航空集群协同反隐身构型与机动策略
2016-11-11张佳强梁晓龙尹忠海
张佳强,梁晓龙,尹忠海,孙 强
(1.空军工程大学空管领航学院,陕西 西安 710051;2.空军工程大学理学院,陕西 西安 710051)
航空集群协同反隐身构型与机动策略
张佳强1,梁晓龙1,尹忠海2,孙强2
(1.空军工程大学空管领航学院,陕西 西安 710051;2.空军工程大学理学院,陕西 西安 710051)
针对航空集群独立反隐身的任务需求,提出使用集群任一成员机载雷达作为发射阵元,群内其他成员机载雷达作为接收阵元,构建多部双基雷达,利用雷达收、发分置带来的空间分集优势,在隐身目标不同方位探测其散射的电磁波,形成反隐身能力。研究了接收节点在不同距离和方位配置时形成的反隐身探测空域;针对机载雷达扫描角限制造成的前向空间探测盲区,提出了3种集群飞行器机动策略。仿真结果表明,航空集群各节点均能够形成一定的反隐身探测能力,不同集群构型能够适应不同威胁等级的反隐身任务需求;发射节点通过S形机动能够达成良好的雷达补盲效果。
航空集群; 反隐身; 机载双基雷达; 空间分集
0 引 言
具有集群智能的多类飞行器组成的任务集群是未来空中战场的主导力量[1-3],在可能面临的缺乏信息支援的孤立环境中独立作战的能力是航空集群要解决的重要问题[4],其中隐身与反隐身的对抗将贯穿作战行动的始终。研究表明,反隐身可采用空间、频率、极化、波形等多种技术途径[5-8],本文从隐身飞机雷达波侧向、前向散射大的空间分布特点出发,基于双基雷达空间分集思想,研究以有人/无人隐身飞机为节点的航空集群利用自身机载雷达协同反隐身的实现方法,提出使用航空集群任一成员作为发射阵元,群内其他成员作为接收阵元,通过优化布阵,形成对隐身飞机的有效探测。
目前,双基/多基雷达反隐身研究多集中在地基、海基等雷达平台之上[9-10],平台位置相对固定,而机载双基雷达则拥有更加机动、敏捷的构型产生与变换能力,能够针对隐身目标的动态适应性的改变双基雷达的空间部署,从而更加有利于双基雷达性能的发挥。此外,前向配置并采用无源方式探测目标的航空集群成员,能够避免自身雷达开机带来的暴露危险,实现先敌发现、隐蔽接敌,具有重要的战术意义。
1 协同反隐身空域覆盖模型
双基雷达方程[11]为
(1)
记
则
(2)
式中,Rt为雷达发射机至目标距离;Rr为雷达接收机至目标距离;Bbistatic为双基地雷达性能参数;σb为目标的双基雷达散射截面积。
Rt、Rr受到两个几何约束:
式中,Rb为雷达发射机与接收机之间的距离。
不考虑大气对雷达波的衰减,当双基地雷达性能参数Bbistatic确定后,只要确定了Rb、σb,就能计算出雷达的探测空域,并在此基础上进行多部机载双基雷达的空间部署构型设计。
1.1σb的影响
双基雷达散射截面积σb是收、发两地姿态角的函数[12]:
(3)
当σb为定值时,具有全向收、发能力的双基雷达探测边界的几何轮廓在任何含有发射-接收轴线的平面内都是Cassini卵形线[13],如图1所示。
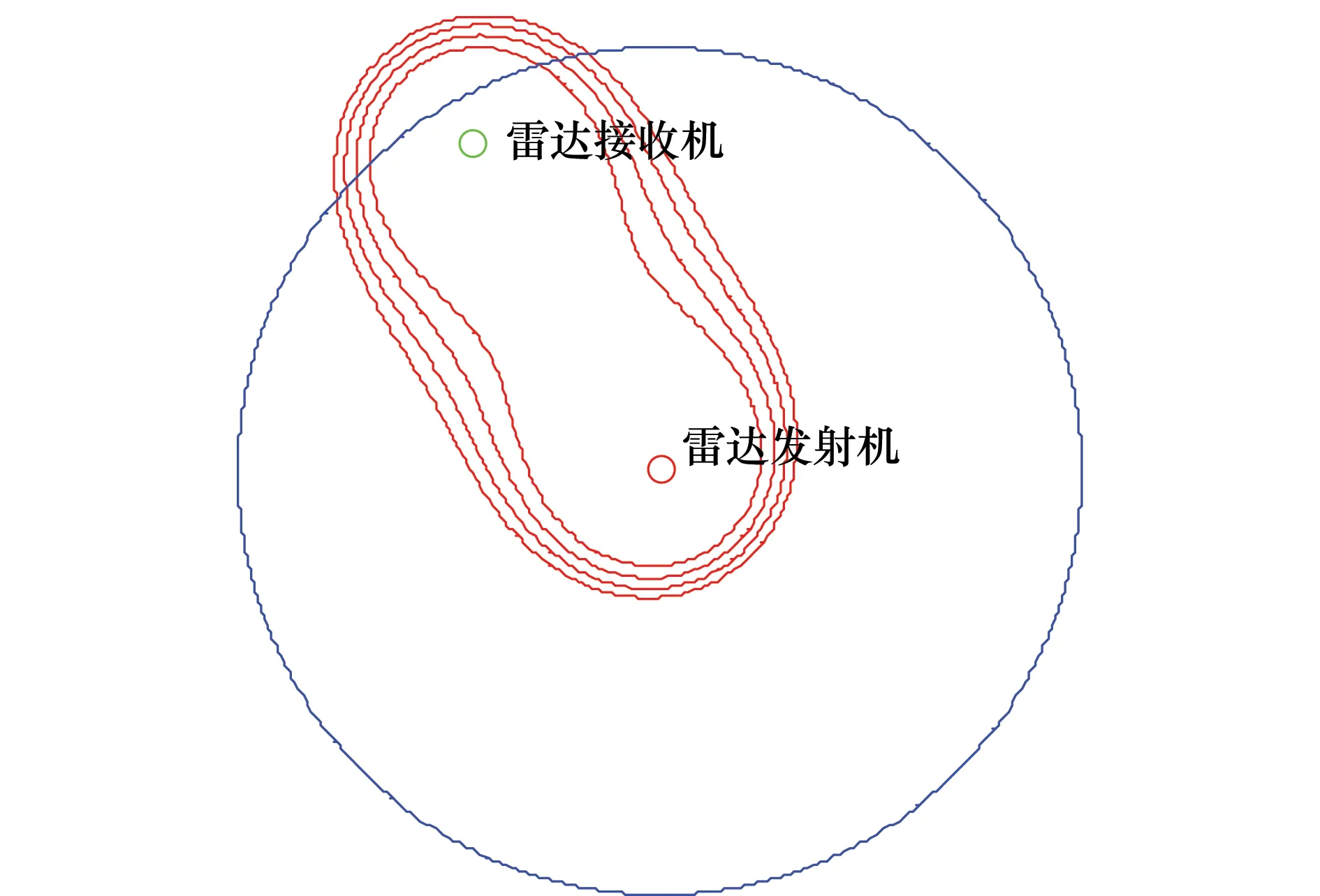
图1 双基雷达(全向)对RCS为定值目标的探测空间Fig.1 Detection space of bistatic radar (omni-directional)to the target with constant RCS
对于隐身目标,σb值在空间上的变化超过±20 dB[14],图2(a)给出了一种隐身飞机模型在水平面内的RCS仿真结果[15],图2(b)为其4阶多项式拟合曲线。可见,RCS在鼻锥方向有显著缩减,对双基雷达探测空间形状有极大影响。
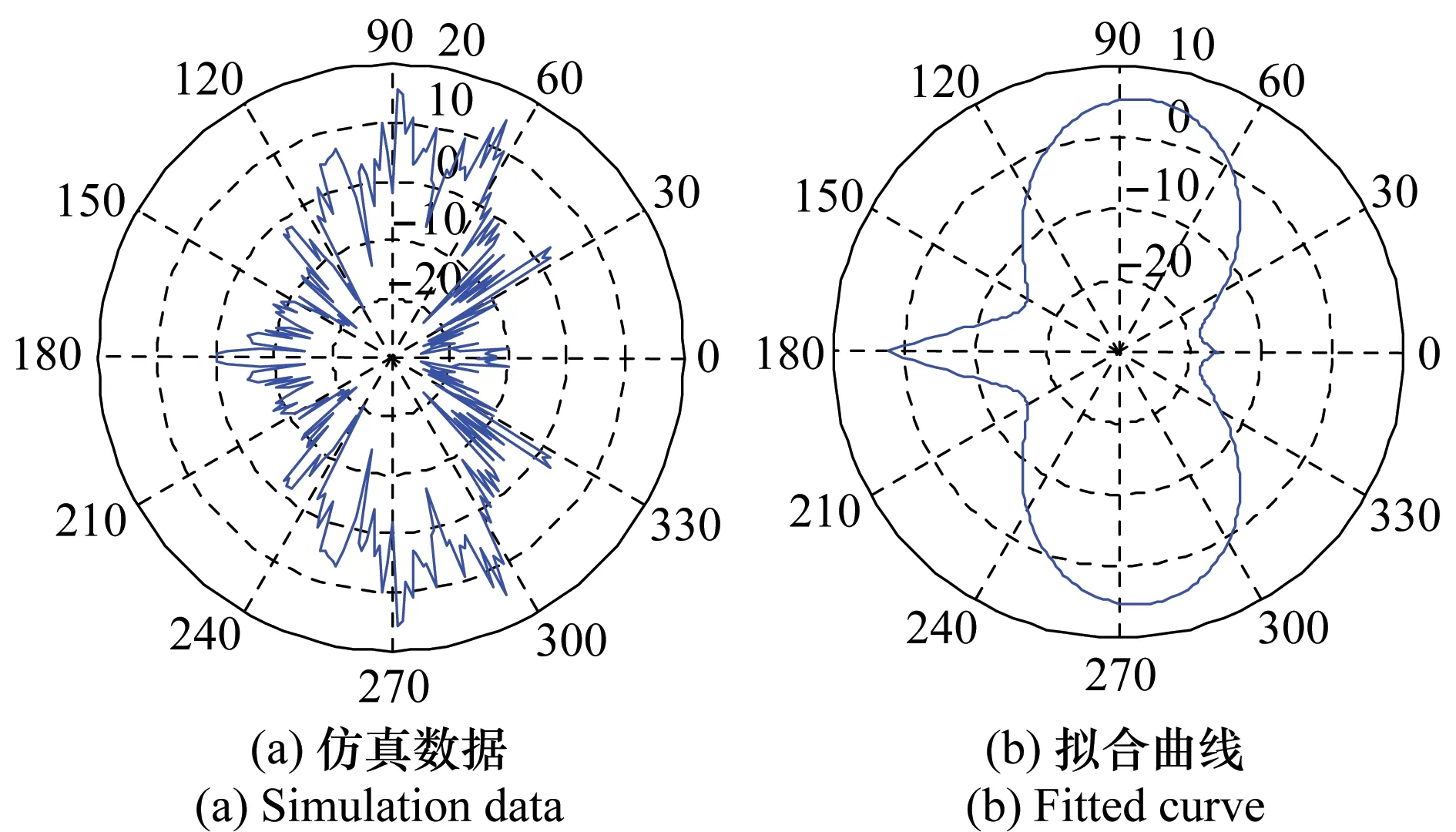
图2 隐身飞机模型在机体水平面内的RCS分布Fig.2 RCS distribution of stealth aircraft model in its horizontal plane
对抗条件下,作为雷达发射节点的隐身飞机自身会暴露于敌方的无源探测系统之下,通常敌隐身飞机会采取能最大限度发挥自身隐身性能的方式,即指向我集群中雷达处于开机状态的飞机方向飞行以达成导弹发射条件。该假设条件下,我方航空集群中处于开机搜索状态雷达的照射波可以近似为从目标鼻锥方向入射,因而目标的双基雷达散射截面积σb的影响因子可以假设为αt=βt=0,仅需要知道目标在0°入射波照射下的双站RCS空间分布,就能够计算出机载双基雷达对隐身目标的探测空间。
1.2Rb的影响
以机载雷达对隐身目标迎头探测距离rT作为距离基准,研究雷达收、发机之间距离变化对双基雷达探测空域的影响。引用文献[15]中给出的隐身目标RCS空间分布,并考虑有人/无人战斗机机载雷达通常存在的最大扫描角限制ν≤νmax,仿真得到的机载双基雷达探测空域分布如图3所示。图中给出了“1发5收”6个节点组成的航空集群在收发分置模式下的机载雷达作用范围,其中,发射节点为兼用收、发模式的全功能雷达,位于坐标原点,5个处于接收状态的节点在发射节点前向[0,π]空间逆时针等距离、等角间距分布,且假设隐身目标在发射节点前向[0,π]空间指向发射节点飞行。
仿真结果显示,航空集群中位于不同方位的接收节点反隐身探测空间的大小和形状显著不同,主要源于隐身目标双站RCS在空间的分布极不均匀和存在雷达最大扫描角所致。越邻近发射节点两翼配置的接收节点探测空域越大,反之越接近发射节点正前方配置的接收节点探测距离越小,最小值位于发射节点正前方向,如图3中3号节点(接收机3),且3号探测空域被2号和4号节点探测空域完全覆盖,因此在集群反隐身构型设计时,发射节点正前方向通常不配置接收节点。此外,受发射节点雷达最大扫描角νmax约束,位于左右正侧方的1号、5号节点损失了部分探测能力,即便如此,图3(a)、图3(b)表明,与其他节点相比,1号、5号节点仍然获得了最大的探测空间。
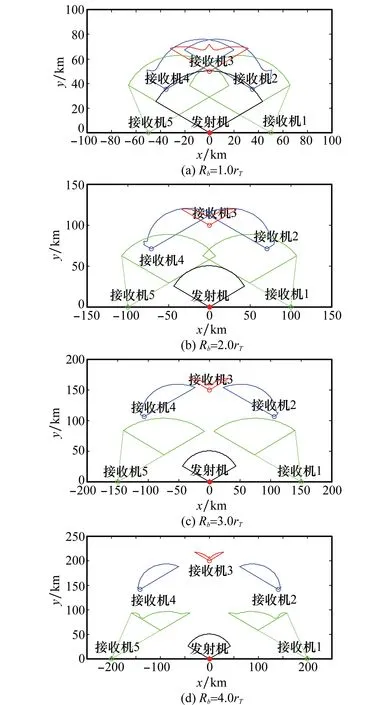
图3 集群机载雷达收发分置模式下对隐身目标的探测空间Fig.3 Detection space of swarm bistatic airborne radars to stealth aircraft
比较图3(a)~图3(d),可以发现:当Rb=1.0rT时,发射节点与接收节点形成的探测空域有较多的重叠,该集群构型适宜于高威胁空域情形;当Rb增大到2.0rT时,各节点形成的探测空域向外充分扩展并紧密衔接,有利于远距离发现隐身目标并防止其从各节点探测空域结合部进入;而当Rb向外进一步扩大到3.0rT时,虽然各节点形成的探测空域明显向外扩展,但空域块之间的结合部已出现明显间隙,各节点之间缺乏交叉保护的能力,这种构型仅可运用于潜在威胁较小的情形;随着Rb继续扩大,各节点探测空域开始萎缩,甚至失去双基雷达探测能力(见图3(d))。
1.3αbist的影响
除了收、发机之间距离外,直接决定双基雷达探测范围的是接收节点相对发射节点的方位角αbist,图4给出了Rb=2.0rT时位于发射节点不同方位8个接收节点的探测空域分布,可见当接收雷达节点配置在发射节点左右两翼[0,(π-νmax)/2]、[(π+νmax)/2,π]时,会在发射节点正面[(π-νmax)/2,(π+νmax)/2]空间形成较大的反隐身探测空域。而最优方位的选择,还需考虑机载导弹的性能和战术运用层面的因素。
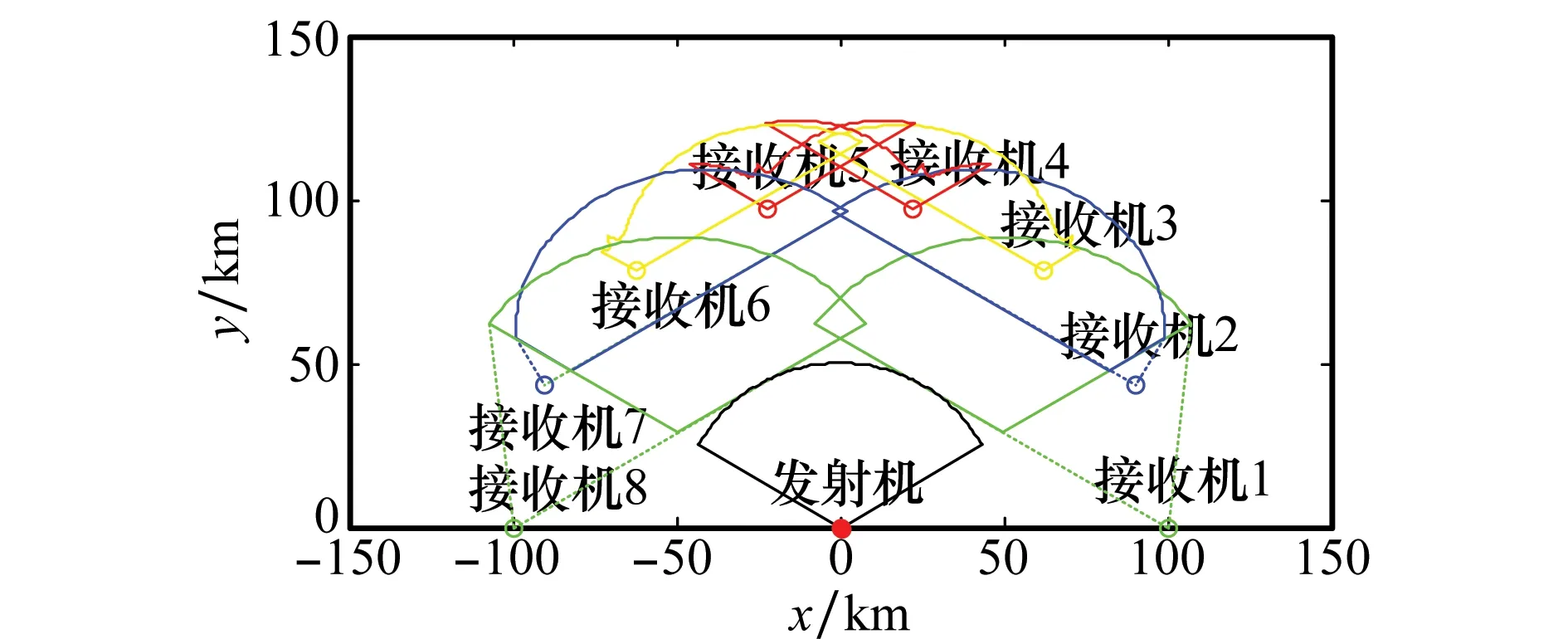
图4 不同方位分布的接收节点探测空域Fig.4 Detection space of bistatic radar receivers in different direction
2 协同反隐身机动策略
如图3、图4所示,基于机载雷达组成的双基雷达系统对隐身目标在前向[0,π]空间内存在两个扇面角大小(π-νmax)/2的探测盲区。对此,航空集群内各战斗机可以通过自身机动,提高空域覆盖度。以图3(b)构型(去除3号节点)为对象,分析收、发节点的机动策略。
2.1作为发射节点的飞机做S形机动
当发射节点(位于坐标原点)在集群基准航向上做S形机动时,在最大偏航角(π-νmax)/2时形成的反隐身探测空域如图5所示,可见,集群两侧的反隐身盲区可被有效覆盖。
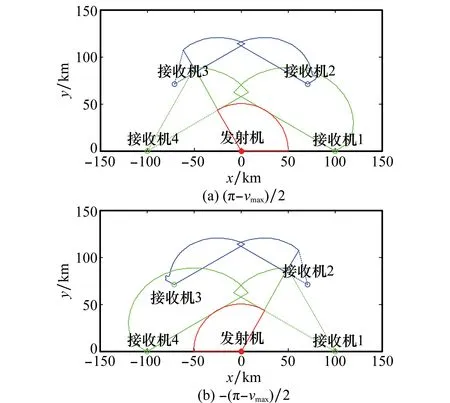
图5 发射节点做S形机动时的集群探测空域Fig.5 Detection space of bistatic airborne radar swarm when transmitter maneuvers along S type path
2.2作为接收节点的飞机做S形机动
当所有接收节点在集群基准航向上同步做S形机动时,在各节点达到最大偏航角(π-νmax)/2时形成的反隐身探测空域如图6所示。
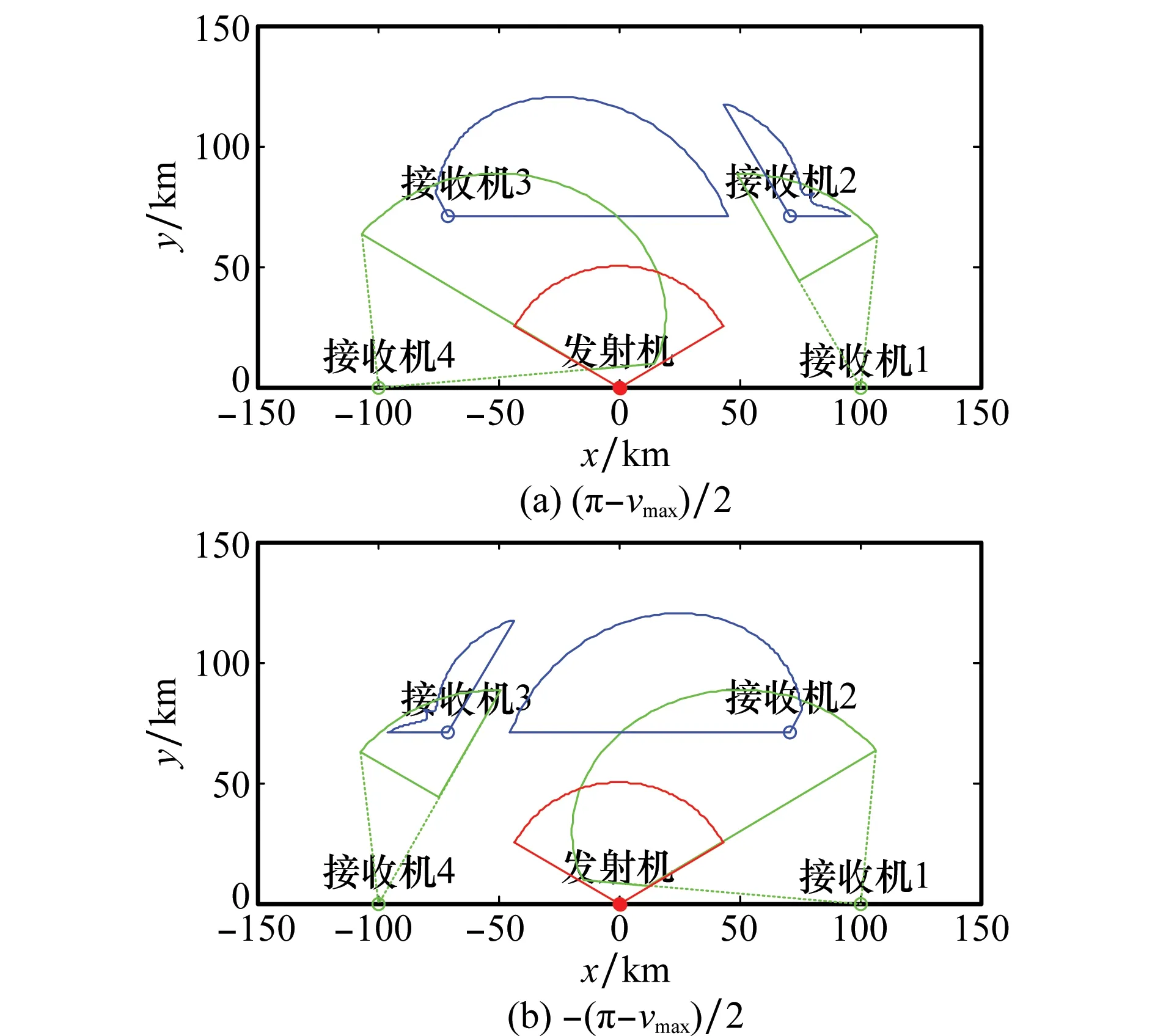
图6 接收节点做S形机动时的集群探测空域Fig.6 Detection space of bistatic airborne radar swarm when all the receivers maneuver along S type path
2.3收、发节点飞机同步做S形机动
当航空集群内所有节点在集群基准航向上同步做S形机动时,在最大偏航角(π-νmax)/2时形成的反隐身探测空域如图7所示。
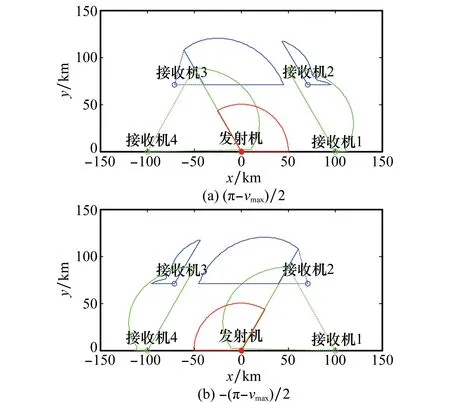
图7 收、发节点飞机同步做S形机动时的集群探测空域Fig.7 Detection space of bistatic airborne radar swarm when the transmitter and receivers maneuver together along the S type path
对比图5~图7可以看出,发射节点不做机动而仅依靠接收节点机动时,探测空域的盲区问题无法得到解决;收、发节点飞机同时做S形机动时的探测空域略小于仅有发射节点机动时的探测空域,且各节点探测空域结合部未形成闭合,增大了漏警风险。因此,作为发射节点的飞机做S形机动,其他作为接收节点的飞机按既定航线飞行,是3种机动反隐身策略中的最佳策略。
3 结 论
本文从隐身目标RCS的空间差异分布入手,研究了利用集群内多节点机载雷达收、发分置所形成的空间探测优势,在保证群内多数节点保持雷达静默的条件下,扩大了单机对隐身目标的探测空域,实现整个集群在前向空间对隐身目标的探测覆盖,主要结论包括:
(1)机载雷达构成的双基雷达系统,处于“只收不发”模式的各接收节点均能够形成一定的反隐身探测能力,接收节点方位越靠近发射节点正侧方,探测空域越大,反之越靠近发射节点正前方,探测空域越小;
(2)收、发节点之间的基线距离为2倍单基雷达对隐身目标的迎头探测距离时,集群形成较好的反隐身空域覆盖能力。基线距离越小,空域的覆盖重叠度越高;基线距离越大,空域覆盖重叠度越低,连续性越差;
(3)为弥补机载雷达扫描角限制所造成的前向探测盲区,提出了3种S形机动策略,其中发射节点机动策略具有更好的补盲效果。
[1] Liang X L,Li H,Sun Q,et al.Development trend of air operations and its strategy[J].Journal of Air force Engineering University (Military Science Edition),2014,14(3):4-7.(梁晓龙,李浩,孙强 等.空中作战发展特征及对策[J].空军工程大学学报(军事科学版),2014,14(3):4-7.)
[2] Liang X L,Sun Q,Yin Z H,et al.Review on large-scale unmanned system swarm intelligence control method[J].Application Research of Computers,2015,32(1):11-14.(梁晓龙,孙强,尹忠海 等.大规模无人系统集群智能控制方法综述[J].计算机应用研究,2015,32(1):11-14.)
[3] Liang X L,Sun Q,Yin Z H.A study of aviation swarm convoy and transportation mission[C]//Proc.of the 4th International Conference on Swarm Intelligence,2013:368-375.
[4] Ledé J C.Collaborative operations in denied environments[EB/OL].[2014-03-20].http://www.darpa.mil/
[5] Zhao P C.Development of stealth and anti-stealth technology of foreign country in 2010[J].Modern Radar,2011,33(4):9-12.(赵培聪.2010年隐身与反隐身技术发展情况[J].现代雷达,2011,33(4):9-12.)
[6] Fu L Q,Yang L S,Tang H,et al.Anti-stealth radar with spread spectrum technology[C]//Proc.of the international conference on advanced materials and computer science,2011:2079-2084.
[7] Chen J J,Wang J T,Li D S,et al.External-illuminator based passive radar network for stealth target detection[J].Journal of Data Acquisition and Processing,2013,28(4):502-507.(陈建军,王江涛,李大圣 等.一种用于隐身目标探测的外辐射源雷达组网系统[J].数据采集与处理,2013,28(4):502-507.)
[8] Gao X G,Wan K F,Li B,et al.Design of networking anti-stealth fire control system based on cloud cooperating technology[J].Systems Engineering and Electronics,2013,35(11):2320-2328.(高晓光,万开方,李波 等.基于云协同的网络集群反隐身火控系统设计[J].系统工程与电子技术,2013,35(11):2320-2328.)
[9] Huang K,Zhang J,Lei J,et al.Research on detecting method of stealth aircraft targets[J].Ship Electronic Engineering,2010,30(5):6-9.(黄坤,张剑,雷静 等.隐身飞机目标探测方法研究[J].舰船电子工程,2010,30(5):6-9.)
[10] Ma Y.Research on multi-sensor embattling and continuous tracking technique applying for anti-stealth and anti-interference[D].Harbin:Harbin Institute of Technology,2008.(马勇.多传感器组网及反隐身/抗干扰接力跟踪技术研究[D].哈尔滨:哈尔滨工业大学,2008.)
[11]Stimson G W.Introduction to airborne radar[M].2nd ed.Raleigh,NC,USA:SciTech Publishing,1998.
[12]Huang P L,Ji J Z,Wu Z.Research on the bistatic RCS characteristic of aircraft[J].Journal of Xidian University,2008,35(1):140-143.(黄沛霖,姬金祖,武哲.飞行器目标的双站散射特性研究[J].西安电子科技大学学报(自然科学版),2008,35(1):140-143.)
[13]Huang P K,Yin H C,Xu X J.Radar targets characteristics[M].Beijing:Publishing House of Electronics Industry,2005.(黄培康,殷红成,许小剑.雷达目标特性[M].北京:电子工业出版社,2005.)
[14] Kopp C.Assessing joint strike fighter defense penetration capabilities[R].Air Power Australia Analysis,2009.
[15] Jiang H,Ang H S.The analysis of aerodynamic and stealth characteristic of F-35 fighter[J].Aircraft Design,2010,30(6):1-10.(姜浩,昂海松.F-35战斗机气动及隐身特性分析[J].飞机设计,2010,30(6):1-10.)
梁晓龙(1981-),通信作者,男,副教授,博士,主要研究方向为航空集群指挥与控制、智能系统、空管自动化。
E-mail:xiaolong.liang@hotmail.com
尹忠海(1964-),男,教授,博士,主要研究方向为集群通讯、网络通讯。
E-mail:zhonghai2005@163.com
孙强(1970-),男,副教授,博士,主要研究方向为集群智能与智能计算。
E-mail:s126email@126.com
Design of aircraft swarm cooperating anti-stealth configuration and maneuver strategy
ZHANG Jia-qiang1,LIANG Xiao-long1,YIN Zhong-hai2,Sun Qiang2
(1.Air Traffic Control and Navigation College,Air Force Engineering University,Xi’an 710051,China; 2.Science College,Air Force Engineering University,Xi’an 710051,China)
To meet the demand of aircraft swarm autonomously anti-stealth,a bistatic airborne radar system concept is proposed,where the airborne radar of any member in the aircraft swarm can be designed as bistatic radar transmitter while the others are designed as the radar receivers.Benefiting from the space diversity design,the swarm members can detect the scattered radar electromagnetic energy from different directions of the stealth target and find out the stealth aircraft.Based on this concept,this paper calculates the anti-stealth airspace range of the bistatic airborne radar system when the radar receivers are placed at different distance and different direction.To eliminate the blind area caused by the radar scanning angle in the swarm forward detecting airspace,three basic types of maneuver strategies of the swarm aircrafts are put forward.The simulation results indicate that,all the radar nodes in aircraft swarm can possess the anti-stealth ability but of various detecting area size and shapes,and different swarm configuration suits different anti-stealth needs in different threat level airspace.The strategy that keeps the radar transmitter node flying in S-type way can fill the swarm detecting gaps.
aircraft swarm; anti-stealth; bistatic airborne radar; space diversity
2015-08-31;
2016-06-03;网络优先出版日期:2016-07-14。
国家自然科学基金(61472442,61472443);陕西省自然科学技术研究发展计划(2013JQ8042)资助课题
V 488.2
ADOI:10.3969/j.issn.1001-506X.2016.11.11
张佳强(1984-),男,讲师,博士,主要研究方向为航空集群理论与技术、智能空中交通管理。
E-mail:jiaqiang-z@163.com
网络优先出版地址:http://www.cnki.net/kcms/detail/11.2422.TN.20160714.1253.006.html