RTCA协议下北斗完好性降效参数算法设计及检验
2016-11-09王源昕曹月玲胡小工黄勇唐成盼
王源昕,曹月玲,胡小工,黄勇,*,唐成盼
1.中国科学院 上海天文台,上海 200030 2.中国科学院大学,北京 100049
RTCA协议下北斗完好性降效参数算法设计及检验
王源昕1,2,曹月玲1,胡小工1,黄勇1,*,唐成盼1
1.中国科学院 上海天文台,上海 200030 2.中国科学院大学,北京 100049
目前我国北斗导航增强系统的完好性参数设计缺少针对差分信息有效性的降效参数设计,不满足航空无线电委员会(RTCA)提出的接口协议,无法同国际其他GNSS星基增强系统相兼容。根据RTCA接口协议,针对我国卫星导航系统的完好性降效参数处理算法进行了研究,利用北斗实测数据分析了完好性降效参数对用户增强服务的影响,验证了算法的有效性。结果表明,正常情况下,北斗导航系统增强服务三维定位精度可达到1.13 m。当用户丢失部分差分改正信息时,定位精度约1.44 m,精度下降约27.4%,利用完好性降效参数对过期差分信息进行降效处理,优化定位权阵,可将定位精度提高至1.17 m,达到正常增强服务水平。
星基增强系统;航空无线电委员会协议;完好性;降效参数;北斗;定位
GNSS卫星导航系统已经被广泛地应用于定位、导航和授时等服务,随着GPS、GLONASS、Galileo以及BDS系统的完善,下一代GNSS卫星导航系统的性能得到极大增强。与此同时,各系统结构的复杂度也大幅度提升,导致系统故障发生概率明显增加,因此,GNSS系统完好性监测问题成为越来越受关注的研究热点[1-4]。
通常情况下,卫星导航系统广域差分增强系统提供的增强信息包括两类,一类是基于轨道和钟差误差改正的差分信息;一类是完好性信息,完好性信息是对差分改正信息的精度进行检核[5]。而北斗区域卫星导航系统(BDS系统)虽在设计初期已经考虑了完好性需求,但完好性参数设计还不够完善,无法满足实际使用需求。随着BDS系统向全球卫星导航系统建设,为了实现与其他GNSS卫星导航系统的星基增强系统相兼容,并满足航空无线电委员会(RTCA)提出的接口协议,BDS系统在完好性参数设计上需要进一步地完善与细化。
BDS现役系统完好性参数与RTCA协议完好性参数设计的主要区别在于缺少降效参数的设计。目前,国内还没有文献对降效参数的处理算法进行研究,本文根据RTCA接口协议中对降效参数的定义,对完好性降效参数相关处理算法进行了研究,利用BDS实测数据,对完好性降效参数算法有效性进行了检验,分析了在用户无法及时获取差分改正信息情况下,应用完好性降效参数对用户增强服务精度和可靠性的改善。
1 降效参数的定义及算法研究
BDS现役系统完好性参数仅包括UDRE、GIVE[6-8],与RTCA协议完好性参数设计[9]的区别见表1。BD现役系统目前缺少降效参数的设计,降效参数是指卫星导航系统增强系统会为用户实时提供差分改正信息,以提高增强服务精度。但在一些异常情况下,随机一个字节的错误或者其他原因,会导致用户丢失这些增强信息,而系统播发针对差分改正信息有效性的降效参数,就可以保证用户在丢失增强信息后的系统完好性。
在RTCA协议中,GNSS导航系统星基增强系统提供的差分改正信息分为快变改正(钟差误差改正)、慢变改正(星历误差改正)以及电离层格网改正信息。本文根据星基增强系统导航电文的慢变改正、快变改正将降效参数区分为慢变改正降效参数和快变改正降效参数,在最新的SBAS L5用户接口文件初稿中[10],降效参数定义如表2、表3所示。
注:√表示有该参数,×表示没有。

表2 慢变改正降效参数定义

表3 快变改正降效参数
根据SBAS L5用户接口文件中的定义,对降效参数的处理算法进行了设计,其中Iltcv0、Iltcv1、Igeo、Iiono均为系统设置,部分主要降效参数的算法如下:
(1)
式中:Fp.clk为快变改正值;Clkunit为钟差快变改正信息量化单位。
(2)

(3)
式中:X1、Y1、Z1为导航电文中两次更新周期慢变改正中轨道改正值速度项的差值,A1为钟漂,Iltc,v1在表2中有定义,为系统设置项。
(5)
式中:IGPdelay为相邻两次电离层延迟增量(取全部格网点的变化均值)。
(6)
(7)
式中:dx、dy、dz、d(clk)如下:
(8)
式中:x、y、z为导航电文中提供的轨道改正值;Iunit为轨道改正值量化单位;Aunit为钟差慢变改正值量化单位。
根据上述降效参数算法设计,利用2015年4月25日北斗实测数据,计算得到慢变降效参数并根据RTCA协议设置截断点,Brrc、Cltc,v0均小于2.046。以1号星为例,慢变降效参数Brrc、Cltc,v0时间序列如图1所示。
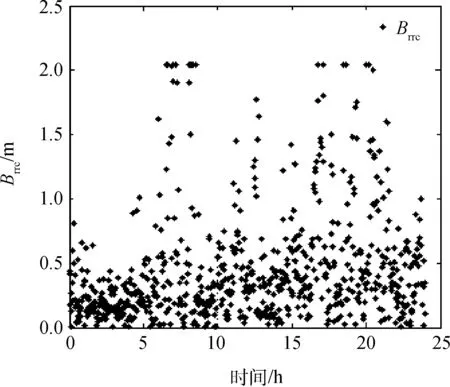

图1 部分降效参数时间序列Fig.1 Result of part of degradation parameters
2 降效参数的使用算法
用户单点定位观测方程可写为:

(9)
式中:ε为伪距观测噪声;G=
式中: (xs,ys,zs)为卫星位置;(xu,yu,zu)为用户位置;dρ为伪距观测值与理论值之差;向量y代表观测量。则观测方程的加权最小二乘解可表示为:
(10)
式中:W为用户定位权阵,为对角阵:
(11)

(12)

(13)
式中:RSSUDRE为用户差分距离误差(UDRE)平方根和因子;σUDRE为UDRE残差;δUDRE为影响用户定位因子;RSSUDRE在第4节有效性检验中设为1;εfc为快变改正降效参数误差;εrrc为距离变化率改正降效参数误差;εltc为慢变改正降效参数误差;εer为NPA服务阶段降效参数误差。
(14)
当快变改正标识IODF≠3,
(15)
当IODF=3,
(16)
当慢变改正速度项时,即Velocity Code=1时,
(17)
当慢变改正值时,即Velocity Code=0时,
(18)
GEO导航数据的慢变改正降效参数误差是:
(19)
(20)
式(14)~(20)中:Ifc,j为最短的快变改正超时间隔;IODFcurrent为最近的快变改正相关的IODF;Δt=(tof-tpre),tof为最新的快变改正的时间,tpre为之前的快变改正的时间;t为当前时间。tltc=GEO卫星中慢变校正信息的第一个比特的传输时间;为小于x的最大整数或者全体整数,为使用GEO导航电文消息的时间[5],其余各参数均已在表2、表3中定义。
3 降效参数有效性检验
为了验证完好性降效参数有效性,分别计算了三种模式下的用户实时定位精度。第一种模式,用户能够正常接收到全部增强改正信息;第二种模式,仿真用户增强信息丢失情况,人为设置30 min内有12 min的差分增强信息缺失,缺失时间内,用户定位不使用差分增强信息;第三种模式, 与第二种模式相同,但在差分增强信息缺失时间内,均采用最后一组收到的差分增强信息,并利用降效参数计算用户定位权阵,对差分增强信息的有效性进行降效处理。
利用2015年4月25日1时12分~1时42分北斗实测数据和北斗增强差分改正信息,计算北斗完好性降效参数,并对上述三种模式的用户定位精度进行了分析验证。图2给出了三种模式下差分改正信息的使用情况,以1号卫星的差分改正为例。其中,图2(a)为模式一情况下差分改正数使用情况,黑色连续的点表示全部时间段正常接收差分信息;图2(b)为模式二情况下差分改正数使用情况,中间10~20 min内缺失差分改正信息,用户定位不采用任何改正数;图2(c)为模式三情况下差分改正数使用情况,中间10~20 min内缺失差分改正信息,该时间段内用户定位时均采用第8 min的差分改正(以圆圈表示)。

图2 三种模式下,增强信息中钟差改正值时间序列Fig.2 Clock correction in three modes
针对上述三种模式,计算中国区域内10个监测站的三维实时定位精度,定位结果RMS统计结果见表4。结果表明在缺失差分改正信息的情况下,定位精度均有下降。而采用增强信息丢失前最后一组差分改正信息,利用降效参数对增强信息的有效性和完好性进行限定,用户的三维实时定位精度有明显提高,与正常情况下增强服务定位精度相当。相对于模式二,利用降效参数信息后,可以将用户三维定位精度平均提高约23%。
以郑州站为例进行具体说明,如图3所示,图3(a)为正常增强服务情况下(模式一),三维实时定位精度为0.93 m;图3(b)为丢失12 min增强信息情况下(模式二),三维实时定位精度为1.15 m;图3(c)为丢失增强信息后基于降效参数加权情况下(模式三),三维实时定位精度为0.96 m。图3中,将定位分三个阶段用2条直线进行分隔,0~10 min及20~30 min,3种定位模式均处于正常增强服务情况,10~20 min模式二和模式三为丢失增强信息时间段。在丢失增强信息时间段,模式二定位精度较模式一明显下降。而模式三在丢失增强信息后,使用过期的增强信息,并根据各卫星计算得到的降效参数,对各卫星分别进行降权处理,相对于完全不使用差分改正信息的情况(模式二),定位精度有明显改善,与正常增强服务情况(模式一)定位精度大致相当,保障了增强服务的连续性和可用性。

表4 各测站3种模式定位精度RMS统计

图3 郑州站定位结果Fig.3 Positioning results of Zhengzhou station in three modes
4 结论
本文依据最新的SBAS L5用户接口文件初稿中降效参数的定义,设计了RTCA协议下的完好性降效参数处理算法。采用北斗实测数据,计算了完好性降效参数,并分析了降效参数对北斗增强服务用户的影响。计算结果表明,设计的完好性降效参数算法适用于北斗增强系统。在差分信息丢失的情况下,采用过期差分信息,并利用降效参数对过期差分信息的有效性进行约束,用户定位精度可与正常增强服务下的定位精度相当,可有效保障北斗系统增强服务的连续性和可用性。该算法可为北斗全球卫星导航系统的星基增强系统的完好性参数设计提供借鉴。
References)
[1]OCHIENG W,SHERIDAN K,SAUER K,et al. An assessment of the RAIM performance of a combined Galilieo/GPS navigation system using the marginally detectable errors(MDE) algorithm[J].GPS Solutions,2002,5(3):42-51.
[2]CAI C S,CAO Y. A combined GPS/GLONASS navigation algorithm for use with limited satellite visibility[J].Journal of Navigation,2009,62(4):671-685.
[3]HEWITSON S,KYU L,WANG J.Localizability analysis for GPS/Galilieo receiver autonomous integrity monitoring[J].Journal of Navigation,2004,57(2):245-259.
[4]JI S Y,CHEN W,DING X L,et al.Potential benefits of GPS/GLONASS/GALILEO integration in an urban canyon-Hong Kong[J].Journal of Navigation,2010,63(4):681-693.
[5]牛飞.GNSS完好性增强理论与方法研究[D].郑州:解放军信息工程大学,2008.
NIU F.Theory and technique on GNSS integrity augment[D].Zhengzhou:PLA Information Engineering University,2008,(in Chinese).
[6]北斗卫星导航系统空间信号接口控制文件(2.0 版)[S].北京:中国卫星导航系统管理办公室,2013.
BeiDou navigation satellite system signal in space interface control document (BDS-SIS-ICD)-2.0[S].Beijing:China Satellite Navigation Office,2013(in Chinese).
[7]北斗卫星导航系统公开服务性能规范[S].北京:中国卫星导航系统管理办公室,2013.
Report on the development of BeiDou navigation satellite system (BDS-OS-PS)-1.0[S]. Beijing:China Satellite Navigation Office,2013(in Chinese).
[8]曹月玲. BeiDou区域导航系统广域差分及完好性监测研究[D].上海:中国科学院上海天文台,2014.
CAO Y L. Studies on the wide-area differential correction and integrity monitoring for the regional satellite navigation system of BeiDou[D].Shanghai:Shanghai Astronomical Observaatory,Chinese Academy of Sciences,2014(in Chinese).
[9]Minimum operational performance standard for global positioning system/wide area augmentation system airborne equipment: RTCA SC-159[S].Washington DC: RTCA, 2006.
[10]Draft IWG SBAS L5 Interface Control Document(SBAS L5 ICD)[OL].(2014-02-06)[2015-12-01].http:∥aaians.org/sites/default/files/eventdocument/.
[11]帅平,曲广吉,向开恒. 现代卫星导航系统技术的研究进展[J].中国空间科学技术, 2004,24(3):45-53.
SHUAI P,QU G J,XIANG K H. Study of the current satellite navigation system techniques[J].Chinese Space Science and Technology, 2004,24(3):45-53 (in Chinese).
[12]刘涛,解永春. 基于GPS相对伪距差分的相对导航方法研究[J].中国空间科学技术, 2007,27(1):1-8.
LIU T,XIE Y C. Study of relative navigation based on relative differential pseudo range of GPS[J]. Chinese Space Science and Technology, 2007,27(1):1-8 (in Chinese).
[13]崔红正,唐歌实,宋柏延,等. 北斗卫星导航系统实时定轨与钟差处理策略[J].中国空间科学技术, 2015,35(5):1-7
CUI H Z,TANG G S,SONG B Y,et al. BDS satellite real time orbitand clock determination and initial results analysis[J]. Chinese Space Science and Technology, 2015,35(5):1-7 (in Chinese).
[14]吴玲,孙永荣,俞晓磊,等. GPS/GLONASS/GALILEO多星座组合导航系统研究[J].中国空间科学技术, 2009,29(3):23-28.
WU L,SUN Y R,YU X L,et al. Researeh on GPS/GLONASS/GALILEO Multi-Constellation integrated navigation system[J]. Chinese Space Science and Technology, 2009,29(3):23-28 (in Chinese).
(编辑:高珍)
The algorithm and validation of BeiDou system(BDS)integrity degradation parameters with RTCA protocol
WANG Yuanxin1,2,CAO Yueling1,HU Xiaogong1,HUANG Yong1,*,TANG Chengpan1
1.Shanghai Astronomical Observatory,Chinese Academy of Sciences,Shanghai 200030,China 2.University of Chinese Academy of Science,Beijing 100049,China
Currently,the design of integrity parameters for the satellite based augmentation system of BDS is lack of degradation parameters for the differential information′s availability,and can′t satisfy the RTCA protocol. So the satellite based augmentation system of BDS is not compatible to the other international satellite based augmentation system of GNSS.The integrity degradation parameters of BDS were designed according to the RTCA protocol,and the effect on the user positioning was analyzed by using the BDS measured data. Based on these,the effectiveness of this algorithm was demonstrated.The results show that, the location precision of the augmentation system for BDS reaches 1.13 m. However, if the user failed to receive some differential correction, the positioning precision reaches 1.44 m, decreases by 27.4% approximately. In this situation, by optimizing position matrix with the integrity parameters to the past differential message, the positioning precision will increase to 1.17 m, so the authorized service will recover.
satellite based augmentation system; Radio Technical Commission for Aeronautics protocol; integrity; degredation; BeiDou navigation system;positioning
10.16708/j.cnki.1000-758X.2016.0054
2015-12-25;
2016-03-25;录用日期:2016-06-30;
时间:2016-09-2116:27:59
http:∥www.cnki.net/kcms/detail/11.1859.V.20160921.1627.011.html
国家自然科学基金(11203059)
王源昕(1990-),女,硕士研究生,yxwang5211@gmail.com,研究方向为广域差分与完好性
黄勇(1977-),男,研究员,yongh@shao.ac.cn,研究方向为空间飞行器精密定轨及其应用
V43
A
http:∥zgkj.cast.cn
引用格式:王源昕,曹月玲,胡小工,等.RTCA协议下北斗完好性降效参数算法设计及检验[J].中国空间科学技术,2016,36(5):25-31.WANGYX,CAOYL,HUXG,etal.ThealgorithmandvalidationofBeiDousystem(BDS)integritydegradationparameterswithRTCAprotocol[J].ChineseSpaceScienceandTechnology, 2016,36(5):25-31(inChinese).
