天绘一号卫星三线阵CCD影像的近似核线生成
2016-11-15赵春川
赵春川, 纪 松, 唐 勇
1.第四测绘导航基地,四川 成都,610000;2.信息工程大学地理空间信息学院,河南 郑州,450052
天绘一号卫星三线阵CCD影像的近似核线生成
赵春川1, 纪松2, 唐勇1
1.第四测绘导航基地,四川 成都,610000;2.信息工程大学地理空间信息学院,河南 郑州,450052
本文基于航天线阵CCD影像物方投影“核曲线”的固有性质,在影像PRC定位参数的支持下,给出了一种基于UTM投影基准面的核线影像生成方法。分析了影像匹配技术对核线影像基准的特定要求,在固定、统一的物方投影基准面下,进一步给出了一种航天线阵CCD影像的固定基准核线影像生成方法。同时,利用“天绘一号”卫星三线阵CCD影像进行了实验。结果表明,本方法能够通过单次核线影像重采样,生成物方空间一致、基准固定、消除了上下视差的核线影像。
天绘一号;三线阵CCD影像;投影基准面;UTM投影;核线
1 引 言
在数字摄影测量中,航空航天遥感影像的自动化处理过程均直接或间接使用了核线几何约束条件,以减小影像匹配的搜索范围、提高影像匹配的可靠性,即核线影像具有重要的应用价值[1]。对于传统的航空面阵影像而言,其核线影像重采样理论、方法和技术比较成熟。航天传感器通常采用线阵CCD推扫成像,其特殊的成像方式和物理结构,对其核线影像的获取带来了一定的难度。
国内外学者对航天线阵传感器的核线影像制作方法与技术进行了深入研究。巩丹超对基于“有理函数模型”(Rational Function Model, RFM)的线阵CCD影像进行了分析,研究结果表明:线阵CCD影像的核线通常是“核曲线”,并不是严格意义上的核线,只能通过近似的手段,获取近似核线及其核线影像[2]。Kim、张永生和Habib等研究学者发现“核曲线”是类似双曲线的曲线,在一定的范围内,可以看作近似直线,而且与同名像点对应的核线一一对应,这就为航天线阵CCD影像的核线重采样提供了理论依据[3-5]。胡芬、张永军和Morgan等学者对航天线阵CCD影像的核线重采样方法进行了深入研究,分别给出了各自的近似核线影像生成方法[6-8]。虽然这些方法各有差异,但是都采用近似核线重采样的方法,获取核线影像。综合国内外研究学者的研究成果,航天线阵CCD影像近似核线影像生成方法通常可分为如下几类:多项式拟合近似核线生成方法、基于投影轨迹法的扩展核线模型、基于物方投影基准面的核线影像生成方法等。由此可见,航天线阵CCD影像的核线理论并未统一,也未形成一种通用的核线理论和模型,高精度、高效率的核线重采样方法仍然值得深入研究。
“天绘一号”卫星(TH01)是2010年中国发射的第一颗立体测绘卫星[9],它包括三线阵立体测绘相机、多光谱相机、高分辨率相机等传感器载荷,为国内各行业的研究和应用提供了丰富的卫星影像数据。本文主要针对“天绘一号”卫星的三线阵CCD影像,采用基于物方投影基准面的核线影像生成方法,在影像有理多项式系数(Rational Polynominal Coefficients, RPC)定位数据的支持下,实现了卫星影像的近似核线重采样;同时,文章从三线阵CCD影像立体匹配的特定要求出发,对近似核线影像进行了多基线分析和处理,提高了近似核线影像的多基线匹配应用性能。
2 基于物方投影基准面的线阵CCD影像核线几何
2.1基本思想及理论基础
给出两张具有一定重叠的航天线阵CCD影像,建立物方直角坐标系。在该坐标系中,选取一个高程H(该高程通常为测区平均高程),将其对应的平面作为“物方投影基准面”。设某一地面点在左右影像上的像点分别为p1和p2,在局部地面范围内,像点p1和p2的投影轨迹为“核曲线”。研究表明:“核曲线”近似为直线且互相平行,为此可以将像点p1和p2的“核曲线”定义为同名核线;在“物方投影基准面”上,影像上所有同名像点的投影点轨迹都可以用同名核线来表示,这些同名核线互相平行。由于同名像点的同名核线近似为直线且互相平行,因此它为航天线阵CCD影像的近似核线影像分析提供了理论基础。
依据上述理论基础,以重叠影像上的地面点为分析对象,获取各地面点在“物方投影基准面”上的投影轨迹,随后沿着“核曲线”的近似直线方向,将所有地面点的投影轨迹重新排列,进而通过影像重采样,得到一组相互平行的近似核线影像,这就是航天线阵CCD影像的基于物方投影基准面的核线几何分析基本思想,为航天线阵CCD核线影像的自动生成提供了一种技术途径。
2.2基于UTM投影基准面的核线影像生成
“天绘一号”卫星三线阵CCD影像采用了当前主流的通用传感器几何模型——RFM模型[4]。RFM模型通常由RPC参数描述,实现像点坐标与大地坐标的关联。依据基于物方投影基准面的线阵CCD核线影像几何的基本思想,在得到“天绘一号”卫星三线阵CCD影像及其RPC参数后,可以按照下列技术步骤,实现近似核线影像生成。
(1)确定UTM投影基准面。
给出“天绘一号”卫星三线阵CCD影像。由于影像的RPC参数给出了像幅的经纬度范围,因此可以根据此参数,采用通用横轴墨卡托投影(Universal Transverse Mercator Projection,即UTM投影,是一种横轴等角割椭圆柱面投影)方法[10],计算影像所在的UTM投影带,并选择UTM投影坐标系的X-Y平面为投影基准面。实际上,根据需求的不同,也可以选择高斯投影或者其它投影方法,确定投影基准面。
(2)在UTM投影基准面上,确定核线的“近似直线”排列方向。
如图1所示,给定两张“天绘一号”卫星三线阵CCD影像,在左影像上选择中心点A,获取影像区域的平均高程(可通过全球DEM数据获取),利用影像像点和高程,在设置的高程变化条件下(通常为20m或者为影像地面分辨率的4倍),根据RPC参数及其模型,计算像点A的经纬度坐标,然后计算其UTM投影坐标(P1和P2)。
根据P1和P2的UTM投影坐标,将其转换至经纬度坐标,并根据RPC参数,将其反算至右影像,获取像点B、C。
根据右影像上像点B、C的像坐标和RPC参数,将其投影至UTM基准面,获取其UTM投影坐标,得到点P3和P4。
利用点P3和P4构建直线方程,该直线方向即为A点的近似核线排列方向。
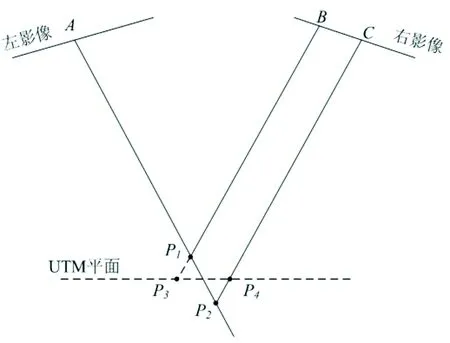
图1 “近似直线”排列方向的确定
上述坐标转换涉及到的计算公式有:
(1)
式(1)中,f1表示利用像点坐标(S,L)和高程height,根据RPC反解参数,计算经纬度坐标(lat,lon);f2表示利用经纬度坐标和高程,根据RPC参数,计算像点坐标;f3表示利用经纬度和高程坐标,计算UTM投影坐标(X,Y,Z);f4表示利用UTM投影坐标,计算经纬度和高程坐标。
(3)计算左右影像的重叠范围。
确定影像的近似核线排列方向之后,在测区平均高程的基础上,分别计算左右影像四个角点在投影基准面内的覆盖范围,并选取两投影覆盖范围的最小外廓矩形,作为核线影像重采样区域,确保左右核线影像具有相同的行列数,且同名核线对应的行号相同。
(4)近似核线影像重排列。
根据输入影像的地面分辨率(GSD),将核线影像重采样区域进行规则划分,确定核线影像的行列数。采用类似数字微分纠正的方式,根据各个格网点的平面坐标、平均高程,计算其在左影像和右影像上的像点位置,将灰度内差结果赋给核线影像,生成左右核线影像。
其中,核线影像像点与原始影像像点坐标换算严格关系如图2所示。

图2 核线影像像点与原始影像像点坐标换算关系
图2中,近似核线影像像点坐标和UTM平均高程面坐标的计算公式如下:
(2)
式(2)中,(xe,ye)是核线影像上的像点坐标;(X,Y)为(xe,ye)在UTM高程投影面上的坐标;G为影像地面分辨率,通常为常数;R为“近似直线”排列方向所确定的二维坐标变换矩阵;(X0,Y0)为坐标平移量,通常取核线影像左上角点在UTM高程投影面上的坐标。
3 天绘一号卫星三线阵CCD影像的固定基准核线影像生成
3.1影像匹配技术对核线影像基准的要求
“天绘一号”卫星的飞行过程中,在同一飞行条带上,三线阵立体测绘相机能够获取地面目标的前视、下视和后视影像。如果将前视、下视和后视影像用于构建立体,则会得到不同组合形式的立体像对。分别对各个立体像对进行匹配分析、质量检查,再将各个立体像对的匹配结果进行融合,这是常用的影像匹配方法。但是,这类影像匹配方法具有一定的缺点:
(1)举例来说,对于航天三线阵CCD影像而言,将下视影像设为基准影像I0,将前视和后视影像分别设为搜索影像I1和I2,如果将基准影像I0与搜索影像I1和I2进行核线分析,则会生成两对核线影像(I0e,I1e)和(I'0e,I2e)。此时,基准影像I0将会被重采样成两张核线影像I0e和I'0e,而I0e和I'0e两者并不一致,这增加了核线影像匹配的计算量;同时,在对核线影像进行基于像方的匹配时,由于核线影像的不一致,像方基准难以固定,给影像匹配带来了困难。
(2)在各个单立体的匹配过程中,如果使用核线影像,匹配分析与质量检查环节将相互独立,只是在匹配结果融合时,才将多个立体匹配结果进行综合分析,达到多张影像信息综合利用的目的。之所以匹配分析和质量检查环节相互独立,主要原因在于:即使对于同一张影像,其在不同的立体像对中生成的核线影像不同,无法统一匹配影像的核线基准。由于匹配影像的核线基准不统一,因此,不同影像匹配过程中难以进行交叉验证,这给匹配质量检查带来了一定的难度。
由于同一影像在不同立体中的核线影像不一致,所以影像匹配的像方基准难以统一、匹配质量检查难以交叉实现,航天三线阵CCD影像的信息难以充分、综合利用;特别是影像条带数量增多时,核线影像不一致造成的上述现象尤为明显,这使得影像匹配过程面临着一定的挑战。
为了充分利用航天三线阵CCD影像信息,在统一的核线影像基准下,通过交叉质量检查的方式,获取更加可靠的影像匹配结果,需要对航天三线阵CCD影像的核线几何进行深入分析,进而在不同立体像对中,对同一幅影像,获取基准统一的核线影像。
3.2固定基准核线影像生成方法
采用基于物方投影基准面的航天影像核线几何分析方法。由于核线“近似直线”排列,且各像点的核线方向一致(与传感器飞行方向相同),这恰好为基准统一的核线影像生成提供了技术基础:对于“天绘一号”卫星而言,由于同一条带影像像点的核线方向一致,且与传感器飞行方向相同,于是可以用固定的、统一的物方投影基准面,将航天三线阵CCD影像进行核线几何分析,生成物方空间一致、消除上下视差的三线阵CCD核线影像。其具体步骤和技术方法如下:
步骤一:根据“天绘一号”卫星三线阵CCD影像的RPC参数,以下视影像为基准(同样可以以前视、后视影像为基准),在平均高程条件下,确定UTM投影基准面。其中,平均高程确定方法有多种:可以根据全球高程数据(如SRTM数据[11])来确定;也可以通过特征点(如SIFT特征点[12])稀疏匹配,进而获取特征点的平均交会高程。
步骤二:在固定的UTM投影基准面下,根据“天绘一号”卫星三线阵CCD影像的RPC参数,通过图2所示的坐标换算关系,确定前视、下视和后视影像的“近似直线”排列方向;如果所有重叠影像的“近似直线”排列方向相同,则继续下面的分析步骤,否则返回。通常,对于“天绘一号”卫星而言,由于卫星沿设定轨道飞行,同一条带的三线阵CCD影像的“近似直线”排列方向相同,不同条带的三线阵CCD影像的“近似直线”排列方向也相同(对应同一地区)。如果卫星传感器发生侧摆,且三线阵CCD影像的侧摆角不同,则“近似直线”排列方向不一致。
步骤三:在平均高程条件下,根据影像的RPC参数,分别计算各张CCD影像的地面覆盖范围,同时计算地面覆盖范围的最小外廓矩形(注意:这里是前视、下视和后视影像地面覆盖范围的最小外廓矩形),作为核线重采样的地面范围基准。其中,平均高程不同,核线重采样的地面范围基准略有差异,但并不影响核线影像重采样的分析与计算。
步骤四:根据影像的地面分辨率大小,将核线重采样的地面范围进行规则划分,得到核线影像的行列数,并依据地面坐标、影像的RPC参数,分别向多张CCD影像进行像方投影和核线重采样,获取多组核线影像。
从上述步骤可以看到,基准统一核线影像生成的主要核心点在于:采用基于物方投影基准面的航天影像核线几何分析方法、具备相同的高层基准、以任意一张三线阵CCD影像为基准计算重叠地面范围。依据上述步骤,“天绘一号”卫星三线阵CCD影像的核线影像只需要生成一次,且同名点在所有核线影像上都位于同一扫描行,为影像匹配技术的应用提供有利条件,即能够生成物方空间一致,基准统一,且同时消除了上下视差的三线阵CCD核线影像。
4 实验与分析
4.1实验数据
实验数据为“天绘一号02星”获取的河南省境内某地区的三线阵CCD影像,影像中心位置为东经112.59°、北纬34.222°,影像获取时间为2013年4月26日,其定位参数为RPC,实验区高程范围为150 ~ 1100m,平均高程约为300m。文中利用了其中一条航带上的前视、下视与后视全色影像。
4.2核线重采样与分析
以三线阵CCD影像中的下视影像作为基准影像,根据2.2小节中描述的实验步骤,分别对前视、下视和后视影像数据,利用基于物方投影基准面的航天影像核线几何方法进行重采样处理。实验中采用的物方投影基准面为UTM投影面,投影带为第49带(根据测区的经度计算),坐标原点(X0,Y0)为下视影像的左下角点,平均高程Z0为300.0m(根据测区平均高程计算),具体参数如表1所示。
在UTM投影面条件下,计算各张影像的“核曲线”,实验表明“核曲线”为“近似直线”,且前视、下视和后视CCD影像的排列方向基本一致。其中,“近似直线”(倾角为-79.212°)的二维坐标变换矩阵R如表1所示。
表1投影基准面与核线重采样参数

数据X0(m)Y0(m)Z0(m)R天绘影像613218.3202913767235.138617300.0000000.189473 0.981886-0.981886 0.189473éëêêùûúú
根据表1中给出的投影基准面与核线重采样参数,计算前视、下视和后视影像数据的重叠区域,并依据重叠区域分别对各张影像数据进行核线重采样,结果如图3所示。
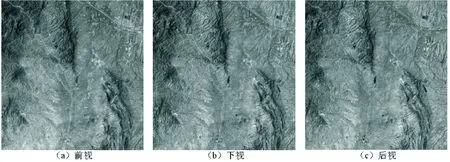
图3 天绘一号三线阵CCD影像的核线影像
根据图3中给出的核线影像,从中提取SIFT特征点对,并选取其中的12组同名特征点对(已经经过目视验证,特征点对准确、无误)进行上下视差分析,结果如表2所示。同时,根据表2给出的上下视差结果,对其进一步统计分析,结果如表3所示。
表2中,像点(x0,y0)为同名像点在前视影像上的像素坐标;(x1,y1)为同名像点在下视影像上的像素坐标;(x2,y2)为同名像点在后视影像上的像素坐标;上下视差极大值是以y0坐标为基准,y1和y2减去y0所得坐标绝对值的极大值。
从表2中可以看出,利用实验数据生成的核线影像,三张核线影像的上下视差最大值为0.900像素,最小值为0.086像素,其平均值为0.420像素,中误差为0.232像素。这表明,本文所给出的方法能够依据RPC参数,较好地生成“天绘一号”卫星三线阵CCD影像数据的核线影像,且核线影像的物方空间一致,基准统一,同时,消除了上下视差,有利于影像匹配过程中像方基准的统一和匹配结果的交互验证。
表2核线影像上特征点对的上下视差结果(单位:像素)

特征点像点x0像点y0像点x1像点y1像点x2像点y2上下视差极大值1715.79792.010729.72592.673746.03192.2440.66323222.736127.8683237.250127.5273755.082127.4660.34134126.079622.7734141.122622.6404152.837622.3430.29742599.770794.5832629.092794.6852653.514794.4160.26952993.838883.4033015.651883.8673023.761883.4320.46461746.618950.7881755.622951.6881771.199951.7700.90077207.7241353.5147196.7051353.4417181.9721353.5270.08684130.5552196.2624146.9982196.1824190.9292196.3480.16697503.6374558.9427500.6554558.2987499.9904558.6460.644104004.6926293.6224002.8036293.6243996.6776293.7610.137114684.1499537.7754673.5669538.1214664.7939538.1580.34612453.54210601.176467.47810600.406477.17410600.9780.770137042.2148719.8697042.4358720.0237043.1788720.4010.378149857.0289888.9549841.1649888.6629825.2039888.8790.2921510540.82111303.28210534.39511303.82810525.91711304.1830.546
表3核线影像上特征点的上下视差统计分析(单位:像素)

统计项最大值最小值均值中误差统计值0.9000.0860.4200.232
依据图3中给出的核线影像对,对其进行分波段合成,生成红绿立体影像,结果如图4所示。利用红绿立体眼镜观察图4,可以看出,该红绿立体影像能够突出反映地形变化、建筑物高度和地形走势,且两张红绿立体影像均没有上下视差的负面影响,达到了红绿立体影像的立体显示效果。

(a)前视-下视 (b)后视-下视图4 天绘一号三线阵CCD红绿立体影像(核线立体)
5 结 论
本文对基于物方投影基准面的线阵CCD影像核线几何进行了分析,针对以RPC为定位参数“天绘一号”卫星三线阵CCD影像,给出了一种基于UTM投影基准面的核线影像生成方法。在此基础上,针对航天线阵影像匹配技术对核线影像的特定要求,对近似核线影像进行了基准统一分析和处理,给出了物方空间一致、上下视差消除的核线影像生成方法及步骤。利用“天绘一号”卫星三线阵CCD影像数据进行实验,实验结果验证了本文方法的正确性,生成的核线影像及其红绿立体影像为影像匹配技术的应用和地形信息的自动提取提供了更好的数据支持。
[1]张祖勋.从数字摄影测量工作站(DPW)到数字摄影测量网格(DPGrid)[J].武汉大学学报·信息科学版,2007,32(7):565-571.
[2]巩丹超,张永生,邓雪清.线阵扫描影像的核线模型研究[J].遥感学报,2004,8(2):97-101.
[3]Kim Taejung, Shin Dongseok, Lee Young-Ran. Development of a Robust Algorithm for Transformation of a 3D Object Point onto a 2D Image Point for Linear Pushbroom Imagery[J]. Photogrammetry Engineer and Remote Sensing, 2001,67(4):449-452.
[4]张永生,巩丹超,刘军等.高分辨率遥感卫星应用-成像模型、处理算法及应用技术[M].北京:科学出版社,2007.
[5]Habib A, Morgan M, Jeong S, et al. Epipolar Geometry of Line Cameras Moving with Constant Velocity and Attitude[J]. ETRI Journal, 2005,27(2):172-180.
[6]胡芬,王密,李德仁等.基于投影基准面的线阵推扫式卫星立体像对近似核线影像生成方法[J].测绘学报,2009,38(5):428-436.
[7]张永军,丁亚洲.基于有理多项式系数的线阵卫星近似核线影像的生成[J].武汉大学学报·信息科学版,2009,34(9):1068-1071.
[8]Morgan Michel, Kim Kyung-Ok, Jeong Soo, and Habib Ayman. Epipolar Resampling of Space-borne Linear Array Scanner Scenes Using Parallel Projection[J]. Photogrammetric Engineering and Remote Sensing, 2006,72(11):1255-1263.
[9]王仁享,胡莘,王建荣.天绘一号无控制点定位精度分析[J].测绘学报,2013,42(1):1-5.
[10]李国义,姚楚光.UTM投影及其变形分析[J].地理空间信息,2013,11(6):80-83.[11]陈俊勇.对SRTM3和GTOP030地形数据质量的评估[J].武汉大学学报·信息科学版,2005,30(11):941-944.[12]李晓明,郑链,胡占义.基于SIFT特征的遥感影像自动配准[J].遥感学报,2006,6(10):885-892.
Approximate Epipolar Generation of Three-line Array CCD Image of Mapping Satellite-1
Zhao Chunchuan1, Ji Song2, Tang Yong1
1. The Fourth Surveying and Mapping Navigation Base, Chengdu 610000, China 2. Institute of Geospatial Information, Information Engineering University, Zhengzhou 450002, China
Based on the properties of object projection epipolar curve of the space linear array CCD image, a UTM projection epipolar image generation method is put forward with RPC positioning parameters. The specific requirements of image matching technology for epipolar image benchmark are analyzed, and a fixed benchmark epipolar image generation method of space linear array CCD image is proposed based on a fixed and unified projection reference plane. Experiments are conducted using three-line array CCD images from Mapping Satellite-1, and the results indicate that the proposed method can successfully generate the desired epipolar images with consistent object space, fixed projection reference, and almost zero vertical parallax through single epiplolar resampling.
Mapping Satellite-1; three-line array CCD imagery; projection reference plane; UTM projection; epipolar line
2015-12-21。
地理信息工程国家重点实验室开放基金资助项目(SKLGIE2013-M-3-1)。
赵春川(1983—),男,工程师,主要从事摄影测量与遥感方面的研究。
P223
A
