主动吸声技术研究综述
2016-11-16陈卓司舒舒
陈卓司舒舒
(1.海军驻杭州地区军事代表室,杭州,310023)
(2.声纳技术重点实验室 第七一五研究所,杭州,310023)
主动吸声技术研究综述
陈卓1司舒舒2
(1.海军驻杭州地区军事代表室,杭州,310023)
(2.声纳技术重点实验室 第七一五研究所,杭州,310023)
对国内外主动吸声技术的发展进行了论述,分析了其中的难点,并给出了未来发展趋势。
主动控制;低频吸声;综述
不管是在空气中还是水中,主动吸声技术日益受到人们的关注。传统的被动吸声材料一般只对中高频声波有效,对低频声波而言要达到相同的吸声效果则厚度增加,一般无法实际使用,为此人们提出了主动吸声的概念。
上世纪30年代,人们首次提出了噪声与振动主动控制思想,DSP硬件技术和自适应信号处理技术的发展则对其从理论走向实践起到了关键的促进作用,并形成了自适应噪声与振动主动控制这一新的技术领域。主动控制的基本思想是,利用传感器拾取产生噪声或振动的源信号,经合适的滤波处理后产生另一种噪声或振动,使得布放在误差传感器附近的范围内总的噪声或振动减小。根据是否能提供初级声源,主动噪声控制分为前馈控制和反馈控制。前馈控制一般利用噪声源的参考信号经过滤波器得到控制信号,反馈控制则是利用误差信号经过滤波器得到控制信号。在空气声学中,初级声源容易获得,因此多用前馈控制;而水声中由于无法获得初级声源所以多用反馈控制。但反馈控制容易出现发散问题,因此为了算法的稳定性,应尽可能地采用前馈控制。
在噪声与振动主动控制领域有很大一部分研究是围绕主动吸声展开的。主动吸声一般是指通过主动控制来消除反射声,从而达到减小混响或反射的目的,典型应用包括空气中音乐厅的主动吸声和水下大型目标的主动吸声。由于只需要消除反射声,而不是使声场中声压最小,因此一般需要把反射声分离出来。
1 两种声波分离方法
在很多实际应用中,声场中入射声和反射声是叠加在一起的,想要进行主动吸声控制往往需要对入射声和反射声进行声波分离。2003年,H zhu提出两种声波分离方法[1]:积分法和时延法,并比较了两种声波分离方法各自的优缺点。
积分法如图1所示,利用板前两个相距几厘米的麦克风拾取声压信号p1和p2,如果两个麦克风之间的距离d相对于声波的最小波长很小,便可通过近似推导得到入射声和反射声,其中pi表示入射声,pr表示反射声,c为声速。


图1 对板的反射控制系统
时延法如图2所示,声压信号p1和p2可以分为两部分:入射声和反射声。p1拾取到的入射声和p2拾取到的入射声之间是一个纯时延关系,p1拾取到的反射声和p2拾取到的反射声之间也是一个纯时延关系。
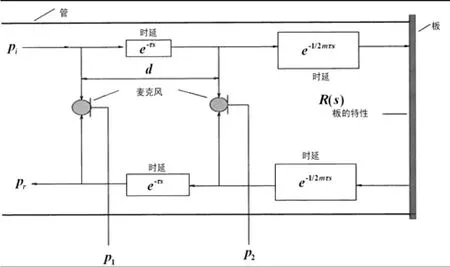
图2 时延法进行声波分离
设

则x(t)是只与反射声相关的信号,与入射声无关;y(t)是只与入射声相关的信号,与反射声无关。时延法通过控制构造出来的信号x(t)而不是真正的反射声来实现主动控制。
以上两种声波分离方法各有利弊,积分法需要使用多阶高通滤波器来消除累加产生的偏移误差,导致运算时间长;好处是入射声和反射声可以完全分离,入射声可以作为参考信号。时延法对信号及其一阶时延进行运算,计算量小;缺点是x(t)和y(t)不是真正意义上的入射声和反射声,若作为参考信号使用会导致次级声源声反馈的问题。
2 空气中主动吸声研究进展
20世纪50年代,Olson和May首次实现了真正意义上的有源控制系统“电子吸声器”,通过调节扬声器的输出使声传感器总的声压为零[2-3]。20世纪80年代,随着电子、控制、计算机和信号处理等技术的发展,一些以前难以实现的主动噪声控制系统变得可行,于是兼顾中高频被动吸声优点和低频主动吸声优点的混合吸声系统相继出现。1984年,国外学者D Guicking和Lorenz首次开展了主被动混合吸声系统的研究[4]。实验在声管中进行,被动材料为一块多孔板,多孔板与管道末端相距一定距离,管道末端是作为控制源的扬声器,多孔板前的麦克风拾取信号,经过适当的放大送入控制扬声器,还有一个麦克风放在多孔板后作为误差传感器,通过主动控制使误差传感器处声压最小。1994年Thenail等人研究了玻璃纤维被动吸声层的吸声系统,背后为空气腔,终端是主动面[5]。他们研究了两种方法,一种是误差传感器放置在玻璃纤维层后面,通过调节主动面使误差传感器处声压最小,实验结果显示在低频随着频率的增加,吸声效果逐渐变差。另一种方法与D Guicking和Lorenz的实验方法相同,只是将被动吸声层用玻璃纤维替代,实验结果显示在500~1 400 Hz范围内有很好的吸声效果,如图3所示。但这两种方法都是用的玻璃纤维的最优厚度2 cm,且数值分析和实验结果表明玻璃纤维厚度对吸声系统影响很大。以上所有这些在吸声材料后使声压最小的控制方法后来被Beyene简称为释压法。

图3 Thenail的实验结果
1997年Beyene提出了一种新的主被动混合吸声方法,该方法使吸声材料背后声阻抗与空气特性阻抗相匹配来达到吸声的目的,称之为阻抗匹配法。通过使吸声层后面的反射声最小便可实现阻抗匹配条件,实验结果如图4所示,在100~2 000 Hz范围内均有较好的吸声效果,且吸声层厚度对吸声系统影响不大[6]。1999年Smith等在Beyene的基础上针对宽带信号进行了更深入的实验研究[7],并对释压法和阻抗匹配法进行了实验比较,同样得出阻抗匹配法优于释压法的结论。

图4 Beyene的实验结果
2003年H zhu采用阻抗匹配法及FXLMS算法,对管道中声波进行了反射声控制研究,实验中没有被动吸声材料,结果表明,1 kHz以下反射声吸声效果可以达到20 dB左右,如图5所示[1]。Cobo用一个简单的基于平面波传播的分析模型比较了释压法和阻抗匹配法,发现释压法的吸声效果比阻抗匹配法更好,但需要特定的几何条件和材料特性[8]。
2007年Cobo等还在三维空间中进行了主被动混合吸声研究,如图6所示,主动控制单元在混合主被动微穿孔吸声体的后面,由四个完全相同的独立单元组成,每一个独立单元都作为局部的主动控制系统,微穿孔板后面的麦克风接收声压信号后通过FXLMS算法激励扬声器发声,达到主动吸声的目的。实验结果表明,对于200~400 Hz范围内的低频信号,通过主动吸声,可以把吸声系数从0.2~0.4提高到0.72~0.75[9]。

图5 H zhu的实验结果

图6 在消声室中的混合主被动微穿孔吸声体的前视图(左)和后视图(右)
国内沙家正于1981年最早研究了管道有源消声问题,1990年吕广庆研究了空间声场有源声吸收中的多极源结构问题,1991年马大猷开始对室内声场的有源控制问题进行探讨。近年来,南京大学的史东伟在空气声管中开展了利用吸声尖劈作为被动材料的主被动吸声技术研究,实验结果如图7所示,结果表明在100~1 000 Hz内吸声系数可以达到0.98~1.00,效果非常好[10]。
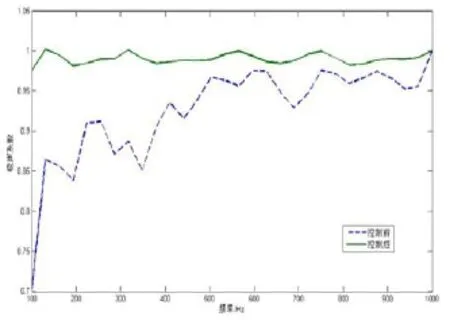
图7 控制前后吸声尖劈的吸声系数
3 水中主动吸声研究进展
在水声领域,国外从20世纪90年代中后期开始水下主动吸声技术研究。1992年宾夕法尼亚大学的Howarth利用两个水听器接收信号,一个反馈控制系统驱动发射换能器实现反射声波的主动吸收[11],如图8所示,取得了较好的吸声效果,同时给出了双水听器的间距与吸声效果之间的关系。

图8 双水听器主动吸声示意图
1991年,密西西比大学的Lafleura利用DSP作为主动控制系统平台,实现了主动控制系统的实时信号处理[12]。1995年美国海军研究所的Corsaro提出了一种集成的多层结构的主动消声瓦[13],如图9所示。该主动消声瓦包括振速传感器、声压传感器及发射换能器。传感器接收声信号并进行声波分离,然后通过控制器进行主动控制,在消声瓦表面获得与水阻抗相匹配的声阻抗,从而达到吸声的目的。该消声瓦基本解决了多个声学构件集成的问题,已经非常接近实际应用,但仍需解决布成阵列后所面临的诸多问题。

图9 智能消声瓦结构示意图
在国内,北京航空航天大学的唐俊利用PVDF发射换能器作为次级声源,在水声脉冲声管中开展了主动吸声实验研究[14]。采用时延法进行声波分离,对较宽频段内的信号均取得了较好的吸声效果,如图10所示,但双传感器和发射换能器完全分离,没有集成在一起。
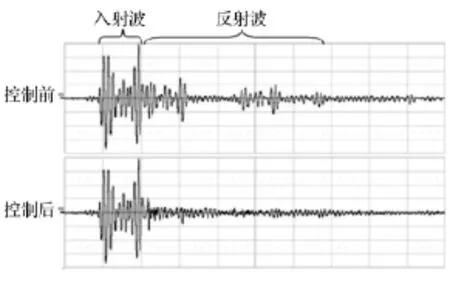
图10 水声声管主动吸声实验结果
中国科学院噪声与振动重点实验室的王晓琳在水声驻波管中开展了主动吸声研究[15],采用积分法进行声波分离,信号形式包括单频信号、调频信号和带限白噪声,实验结果如图11所示。总体上高频段效果好于低频段,这可能是由于在低频段声管底部存在二次反射引起的。实验时仍然使用分离器件进行主动控制,离应用还有一定差距。此外他们还提出了利用矢量传感器进行水下主动吸声的设想[16],但只进行了仿真分析。

图11 水声声管宽带主动吸声实验结果
4 结语
主动吸声技术在空气中已经得到一些应用,比如主动消声耳机、驾驶舱的主动消声等,这些应用一般集中在封闭空间中,而用于水下还有一些困难,主要体现在:
1)水下应用必须采用集成器件的方式,这样不可避免地会引入声学构件相互间的耦合问题,这给声波分离带来很多困难。
2)即使采用集成器件,但水中声速很快,导致系统延时很小,需要解决主动控制系统的非因果性问题,尤其是针对宽带信号。
尽管主动吸声技术还存在一些难点,但并不妨碍技术本身的发展,目前的发展趋势主要有:
1)针对大面积的应用,发展多通道并行处理技术,优化次级声源的配置,采用最小代价实现最大区域的主动吸声。
2)针对实际应用中可能出现的瞬态非平稳振动及噪声问题,发展宽容、快速的自适应滤波算法,确保算法的快速收敛。
[1] ZHU H, RAJAMANI R, STELSON K A.Active control of the acoustic reflection, absorption, and transmission using thin panel speakers[J].JASA,2003,113:852-870.
[2] OLSON H F, MAY E G.Electronic sound absorber[J].JASA, 1953, 25:1130-1136.
[3] OLSON H.Electronic control of noise, reverberation, and vibration[J].JASA, 1956, 28:966-972.
[4] GUICKING D, LORENZ E.An active sound absorber with Porous Plate[J].J.Vib.Acoust,Stress Reliab.Design, 1984, 106:389-392.
[5] THENAIL D, GALLAND M, SUNYACH M, et al.Active enhancement of the absorbent properties of a porous material[J].Smart Mater.Struct.1994, 3:18-25.
[6] SAMSON BEYENE, RICARDO A BURDISSO.A new hybrid passive/active noise absorption system[J].JASA, 1997,101(3):1512-1515.
[7] JEROME P SMITH, BRODY D JOHNSON, RICARDO A BURDISSO.A broadband passive-active sound absorption system[J].JASA, 1999, 106(5):2646-2652.
[8] PEDRO COBO, ALEJANDRO FERNANDEZ.Low-frequency absorption using a two-layer system with active control of input impedance[J].JASA, 2003,114(6): 3211- 3216.
[9] PEDRO COBO, MARIA CUESTA.Hybrid passive-active absorption of a microperforated panel in free field conditions[J].JASA, 2007,121(6):251-255.
[10] 史东伟.有源吸声尖劈的研究[D].南京大学, 2009.
[11] THOMAS R HOWARTH, VIJAY K VARADAN, XIAOQI BAO, et al.Piezocomposite coating for active underwater sound reduction[J].JASA,1992,91(2):823-831.
[12] LAFLEUR L D, SHIELDS F D.Acoustically active surfaces using piezorubber[J].JASA, 1991, 90:1230-1237.
[13] CORSARO R D, HOUSTON B.Sensor-actuator tile for underwater surface impedance control studies[J].JASA, 1997,102(3):1573-1581.
[14] 唐骏,王同庆.基于压电智能材料的自适应吸声实验研究[J].振动与冲击,2011,30(3): 150-160.
[15] 王晓琳,刘碧龙.水声管中主被动复合方法的实验研究[C].第十三届船舶水下噪声学术会, 2011:508-511.
[16] 王晓琳,王大宇,刘碧龙.基于矢量水听器的水下有源吸声研究[J].声学技术,2009, 28(5):225-226.
