基于实测数据的单元平均CFAR检测器性能分析
2016-11-17孙艳丽谢宁波
孙艳丽,谢宁波
(海军航空工程学院 a.基础实验部; b.学员25队,山东 烟台 264001)
【信息科学与控制工程】
基于实测数据的单元平均CFAR检测器性能分析
孙艳丽a,谢宁波b
(海军航空工程学院 a.基础实验部; b.学员25队,山东 烟台 264001)
主要介绍了均值类CFAR算法中的3种经典算法在均匀杂波背景和多目标环境下采用仿真方法进行检测性能对比。在此基础上,基于导航雷达对海探测实测数据,对均值类CFAR检测器中最为经典的单元平均CFAR检测器进行性能分析与验证,为均值类CFAR检测器的使用提供参考。
海杂波;恒虚警;目标检测
早期雷达的功能主要是发现目标和测量目标的空间位置,其信号处理功能简单,一般将接收的所有信息都直接送给视频显示器。噪声、杂波、干扰和目标回波信号都同时被显示出来,对目标的检测能力取决于雷达操作员。为了从背景噪声、杂波和干扰中发现目标,操作员要监视显示器回波信号的变化。尽管还有一些雷达系统直接显示这些原始数据,但是对目标自动检测和跟踪功能已成为现代雷达系统的一个重要特点,并已得到广泛应用。在雷达自动检测系统中,恒虚警(CFAR)处理是一个提供检测阈值的信号处理算法。CFAR设计的目的是提供可以相对避免背景噪声、杂波和干扰变化影响的检测阈值,并且使自动检测在均匀背景中具有恒定的虚警概率。
CFAR检测器中最为经典且影响最广的就是均值(ML,Mean Level)类CFAR处理方法。它们的共同特点是在局部干扰功率水平估计中采用取均值的方法。最经典的均值类CFAR方法是单元平均CA[1]方法。CA方法在均匀杂波背景下具有最优的检测性能。为改善非均匀杂波背景中的检测性能,又相继出现了GO[2]、SO[3]和WCA[4-5]等均值类的CFAR方法。GO-CFAR检测方法的优点是在杂波边缘环境中能保持好的虚警控制功能,但是在多目标环境中则会出现“目标遮蔽”现象;当干扰目标只位于前沿滑窗或后沿滑窗时,SO-CFAR检测方法的优点是具有好的多目标分辨能力,但是它的虚警控制能力很快,带来负面影响。本研究对上述3种ML类CFAR算法进行性能仿真分析,并采用X波段导航雷达实测数据分析CA-CFAR检测方法的检测性能。
1 ML-CFAR检测原理[6-8]
在CA-CFAR检测器中,背景噪声功率水平由R=2n个参考单元采样的均值估计得到。它是在参考单元采样服从指数分布的假设下对杂波功率水平的一个最大似然估计。为了便于计算,常把因子1/R归到标称化因子中,取
(1)
Z称为总的杂波功率水平估计。
由于指数分布是Г分布在α=1的特殊情况下的PDF为
(2)
其中,α和β是两个参数,式(2)对应的累积分布函数用G(α,β)表示,对于服从Г分布的随机变量X,将它记为X~G(α,β)。X的矩母函数为
(3)
根据IID的假设得到xi~G(1,μ)和yi~G(1,μ)。由上式可知CA-CFAR检测器中对杂波功率水平的估计Z~G(2n,μ)。这样就得到CA-CFAR检测器的检测概率
(4)
可由上式在λ=1时得到标称化因子T与虚警概率间的关系,即
(5)
从式(4)和式(5)可以看到检测虚警概率和虚警概率不依赖于μ。CA-CFAR具有恒虚警特性。
GO-CFAR主要是针对杂波边缘环境背景设计的。它取两个局部估计的较大者作为检测器总的杂波功率水平估计,即有
Z=max(X,Y)
(6)
其中
(7)
它们是独立的随机变量。GO-CFAR检测器在均匀杂波背景中的虚警概率
(8)
其中,T是依赖于Pfa的设计值和参考滑窗尺寸R=2n的常数,用T/(1+λ)代替上式中的T可得到GO-CFAR检测器的检测概率Pd
(9)
SO-CFAR方案可以解决单边滑窗中出现多个干扰目标时引起的检测性能下降的问题。当雷达探测特定距离单元的目标时,需要降低临近干扰目标的影响,SO-CFAR方案使用式(7)中X和Y的较小者作为总的杂波功率水平估计
Z=min(X,Y)
(10)
SO-CFAR检测器在均匀杂波背景中的虚警概率为
(11)
(12)
2 ML-CFAR性能仿真分析
2.1 均匀杂波背景下性能分析
在均匀杂波背景中,虚警概率设置为10-6,参考单元数目分别设置为24、16和8,通过图1可以明显看出,CA检测概率明显优于GO和SO,检测概率CA>GO>SO。同时,随着信噪比不断增大,三种检测器的性能逐渐向检测概率等于1趋近。
当参考单元数目设置为8时,通过检测图发现,GO检测概率明显优于SO和CA。检测概率GO>SO>CA。说明随着虚警概率变小时(相对比较虚警概率10-6),当参考单元数目设置过小时,将会影响CA检测器的检测性能。一般情况下,CA检测器在均匀杂波背景下的检测性能最好。
2.2 多目标背景下性能分析
在多目标环境(一个干扰源)中,虚警概率设置为10-5,参考单元数目分别设置为16和8,通过检测图2(a)和图2(b)可以明显看出,SO检测概率明显优于CA和GO。
在多目标环境(一个干扰源)中,虚警概率设置为10-5,参考单元数目设置为24,通过检测图2(c)可以明显看出,在低信噪比的情况下,GO检测概率明显优于CA检测器和SO检测器,检测概率GO>CA>SO;当信噪比逐渐升高,SO检测器的检测性能变得越来越好,检测性能明显优于CA检测器和GO检测器。可见,参考单元数目选取会影响3种检测器的检测性能,对SO检测器来说,参考单元数目越小,信噪比越高,越能体现SO检测器的优越性。
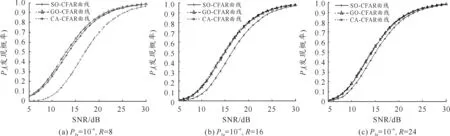
图1 均匀杂波背景检测性能

图2 多目标环境检测性能
3 实测数据条件下CFAR处理结果分析
本节采用高海情条件下导航雷达实测数据对CA-CFAR进行验证与性能分析。该导航雷达架设于烟台第一海水浴场附近,架高约80 m,架设位置距海岸线约500 m,工作频段为X波段,天线工作采用圆周扫描模式。数据采集时,海面为大浪大涌,气象条件较复杂,海情等级在3级以上。
图3给出了经抗同频异步干扰处理后的CFAR检测结果,其中,参考单元数R设为16,虚警概率分别设为10-1、10-3和10-5。
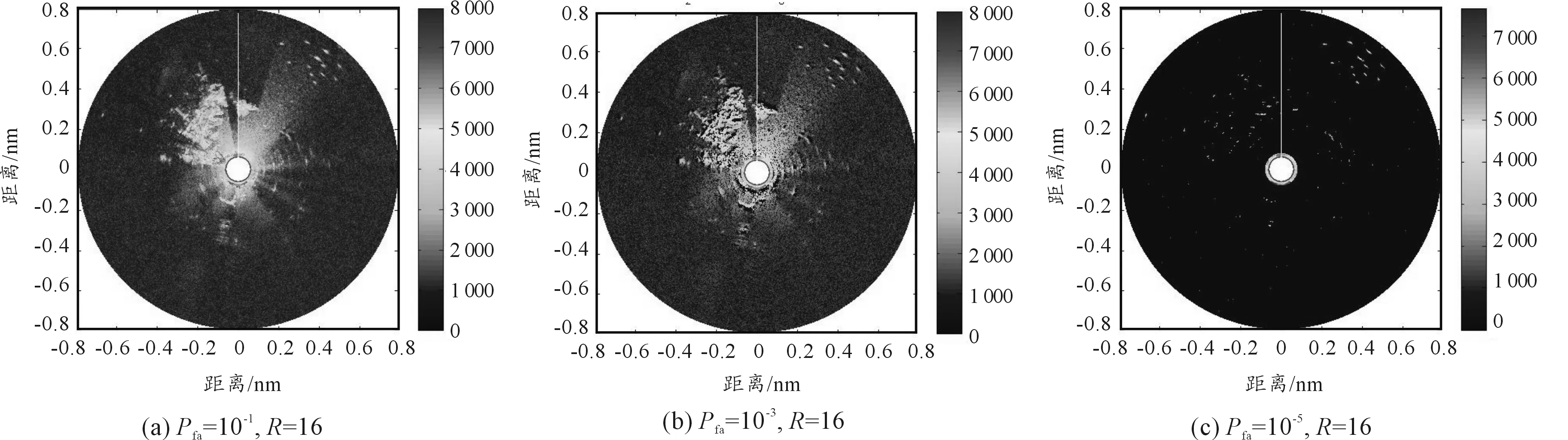
图3 CFAR检测结果
图3(a)中,虚警概率为10-1的情况下,检测区域大体轮廓能够显示出来,但是杂波等干扰影响较大,其中小目标无法正常识别。由于虚警概率设置过大,门限变低,杂波和目标通过门限的概率变大,目标在屏幕显示的同时,杂波也随之显示,得到的效果就是目标和杂波同时显示,影响检测效果;在图3(c)中,虚警概率为10-5的情况下,重点检测区域(图中白色方框内)大部分目标被覆盖,陆地杂波被分割成斑点状目标。在虚警概率设置过低的情况下,门限抬高,检测目标和杂波同时被门限限制,无法通过门限,所以在显示画面上无法显示,造成目标丢失,没有达到预期检测效果。
在图3(b)中,虚警概率为10-3的情况下,烟台港等陆海交界处能够较为清晰地保留并显示,较远距离处的目标也能够检测到,但由于受高海情影响,距离较近处的强海杂波也均超过门限形成虚警,严重影响近距离小目标检测。
图4给出了虚警概率为10-3条件下参考单元分别取6和24时的CFAR检测结果。

图4 虚警概率为10-3时CFAR检测结果
比较图3(b)、图4,虚警概率保持一定,参考单元设置为6,陆地等目标在屏幕上显示成斑点状,效果较差。无法在图中正确分析港口和陆地形状。当参考单元设置为24和16的情况下,显示目标变多,陆地和港口在屏幕上正常显示,能够正确区分地标信息。
4 结束语
本文主要介绍了均值类CFAR算法中的3种经典算法的基本原理,并采用蒙特卡洛仿真方法进行了检测性能对比分析。在此基础上,基于高海情条件下的X波段导航雷达对海探测实测数据,对均值类CFAR检测器中最为经典的单元平均CFAR检测器进行性能分析与验证,还分析了检测性能受检测门限、参考单元等参数的影响,为均值类CFAR检测器的实际应用提供参考。
[1] FINN H M,JOHNSON R S.Adaptive detection mode with threshold control as a function of spatially sampled clutter-level estimates[J].RCA Review,1968,29:414-464.
[2] HANSEN V G.Constant false alarm rate processing in search radars.IEEE International Radar Conference[C].London,1973:325-332.
[3] TRUNK G V.Range resolution of targets using automatic detectors[J].IEEE Trans.on AES,1978,14(5):750-755.
[4] BARKAT M,VARSHNEY P K.A weighted cell-averaging CFAR detector for multiple target situation.Proc.of the 21st Annual Conference on Information Sciences and Systems[C].Baltimore,Maryland,1987:118-123.
[5] HIMONAS S D,BARKAT M,VARSHNEY P V.CFAR detection for multiple target situations[J].IEE Proc.-F,1989,136(5):193-209.
[6] 何友,关键,彭应宁,等.雷达自动检测与CFAR处理[M].北京:清华大学出版社,2011:104-106.
[7] 胡可欣,胡爱明.雷达杂波环境恒虚警率处理的实现[J].舰船电子对抗,2006,29(2):3-7.
[8] ROHLING H.Radar CFAR thresholding in clutter and multiple target situations[J].IEEE Trans.on AES,1983,19(4):608-621.
(责任编辑 杨继森)
Performance Analysis of Cell Average CFAR Detector Based on Measured Data
SUN Yan-lia, XIE Ning-bob
(a.Department of Basic Experiment; b.Company Twenty-Five, Naval Aeronautical and Astronautical University, Yantai 264001, China)
This paper introduced three classical algorithms of ML-CFAR and compared the performance by simulation method in homogeneous clutter background and multi-target environment. Based on real radar data from navigation radar illuminating sea surface, the performance of the cell average CFAR, which is one of the most classical detectors, was analyzed and verified. The results can lay the foundation for the use of ML-CFAR detector.
sea clutter; CFAR; target detection
2016-06-12;
2016-07-10
国家自然科学基金资助项目“MIMO阵列雷达海上微弱目标检测技术研究”(61471382)
孙艳丽(1982—),女,工程师,硕士,主要从事信号处理研究。
10.11809/scbgxb2016.10.017
孙艳丽,谢宁波.基于实测数据的单元平均CFAR检测器性能分析[J].兵器装备工程学报,2016(10):84-87.
format:SUN Yan-li, XIE Ning-bo.Performance Analysis of Cell Average CFAR Detector Based on Measured Data[J].Journal of Ordnance Equipment Engineering,2016(10):84-87.
TN957.51
A
2096-2304(2016)10-0084-04