*
2016-11-17符晓玲刘旭东
符晓玲, 刘旭东
(1. 昌吉学院 物理系,新疆 昌吉 831100;2. 山东大学 控制科学与工程学院,山东 济南 250061)
基于自适应反步法和端口受控哈密顿理论的永磁同步电机控制*
符晓玲1,2, 刘旭东2
(1. 昌吉学院 物理系,新疆 昌吉 831100;2. 山东大学 控制科学与工程学院,山东 济南 250061)
提出了一种基于自适应反步控制和端口受控哈密顿(PCH)系统理论的永磁同步电机(PMSM)速度控制方法。考虑电机负载扰动,提出了基于反步法的PMSM速度环自适应控制;然后将PMSM电磁子系统模型表示成哈密顿系统形式,根据PCH系统理论求得控制器。仿真结果表明,设计的控制方法能够快速达到期望的转速值,且具有较好的抗负载扰动能力。
永磁同步电机; 自适应反步法; 端口受控哈密顿
0 引 言
永磁同步电机(Permanent Magnet Synchronous Motor, PMSM)因具有效率高、功率密度高、转矩脉动小、噪声低等优点,在电动汽车驱动系统等领域[1]得到了越来越广泛的应用。PMSM是一类多变量、强耦合的非线性系统,普通的PID控制难以满足电动汽车驱动系统高性能要求[2]。近年来,一些高性能控制策略,如反步控制[3- 4]、滑模控制[5-6]、自适应控制[7]、自抗扰控制[8]、端口受控哈密顿(Port Controlled Hamiltonian, PCH)控制[9-11],反馈线性化控制[12]、智能控制[13-14]等被应用到PMSM控制系统中。另外,结合多种控制方法优点的复合控制策略也得到了国内外学者的关注。文献[15]针对PMSM控制系统的参数摄动和负载扰动,设计了自适应模糊反步控制器;文献[16]提出了基于自适应反步滑模方法的电机控制器,在反步法的基础上,构造电流误差的滑模面,可有效减小负载变化的影响。文献[17]提出了基于模糊滑模方法和负载转矩观测器的PMSM速度跟踪控制,可有效减小滑模控制产生的抖振,且具有很好的抗负载扰动能力。文献[18]结合自抗扰控制与PCH控制的优点,提出了PMSM的自抗扰-无源控制器。
本文在反步控制的基础上,将PMSM的电磁子系统表示成PCH的形式,利用互联和阻尼配置的能量成型控制方法,构造哈密顿控制器,应用到电流环控制中,相比于文献[9]中将PMSM系统表示成PCH系统形式,本文控制器设计更加简单,且具有良好的抗负载扰动能力。通过构造Lyapunov函数证明了整个系统的渐近稳定性。
1 PMSM的数学模型
PMSM在d-q同步旋转坐标系下的数学模型可表示为
(1)
τ=p[(Ld-Lq)idiq+Φiq]
(2)
式中:Ld、Lq——d-q同步旋转坐标系下的定子电感;
id、iq,ud、uq——d-q坐标系下的定子电流和电压;
Rs——定子电阻;
p——极对数;
ω——转子机械角速度;
Φ——永磁体产生的磁链;
J——转动惯量;
τ——电磁转矩;
τL——负载转矩。
对于隐极式PMSM:
Ld=Lq=L
(3)
式(2)可写成
τ=pΦiq
(4)
2 基于自适应反步法的PMSM哈密顿控制
PMSM的控制目标是转速ω跟踪其参考转速ω*,借助于反步法可以将跟踪问题转化为跟踪误差的稳态问题。
定义e=ω*-ω,则
(5)

(6)
(7)
(8)
将式(8)代入式(5)得
(9)
重新定义Lyapunov函数:
(10)
对其求导得


(11)
为了实现电流跟踪控制,本文利用PCH系统理论建立PMSM电磁子系统的数学模型,并构造基于哈密顿方法的电流环控制器[11]。
根据式(1),令
ud1=ud,uq1=uq-pωΦ
(12)
则
(13)
定义系统的状态变量、输入变量、输出变量分别为
x=[x1x2]T=[LidLiq]T
u=[ud1uq1]T
y=[idiq]T
取哈密顿函数为
(14)
则
(15)
将式(13)表示成哈密顿系统形式:
(16)
(17)
(18)
其中:Jd(x)和Rd分别为期望的互联和阻尼矩阵,且有
(19)
由式(16)和式(18)联立得
(20)
取
(21)
其中: J1与r2、r3分别为待定的互联和阻尼参数。
取期望的闭环哈密顿函数为Hd(x)=H(x-x*),则
(22)
由式(17)、式(19)~式(22)可得哈密顿系统的控制器为
(23)
将Hd(x)对时间t求导,得


(24)

由式(12)和式(23)可求得电流环控制器:
(25)
3 仿真结果
给定参考转速ω*=100rad/s,负载转矩3N·m,在t=0.3s时负载转矩变为5N·m。图1为所提方法对应的转速响应曲线,图2和图3分别为对应的d轴和q轴电流曲线。从图1~图3中可看出: 转速响应快且无超调,具有良好的稳态和动态性能;在此过程中,电流也能快速跟踪给定参考电流,电流跟踪性能良好。
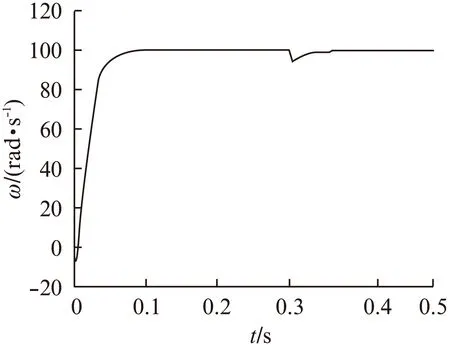
图1 基于反步法和PCH的转速响应曲线

图2 基于反步法和PCH的d轴电流响应曲线
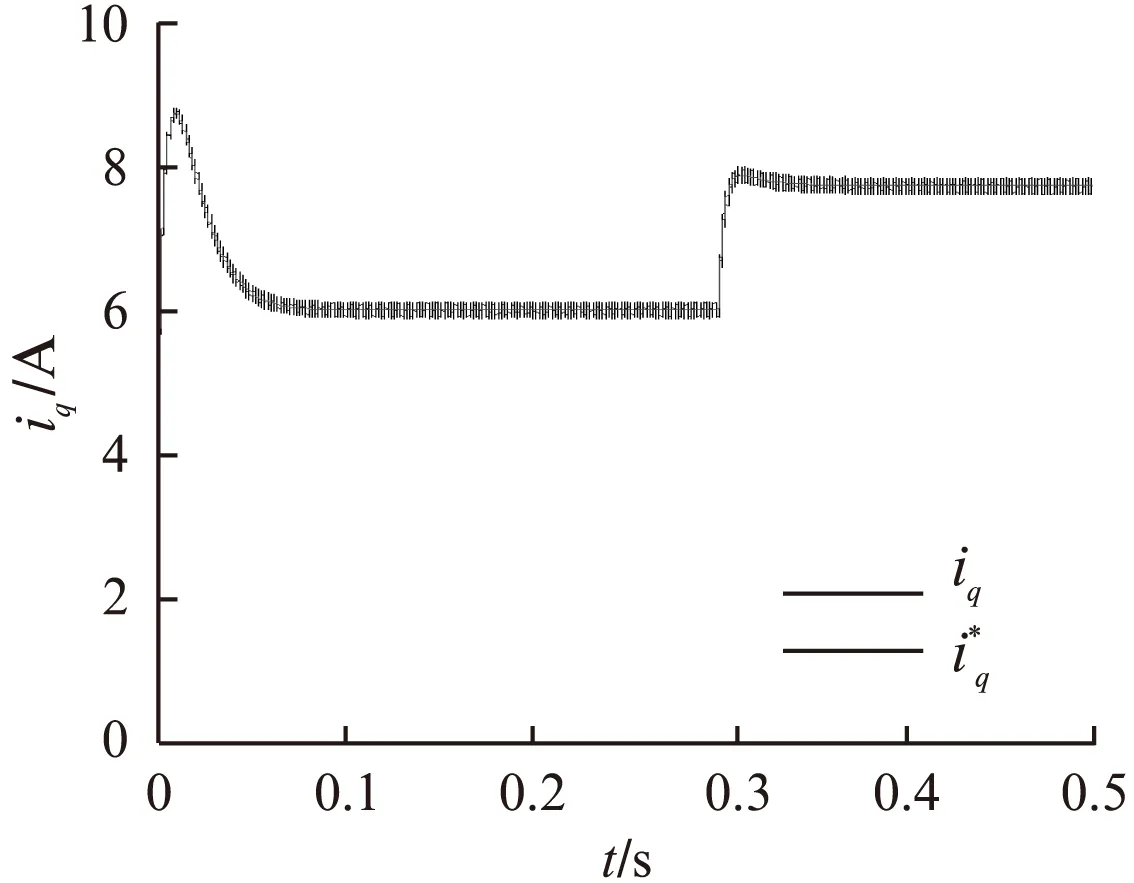
图3 基于反步法和PCH的q轴电流响应曲线
图4为估计的负载转矩曲线。从图4可看出,当存在负载扰动时,转速有较小的波动,很快消失,且转速无稳态误差,负载转矩估计器具有快速准确的负载跟踪能力,从而可以有效地抑制扰动所引起的稳态误差,而且负载变化时电流仍具有良好的跟踪性能。
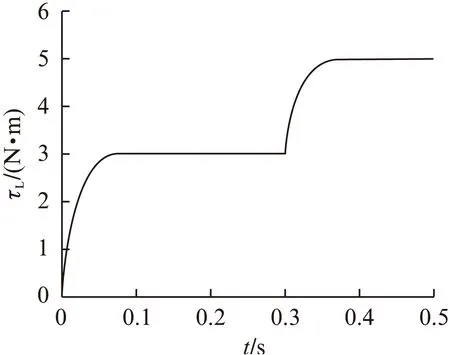
图4 估计的负载转矩曲线
4 结 语
本文在PMSM矢量控制的基础上,提出了基于自适应反步控制和PCH系统理论的PMSM速度控制方法。首先采用反步控制方法设计了转速环控制器,能有效估计负载转矩值,提高了系统抗扰动性能,然后将PMSM的电磁子系统表示成哈密顿系统形式,设计了基于PCH的电流控制器。仿真结果表明,该控制方法具有良好的转速和电流跟踪性能,且稳态和动态性能良好。
[1]EHSANIM,GAOY,EMADIA.现代电动汽车、混合动力电动汽车和燃料电池车——基本原理、理论和设计[M].倪光正,倪培宏,熊素铭,译.北京: 机械工业出版社,2012.
[2] 邓国红,周挺,杨鄂川,等.ISG混合动力电动汽车的转矩控制策略[J].重庆理工大学学报(自然科学版),2014(11): 18-23.
[3] 王家军,赵光宙,齐冬莲.反推式控制在永磁同步电动机速度跟踪控制中的应用[J].中国电机工程学报,2004,24(8): 95-98.
[4] 林立,黄苏融.内置式永磁同步电机牵引系统宽调速非线性控制器[J].电力自动化设备,2010,30(3): 44- 48.
[5] 张晓光,赵克,孙力.永磁同步电机滑模变结构调速系统动态品质控制[J].中国电机工程学报,2011,31(15): 47-52.
[6] 张碧陶,皮佑国.基于分数阶滑模控制技术的永磁同步电机控制[J].控制理论与应用,2012,29(9): 1193-1197.
[7]LISH,LIUZG.Adaptivespeedcontrolforpermanent-magnetsynchronousmotorsystemwithvariationsofloadinertia[J].IEEETransonIndustrialElectronics, 2009,56(8): 3050-3059.[8] 孙凯,许镇琳,盖廓.基于自抗扰控制器的永磁同步电机位置伺服系统[J].中国电机工程学报,2007,27(15): 43- 46.
[9] 于海生,王海亮,赵克友.永磁同步电机的哈密顿建模与无源性控制[J].电机与控制学报,2006,10(3): 229-233.
[10] PETROVIC V, ORTEGA R, STANKOVIC A M. Interconnection and damping assignment approach to control of PM synchronous motors[J]. IEEE Trans on Control Systems Technology, 2001,9(6): 811-820.
[11] LI K, LIU X D, SUN J. Robust current control of PMSM based on PCH and disturbance observer[C]∥Proceedings of the 33rd Chinese Control Conference,2014: 7938-7942.
[12] GRCAR B, CAFUTA P, ZNIDARIC M. Nonlinear control of synchronous servo drive[J].IEEE Trans on Control Systems Technology, 1996,4(2): 177-184.
[13] YANG Y, VILATHGAMUWA D M, RAHMAN M A. Implementation of an artificial-neural-network-based real-time adaptive controller for an interior penmanent magnet motor drive[J].IEEE Trans on Energy Conversion, 2003,39(1): 96-104.
[14] LI S H,GU H. Fuzzy adaptive internal model control schemes for PMSM speed-regulation system[J]. IEEE Trans on Industrial Informatics,2012,8(4): 767-779.
[15] 方一鸣,任少冲,王志杰.永磁同步电机转速自适应模糊Backstepping控制[J].电机与控制学报,2011,15(6): 97-102.
[16] LIN C K,LIU T H,FU L C. Adaptive backstepping PI sliding-mode control for interior permanent magnet synchronous motor drive systems[C]∥American Control Conference, USA, 2011: 4075- 4080.
[17] VIET Q L, HAN H C,JIN W J. Fuzzy sliding mode speed controller for PM synchronous motors with a load torque observer[J]. IEEE Trans on Power Electronics, 2012,8(4): 767-779.
[18] 侯利民,张化光,刘秀翀.带ESO的自适应滑模调节的SPMSM自抗扰-无源控制[J].控制与决策,2010,25(11): 1651-1656.
Control of Permanent Magnet Synchronous Motor Based on Adaptive Backstepping Method and Port Controlled Hamiltonian Theory*
FUXiaoling1,2,LIUXudong2
(1. Department of Physics, Changji University, Changji 831100, China;2. College of Control Science and Engineering, Shandong University, Jinan 250061, China)
The speed control method of permanent magnet synchronous motor (PMSM) based on adaptive backstepping and port-controlled hamiltonian theory(PCH) was propsed. First, considering the load disturbance of the motor, adaptive control of speed loop for PMSM based on backstepping method was proposed; then the electromagnetic subsystem model was expressed as a Hamiltonian form, for which the controller was obtained according to the PCH theory. The simulation results showed that the method could quickly reach the expected value of speed,and had good resistance to the load disturbance.
permanent magnet synchronous motor(PMSM); adaptive backstepping method; port cotrolled hamiltonian(PCH)
新疆维吾尔自治区自然科学基金面上项目(201318101-16)
符晓玲(1977—),女,博士研究生,讲师,研究方向为电动汽车能量管理、驱动系统控制等。
刘旭东(1987—),男,博士研究生,研究方向为电动汽车驱动系统控制、非线性控制等。
TM 351
A
1673-6540(2016)10- 0035- 04
2016-03-14