全断面掘进机光纤陀螺捷联寻北系统
2016-11-11朱文博陈根林
朱文博,刘 宇,陈根林
全断面掘进机光纤陀螺捷联寻北系统
朱文博1,刘 宇1,陈根林2
( 1. 上海理工大学机械工程学院,上海 200093;2.中国煤炭科工集团上海有限公司,上海 200030 )
提出一种采用光纤陀螺捷联寻北系统来获得全断面掘进机机头方位角的方法,有效避免激光导向系统因机内不通视和粉尘烟雾等因素影响测量精度的问题。获取陀螺仪输出的地球自转角速度水平分量以及机载倾角仪输出的俯仰角与滚动角,通过坐标旋转变换进行陀螺敏感轴倾斜误差补偿,并利用地球自转角速度在载体坐标系各轴的分量构造公式消除纬度值,采用四位置寻北法计算出掘进机机头方位角。将系统安装于全断面掘进机中进行实验,得到寻北精度为0.07°,满足隧道施工要求。
导航设备;全断面掘进机;光纤陀螺;捷联寻北系统;四位置算法
0 引 言
为了保证全断面掘进机机头刀盘能按照设计线路推进,需要及时显示掘进机姿态,计算出与隧道中心线的偏差[1]。掘进机姿态通过方位角、俯仰角和滚动角来确定,通常俯仰角和滚动角由双轴倾角仪进行测量[2],方位角的测量相对是个难题。目前国内外隧道施工中广泛应用激光导向系统,其分类主要以掘进机上固定测点不同而分为两类:一种是采用布置在掘进机上一定距离的三个棱镜[3];另一种是在掘进机中部安装带有传感器的接收靶和一个棱镜,全站仪对电子标靶进行测量定位,同时为掘进机水平角的测量提供测量激光[4]。
本文提出了一种光纤陀螺捷联寻北系统,采用光纤陀螺感应地球自转角速度水平分量,转位机构转动四个位置消除陀螺漂移,双轴倾角仪补偿倾斜误差,从而实现快速、纬度未知下的高精度捷联寻北。
1 光纤陀螺捷联寻北系统测试方案
目前国内外隧道施工中广泛应用的是激光导向系统,但是采用激光测量会受到一定限制。其一,机身内部的设备和人员走动会造成机内不通视,激光无法发射到接收靶上;其二,在刀盘削土过程中产生粉尘和烟雾会对激光线路的传播产生影响。本文将光纤陀螺捷联寻北系统固定在全断面掘进机中,陀螺输出轴对准掘进机机头刀盘中心,寻北系统的方位角作为掘进机推进的方位角。转位机构带动光纤陀螺敏感轴指向不同角度方位采集数据,在完成光纤陀螺输出角速度的采集和得到掘进机机载倾角仪输出的俯仰角和滚动角后,调用四位置寻北算法解算出方位角。掘进机向前推进时方位角可能在不断变化,机身会产生振动、扭转和倾斜,导致光纤陀螺不能准确敏感地球自转角速度的水平分量,会对后续计算的结果产生影响。考虑到掘进机步进式的工作特点,选择掘进机暂停推进时采集陀螺数据。
2 光纤陀螺捷联寻北系统硬件平台
光纤陀螺可以敏感地球自转角速度的水平分量,通过安装于掘进机中的光纤陀螺寻北系统计算出掘进机的实时掘进方位,从而获得刀盘偏移量。转位机构用来带动光纤陀螺转到不同的角度位置采集数据,消除光纤陀螺漂移误差;倾角仪在隧道施工过程中普遍安装于机内用来测量掘进机的俯仰角和滚动角[5],用于寻北算法中的倾斜补偿;DSP及其相关接口电路主要负责传感器信号的采集、电机的控制等。
转位机构分为三个模块:旋转模块、转角测量反馈模块和定位锁紧模块。旋转模块通过固联在其轴上的旋转齿轮带动工作转台旋转,工作转台上安装光纤陀螺,供电和数据输出通过导电滑环传输;转角测量模块选用增量型光电旋转编码器,当编码器旋转到达既定位置时发送到位信号,电机停止转动;定位锁紧模块是用来锁紧工作转台,确保光纤陀螺在采集数据的时候其基准轴没有偏移。在获取编码器的到位信号后,轴系锁紧停止转动,陀螺开始采集数据。当电机反转时,轴系可以继续转动。转位机构内部结构示意图如图1所示。
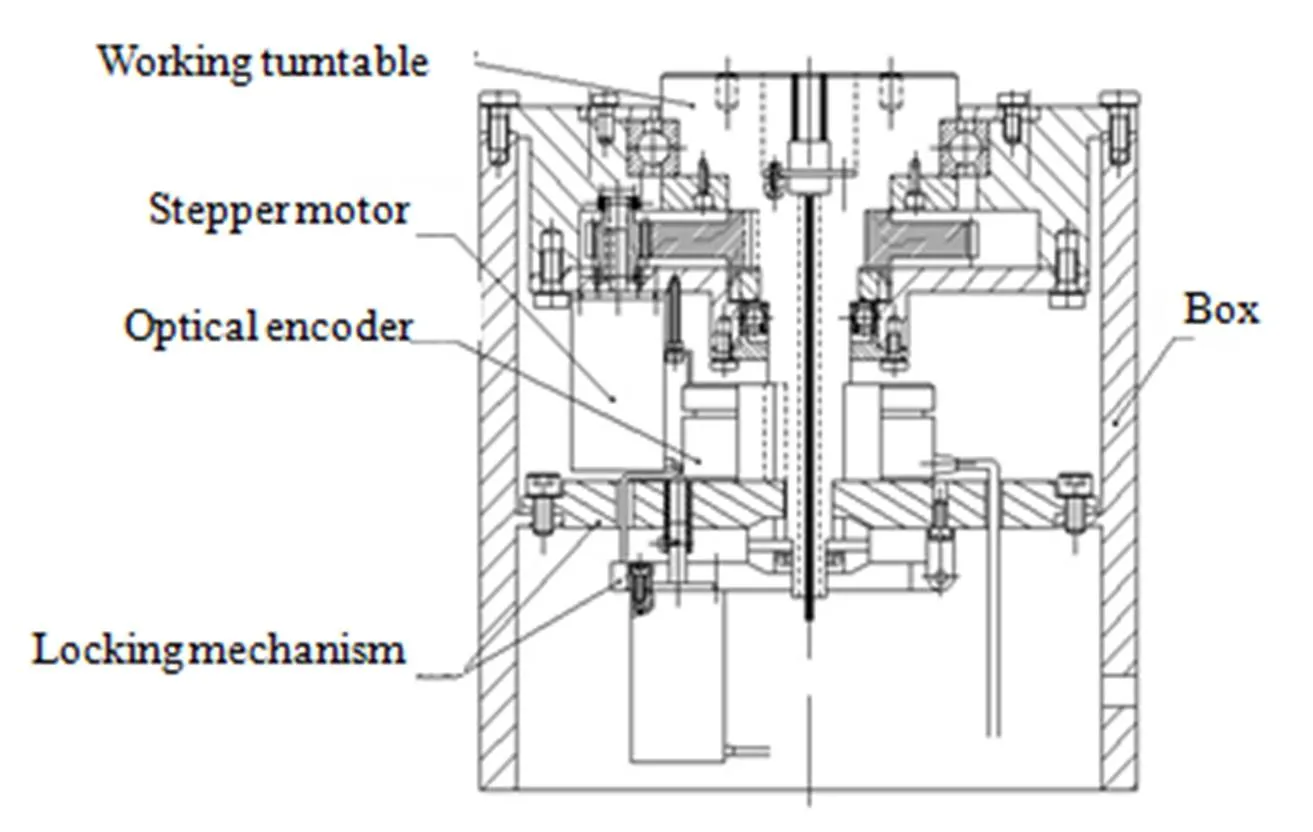
图1 转位机构内部结构示意图
3 四位置寻北算法
四位置寻北算法是利用光纤陀螺在四个位置的输出值,准确解算出地理真北方向与陀螺轴向的夹角,作为掘进机的方位角,从而实现高精度寻北[6]。陀螺仪敏感轴平行于基座平台绕转位机构转动轴分别旋转在0°、90°、180°、270°四个位置进行数据采集。利用掘进机中机载倾角仪输出的俯仰角和滚动角来对陀螺敏感轴进行倾斜补偿。一般的倾斜补偿算法需要用到纬度值,本文利用地球自转角速度在载体坐标系各轴的分量的构造公式可以得到纬度未知情况下的寻北算法,大大提高工作效率。
3.1 倾斜状态下四位置寻北模型
首先建立地理坐标系、载体坐标系和陀螺坐标系,如图2所示。三个坐标系的坐标原点重合,均为载体的几何中心,地理坐标系()中轴指向正北方向,轴指向正东方向,轴指向天方向;载体坐标系()中轴指向掘进机机头正前方向,轴与轴(正北方向)的夹角,即为掘进机方位角。轴指向载体正右方向,轴指向载体正上方向;陀螺坐标系()中,陀螺输出轴为轴。陀螺固定于转台上与转台同转,忽略安装误差时,陀螺系轴与载体坐标系轴始终重合。
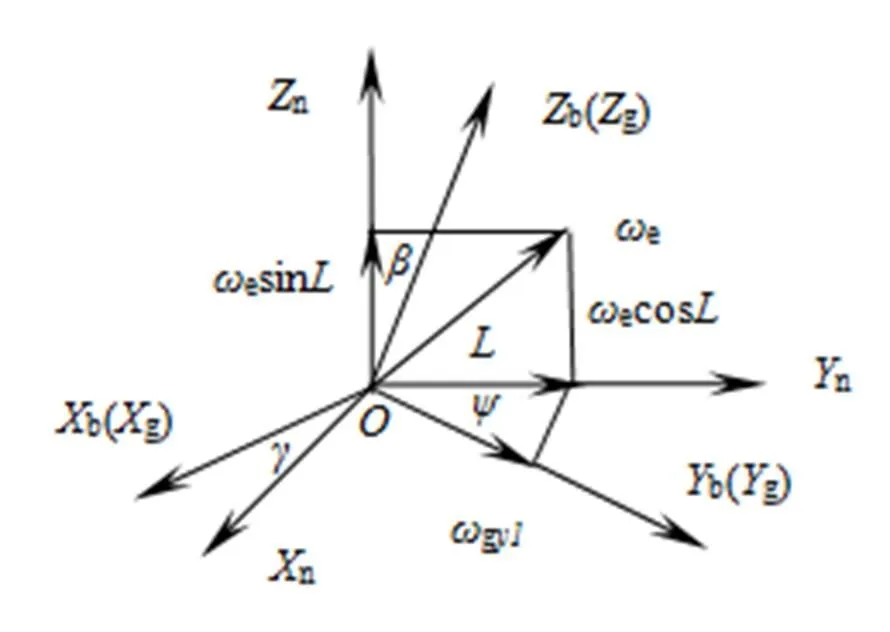
图2 地理系到载体系坐标变换

(1)
根据式(1)可得地球自转角速度在掘进机载体坐标系各轴的分量为

(3)
根据式(2)与式(3)可得地球自转角速度在陀螺坐标系中各轴分量为
(4)

3.2 消除纬度值的构造算法
忽略陀螺随机漂移,可知陀螺输出在对称的第一位置和第三位置、第二位置和第四位置分别相差一个负号,可以消除掉陀螺常值漂移,得到地球自转角速度在载体系轴与轴的分量:
(8)
把式(6)和式(7)代入式(8)可消除纬度值并得到方位角:

4 实际工况下实验验证
全断面掘进机向前推进10次,每次步进距离1.5 m,光纤陀螺寻北系统在掘进机每次暂停推进期间,采集机载倾角仪输出掘进机俯仰角与滚动角,并通过式(9)和判定条件计算得到10组方位角数据。在每次寻北系统计算方位角的同时,为了验证寻北系统的精度,进行长时间的人工前后标尺法测量,将得到的数据作为方位角参考值,得到10次误差均方差为0.07°,满足隧道施工要求,如表1所示。
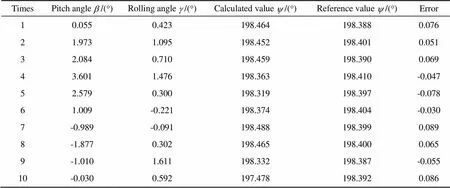
表1 实际工况下测量数据
5 结 论
构建了光纤陀螺捷联寻北系统,由转位机构带动陀螺敏感轴指向四个角度方位采集信号,将光纤陀螺的输出角速度和机载倾角仪输出的俯仰角和滚动角通过DSP传入上位机中;提出了四位置寻北算法,通过坐标系旋转变换进行陀螺敏感轴倾斜误差补偿,并构造公式消除纬度值,推导出倾斜状态下纬度未知的四位置寻北算法获得掘进机机头方位角;采用光纤陀螺寻北,有效避免了激光导向系统因机内不通视和粉尘烟雾等因素而影响测量精度的问题。在机内实际工况下测量得到0.07°的寻北精度,满足隧道施工要求。
参考文献:
[1] 张天瑞,于天彪,赵海峰,等. 数据挖掘技术在全断面掘进机故障诊断中的应用 [J]. 东北大学学报:自然科学版,2015,36(4):527-531,541.
ZHANG Tianrui,YU Tianbiao,ZHAO Haifeng,Application of Data Mining Technology in Fault Diagnosis of Tunnel Boring Machine [J]. Journal of Northeastern University:Natural Science,2015,36(4):527-531,541.
[2] 王彩,李月强,刘力双.顶管机自动导向水平角测量系统研究[J]. 光学技术,2015,41(3):239-242.
WANG Cai,LI Yueqiang,LIU Lishuang. Horizontal Angle Measurement of Automatic Navigation System of Pipe Jacking Machine [J]. Optical Technique,2015,41(3):239-242.
[3] 张厚美,古力.盾构机姿态参数的测量及计算方法研究[J].现代隧道技术,2004,41(2):15-20.
ZHANG Houmei,GU Li. On the Measurement and the Method of Computation of the Posture Parameters of Shields [J]. Modern Tunnelling Technology,2004,41(2):15-20.
[4] 吕国岭,黄威然,庞红军. 盾构自动导向方法的应用研究 [J]. 隧道建设,2005,25(5):11-14.
LÜ Guoling,HUANG Weiran,PANG HongjunResearch on Application of Automatic Guidance System in Shield Tunnelling [J]. Tunnel Construction,2005,25(5):11-14.
[5] 朱国力,文香稳,潘明华.曲线拟合在倾角仪测量误差补偿中的应用[J]. 华中科技大学学报:自然科学版,2010,38(5):83-85.
ZHU Guoli,WEN Xiangwen,PAN Minghua. Application of Curve Fitting to Compensation of Measurement Errors from an Inclinator [J].Journal of Huazhong University of Science and Technology:Natural Science Edition,2010,38(5):83-85.
[6] 王志乾,赵继印,谢慕君,等.基于倾斜补偿提高多位置捷联寻北精度的研究[J].系统仿真学报,2009,21(2):518-520.WANG Zhiqian,ZHAO Jiyin,XIE Mujun,. Study on Improving Precision of Multi-position Strap-down North-seeking Based on Slope Compensation Scheme [J]. Journal of System Simulation,2009,21(2):518-520.
[7] ROGERS R M. Applied Mathematics in Integrated Navigation Systems:Second Edition [M]. Virginia: American Institute of Aeronautics and Astronautics,2003:105-112.
[8] 王丽芬,谢英,杨功流,等.基于光纤陀螺的捷联寻北仪误差分析[J]. 光电工程,2011,38(5):46-51.WANG Lifen,XIE Ying,YANG Gongliu,. Error Analysis of the Strap-down North-finder Based on the Fiber Optic Gyroscope [J]. Opto-Electronic Engineering,2011,38(5):46-51.
[9] Eduardo S R,Vladimir A N. Comparison between Two Basic Schemes in Function of the True Earth’s North Detection [C]// International Conference on Integrated Navigation Systems,Saint Petersburg,Russia,May 29-31,2006,21:315-318.
[10] 王海明,李四海. 一种纬度未知的全姿态光纤陀螺寻北方法 [J]. 中国惯性技术学报,2014,22(1):63-66.
WANG Haiming,LI SihaiSeeking North Method for Fiber Optic Gyroscope North-seeker at All-attitude and Unknown Latitude [J]. Journal of Chinese Inertial Technology,2014,22(1):63-66.
[11] 张俊杰,李志全. 一种缩短闭环干涉式光纤陀螺仪(IFOG)预热时间的方法 [J]. 仪器仪表学报,2005,26(8):149-151.
ZHANG Junjie,LI ZhiquanA Novel Method to Shorten the Warm-up Time of Closed-loop IFOG [J]. Chinese Journal of Science Instrument,2005,26(8):149-151.
Fiber Optic Gyroscope Strap-down North-seeker of Full Face Tunnel Boring Machine
ZHU Wenbo1,LIU Yu1,CHEN Genlin2
( 1. School of Mechanical Engineering, University of Shanghai for Science and Technology, Shanghai 200093, China;2. CCTEG Shanghai Co., Ltd, Shanghai 200030, China)
In order to get the horizontal angle of the head of full face tunnel boring machine, a fiber optic gyroscope strap-down north-seeker is proposed, effectively avoiding the problems of bad visibility and smoke interference when using laser guiding system. The horizontal component of the earth's angular velocity is measured by fiber optic gyroscope, and elevation angle and roll angle of the tunnel boring machine is measured by inclinometer. Tilt error of gyroscope sensitive axis is compensated by coordinate rotation transformation. Moreover, latitude is eliminated by structural formulas using the components of the earth's angular velocity in the carrier coordinate. The horizontal angle of the tunnel boring machine can be calculated by four-position algorithm. The strap-down north-seeker is installed in a full face tunnel boring machine and can achieve 0.07°seeking north precision in the experiment of working condition, which satisfies the requirement of tunnel construction.
navigation equipment; full face tunnel boring machine; fiber optic gyroscope; strap-down north-seeker; four-position algorithm
1003-501X(2016)10-0001-05
U666.1
A
10.3969/j.issn.1003-501X.2016.10.001
2016-02-02;
2016-04-26
中国煤炭科工集团科研重点项目“全断面矩形快速掘进机的研制”
朱文博(1973-),女(汉族),山东泰安人。副教授,博士,主要研究工作是数字化设计及制造。E-mail: teacherzwb@163.com。