基于被动声呐节点的区域配置优化方法仿真
2016-11-16郭斐斐葛辉良郑佳
郭斐斐 葛辉良 郑佳
(第七一五研究所,杭州,310023)
基于被动声呐节点的区域配置优化方法仿真
郭斐斐 葛辉良 郑佳
(第七一五研究所,杭州,310023)
为实现大范围海区内多声呐节点有效探测,提出了配置优化原则。建立了优化目标函数模型,并给出了优化求解算法。仿真分析了被动探测工作方式的信号余量、探测覆盖范围、探测概率分布;并对被动声呐节点配置优化进行了仿真。仿真结果表明,采用最快上升法可减小配置优化运算量;采用多节点联合探测可增大探测覆盖范围、提高探测概率。文章结果可为后续大范围、多类型声呐节点的区域配置优化提供参考。
被动声呐;配置优化;信号余量;探测概率
近年来,潜艇隐身性能的不断提高,单探测节点对水下航行潜艇的探测距离有限,难以对潜艇目标持续跟踪和有效识别[1]。为实现对大范围海区(区域)内活动潜艇的有效探测,需布设多个探测节点。按当前常规信息集成方法,各节点独立进行探测,输出目标方位、距离、类型等信息,汇总形成区域目标态势。但此方法不能充分发挥多节点联合检测的效能。综合考虑各类探测节点的类型、数量、位置、工作方式和参数后,对系统内所有节点进行配置优化,通过对各类节点探测信息的集成和综合处理,能够实现对大范围海域水声目标的侦察监视[2]。因此,研究配置优化方法对于水声设备系统部署和完成作战使命任务有重要意义。
1 区域水声系统配置优化方法
1.1 配置优化原则
对于多种可供选择的探测节点构成区域水声系统时,配置优化原则变得复杂,可以衍生出新的配置优化原则。例如与地理位置、建设成本等因素有关时,可以选用最小代价原则进行配置优化。基本原则如下:
(1)最少节点数原则。对于划定区域,给定覆盖面积占比要求,优化探测节点位置使探测节点数最少。
(2)最大覆盖面积原则。对于划定区域,给定探测节点数,优化探测节点位置使探测覆盖面积最大。
(3)最大探测概率原则。布设水声探测节点的目的是为了检测到从某一方向突然撞入的潜艇,对于划定区域,应使潜艇在该区域以任意航迹通过时被发现的概率最大。
1.2 配置优化目标函数
1.2.1 探测覆盖面积目标函数
该目标函数表示可探测到水下目标的面积在划定面积中的占比。采用信号余量(SE)作为可探测的判据[3]:

设整个划定区域分成K个单元,对每个单元(i)进行可探测判决。每个单元的信号余量应为探测节点位置(X)和单元位置(Y)的函数。显然,探测覆盖面积占比也应为探测节点位置的函数[1],即:

1.2.2 探测概率目标函数
探测概率(Pd)是目标被声呐发现的概率,取决于信号余量和检测阈[4],即:

其中,信噪比(SNR)为信号余量(SE)和检测阈(DT)之和。在声呐设计时,通常信号余量为0时,对应检测概率为0.5、虚警概率为10-4,上式可以修改为:

当多个探测节点构成区域水声系统时,采用信息增益评价位于某个航迹点目标的综合探测性能:

式中,I(X,Y)为Fisher信息矩阵,为定位误差协方差矩阵R(X,Y)的逆;Yij为第i个航路第j个航迹点的位置;V为探测节点的合集。
被探测到的目标函数为:

随着配置节点的数量、探测范围、探测概率等变化,目标函数发生变化;当目标函数最大时,即为系统探测节点的最优配置。
1.2.3 信号余量的计算
信号余量和工作方式有关。对于被动声呐工作方式,信号余量的表达式为:

式中,SL为目标声源级、NL为噪声级、AG为阵增益、TL为传播损失。
1.2.4 配置优化算法
配置优化的维数等于区域内探测节点数量。当区域内探测节点数较少时,可以采用全局网格寻优搜索方法求得最优配置。但当区域内存在多个探测节点时,全局网络寻优搜索运算量很大,需要运行快速算法。以下介绍几种最优求解快速算法。
(1)最速上升法
设所有探测节点的位置为:


其中,k为迭代次数,∇f(Yk)为目标函数的梯度,为迭代系数。由于目标函数一般难有解析表达式,采用数值计算的方法近似计算目标函数的梯度:

其中,h在每个梯度方向上是固定的,ei为偏导数计算方向上的单位向量。当目标函数达到极大值时,其梯度接近为零。
(2)网格最速上升法极值法
当目标函数在全局范围内只有一个极大值点时,该值出现则迭代结束,采用最速上升法对目标函数在全局范围内得到的结果就是最优配置。但当目标函数在全局范围内有多个极大值点时,采用最速上升法得到的结果受初值的影响,将在初值附近的极大值点收敛,从而得到的目标函数极大值点对应的多基地声源-接收机对组合,不一定是全局最优的,可能只是局部最优的一种配置。为了避免出现目标函数极大值点并非全局的最大值点,所以采用对整个搜索区域划网格进行快速计算的方法得到最优配置结果。具体算法如下:
· 将搜索区域划块,以每区块中心点为最速上升法的初值点进行迭代计算,算法将在初值点附近的函数的极大值点收敛,即停止迭代,得到目标函数区块的极大值点。
· 对得到的所有目标函数极大值,求取其中的最大值,以该值作为目标函数在全局范围内的最大值,其对应的探测节点位置即为最优配置。
2 配置优化仿真
2.1 仿真的目标和环境参数
2.1.1 水下目标参数
以低噪声潜艇为目标。浅海条件下目标深度为50 m,深海条件下目标深度为150 m。
2.1.2 海洋环境参数
· 浅海海域
典型海深100 m;海洋环境噪声为64 dB@1kHz,200 Hz以下区域,200 Hz以上按每倍频程6 dB衰减;海底底质为泥沙底,密度1.64 g/cm3,声速1 600 m/s,吸收系数0.6 dB/λ;水文条件为弱负梯度,海面声速为1 530 m/s,声速梯度为g=-0.05 s-1。
· 深海海域
典型海深3 000 m;海洋环境噪声为64 dB@1kHz,200 Hz以下区域,200 Hz以上按每倍频程6 dB衰减;海底底质为泥沙底,密度1.64 g/cm3,声速1 600 m/s,吸收系数0.6 dB/λ;水文条件为:海面声速c0=1 540 m/s,0~100 m时梯度g1=-0.1 s-1,100~1 000 m时梯度g2=-0.055 s-1,1 000 m以上梯度g3=0.016 s-1。
2.2 单节点工作方式信号余量及探测概率仿真
浅海条件下,被动声呐单节点工作时的信号余量及探测概率见图1(图中横纵坐标表示200 km×200 km节点布置区域,下图同)。根据二值化信号余量分布可求得,当单节点置于区域内时,覆盖面积为1 600 km2,占比为4%。
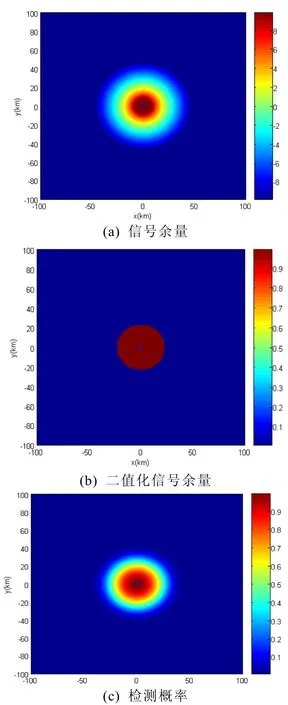
图1 浅海环境被动声呐单节点探测(*为探测节点位置)
深海条件下,被动声呐单节点工作时的信号余量及探测概率见图2,根据二值化信号余量分布可求得,当单节点布置于200 km×200 km区域内时,覆盖面积为1 785 km2,占比为4.5%。


图2 深海环境被动声呐单节点探测(*为探测节点位置)
2.3 双节点工作方式探测概率及覆盖范围仿真
多节点的联合检测是采用将探测区域按空间坐标网络化,并将集成处理后的信息分发到各网络,对各网格内的多源、多类型信息进行关联及融合处理,形成多维度点迹分布;利用跟踪算法(如多假设检验跟踪)对目标进行跟踪处理,提取各维度跟踪轨迹;进一步进行多维度跟踪轨迹融合[5].
在浅海条件下,被动声呐双节点工作时的联合检测概率及覆盖范围见图3,两个节点间距40 km。图中还给出了单节点覆盖范围相加结果。当双节点布置于200 km×200 km区域内时,多传感器联合检测覆盖面积为3 361 km2,占比为8.4%;单节点覆盖范围相加为3 211 km2,占比为8.0%。


图3 浅海环境被动声呐双节点探测(*为探测节点位置)
在深海条件下,同样布置的被动声呐双节点被动工作方式时的联合检测概率及覆盖范围见图4,联合检测覆盖面积为3 808 km2,占比为9.5%;单节点覆盖范围相加为3 322 km2,占比为8.3%。


图4 深海环境被动声呐双节点探测(*为探测节点位置)
2.4 多个被动声呐节点位置配置优化
设定200 km×200 km的警戒区域,对10个被动声呐节点的部署位置采用最速上升法优化。初始位置随机产生,经50次迭代后,优化结果见图5。对应的警戒范围和探测概率分布见图6。经优化后,探测覆盖范围由初始的13 494 km2增大到19 803 km2,区域覆盖比例由33.7%上升到49.5%。

图5 对10个被动声呐节点位置进行优化(浅海,上图为优化后的节点位置,下图为探测范围面积收敛曲线)

