数字水准辅助下的航外检校场GPS控制联测应用实践
2016-11-04江振治胡海彦
江振治,胡海彦,陈 虹,黄 艳
1.西安测绘研究所,陕西 西安,710054;2.地理信息工程国家重点实验室,陕西 西安,710054
数字水准辅助下的航外检校场GPS控制联测应用实践
江振治1,2,胡海彦1,2,陈虹1,2,黄艳1,2
1.西安测绘研究所,陕西 西安,710054;2.地理信息工程国家重点实验室,陕西 西安,710054
本文应用GPS与数字水准仪相结合测定航外检校场像片控制点,对GPS控制网的精度和水准高程拟合精度分别进行了分析探讨。经内业解析空三加密验证,证明该方法不仅能够满足1∶500比例尺地形图内业加密及成图的需要,而且较传统联测方法可提高工作效率5倍以上。
GPS定位技术;数字水准仪;平面控制网;高程控制网;像控点;精度分析
1 引 言
传统的航外控制点测量方法是:像控点平面坐标采用在高等级控制点上按极坐标测量方式测定,高程则采用图根水准测量或三角高程测量。无疑,传统像控点的测量劳动强度大,且易产生人为误差[1]。随着科技的快速发展,一些先进的测量仪器不断问世,GPS和数字水准仪就是这其中的佼佼者。利用GPS定位技术,可以获取高精度的平面控制网,而采用数字水准仪则可获得高精度的高程控制网[2]。笔者基于这一思想,结合两种测量技术,对某试验区航外区域网像控点平面位置与高程位置进行测定,从而满足大比例尺航空测图的需要。试验结果表明:采用GPS与数字水准仪相结合的方法进行三维控制网的布设,不仅能够满足大比例尺地形图内业加密及成图的需要,而且相对于传统方法可以大大提高三维控制网的整体精度和作业效率[2]。
2 测区概况
试验区的地点位于陕西省某市附近,试验区范围(20km×20km),海拔高度在480~850m左右;其中,航外检校场标志点布设区域为(4.2km×4.2km),布设约441个高精度的标志点用于大比例尺像片控制内业加密测图以及满足航空摄影测量处理精度分析的需要,要求标志点平面精度优于±1.5cm,高程精度优于±1.5cm。试验区地形条件比较复杂,原有高等级控制点较少,与像控点相距较远,且不通视,东南部是山区,北部是汉江,山地、居民地、公路铁路和水系河流分布在测区中间,点位的观测条件很不理想。在测区周边10km处,有国家B级GPS控制点三个、国家1985年高程系二等水准点三个,图1中绿线标示部分为控制点的大概方位距离。整个测区方位略图如图1所示。

图1 测区方位略图
3 GPS联测标志点的作业步骤
3.1标志点布设、选点
航外检校场布设标志点数量为441(21×21)个。点的位置按规则格网布设,采用纵向200m、横向200m方格网状布点。在布设标志点时既要考虑测站本身是否满足像控点的条件,又要考虑测站是否有利于接收卫星信号,因此,测站像控点应选择在视野开阔的地方,而且要避免多路径效应的影响[3]。
3.2GPS控制网布设
GPS网型设计对整个测量方案的可靠性、成果的精度、工作效率等指标影响很大,在实际布网设计时遵循以下几个原则:
(1)GPS网一般应采用独立观测边构成闭合图形,如三角形、多边形或附合线路,以增加检核条件,提高网的可靠性。
(2)GPS网作为测量控制网,其相邻点间基线向量的精度,应分布均匀。
(3)GPS网点应尽量与原有地面控制点相结合。重合点一般不少于2个(不足时应联测),且在网中分布均匀,以可靠地确定GPS网与地面之间的转换参数。
(4)GPS网点应考虑与水准点重合,而非重合点,一般应根据要求以水准测量(或相当精度的测量方法)进行联测,或在网中布设一定密度的水准联测点。
(5)为了便于GPS的测量观测和水准联测,减少多路径影响,GPS网点一般应设在视野开阔和交通便利的地方。
(6)GPS网必须由非同步独立观测边构成若干个闭合环或附和线路。本次试验E级GPS网中每个闭合环或附和线路中的边数应≤10。
GPS网的图形布设通常有点连式、边连式、网连式及边点混合连接、三角锁连接、导线网连接、星形连接等几种基本方式。本次观测主要采用边连式,同时使用10台接收机,组成GPS网,能保证网的几何强度,提高网的可靠指标。
为提高GPS测量精度,应保证测量基线边长基本一致,因此,在实际静态观测过程中,将人员和仪器分成10组,东西方向每组间隔1km,南北方向间隔2km,每一时段观测结束后向同一方向前进,时段之间采用边连接。
3.3外业观测
外业观测首先建立首级控制,由2个B级GPS点发展8个D级GPS点(点位分布如图2所示,图中蓝色框为标志点布设区域),首级控制以C级GPS标准进行观测,对10个点同步观测120分钟,基线解算合格后进行无约束平差。以1381和1378两个B级CGCS2000控制点为约束条件,平差计算GPS1,GPS3,GPS4,0101,0121,2101,1719共8个D级点的CGCS2000三维坐标。
标志点测量采用10台双频GPS接收机,接收机标称精度为5mm+1ppm。按照E级GPS观测方法,历时6天、61个时段,每个时段观测约40分钟,最终完成441个标志点的外业静态观测。观测过程完全满足《GBT18314-2009 全球定位系统(GPS)测量规范》中E级控制网的观测要求。
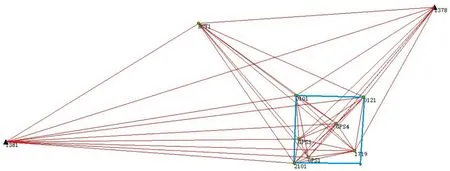
图2 首级GPS控制网
GPS测量所得的大地高H的相对基准是WGS84椭球,我国规定采用正常高高程系统作为我国高程的统一系统,要解求正高H正常,就必须测定似大地水准面差距ξ。通常我们采用GPS水准高程[4]来确定测区范围的似大地水准面,间接求得两球面的差距ξ,再来反求测区范围其他标志点的高程。本试验通过对测区比较均匀分布的15个标志点进行了三等水准测量,得出15个点的高程,作为整个测区的高程基础控制数据,对全区进行高程拟合,最终拟合出测区所有标志点的高程值。水准测量仪器为徕卡电子水准仪配合铟钢条码尺,采用往返观测的方法,奇数站按“后前前后”,偶数站按“前后后前”的观测顺序在相邻站上交替进行。为保证视距不超过50m,前后视距差不超过1m,视距差累积不超过3m,在设站前需要用皮尺量距来确定转点点位和仪器的位置,并且要在各测站间调整视距差累积差。在转点处要安置尺垫,观测完一站后,前视方向变为后视方向,后视方向变为前视方向继续观测,直至观测完毕。水准联测点位分布如图3所示。

图3 测区水准点位分布图
3.4精度分析
GPS网基线向量解算与检核GPS数据采集后,采用天宝TBC3.5软件进行基线向量解算。基线向量的检核包括同步环检测和异步环检测, 其限差按《全球定位系统(GPS)测量规范》执行。基线解算中误差最大值为16.27mm,最小值为0.21mm,平均值4.03mm,基线解算中误差都优于20mm的规范要求。基线相对精度统计见表1。
表1基线相对精度统计

误差区间1/1万-1/4万1/4万-1/6万<1/6万百分比2.0%10.83%87.17%
从上面精度统计可以看出,GPS网基线解算精度较高,GPS在小范围短基线测量中的基线相对精度要比在大范围长基线测量中的基线相对精度低,但一般也都能满足1/1万的相对误差精度要求。这表明GPS也可以胜任小范围布网工作[2]。
同步环各坐标分量闭合差及环线全长闭合差,应满足:
(1)

(2)

=14.9mm
(3)
式中,σ为弦长标准差,单位为mm;WX、WY、WZ、W环分别为同步环坐标分量及环线全长闭合差,单位为mm;a为固定误差,单位为mm;b为比例误差系数;d为相邻点间平均距离,单位为km。
根据软件解算输出的基线向量成果,对各时段同步环进行检查,同步环闭合差统计见表2。
表2GPS同步环精度统计
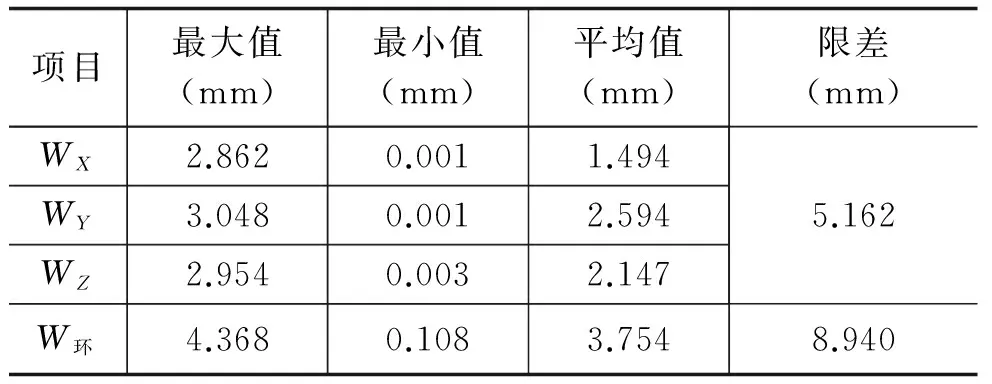
项目最大值(mm)最小值(mm)平均值(mm)限差(mm)WX2.8620.0011.494WY3.0480.0012.594WZ2.9540.0032.1475.162W环4.3680.1083.7548.940
从同步环精度统计可以看出,仪器精度正常,软件解算正确。
异步环各坐标分量闭合差及环线全长闭合差,应满足:
(4)
(5)
式中,σ为弦长标准差(σ同公式3),单位为mm;WX、WY、WZ、WS分别为同步环坐标分量及环线全长闭合差,单位为mm。
全网共检查异步环239个,闭合差统计见表3。
表3 GPS异步环精度统计

项目最大值(mm)最小值(mm)平均值(mm)限差(mm)WX8.9270.0062.446WY17.9620.0043.895WZ17.7530.0262.93777.423WS21.0211.2976.297134.100
3.5网平差计算
3.5.1三维无约束平差
为全面检查GPS网内部符合精度,进一步探测可能存在的粗差,对基线向量在WGS84坐标系中进行三维无约束平差(如图4所示),并形成高程拟合所需的数据[5]。求得各基线向量在WGS84坐标系内的每条基线分量改正值并予以检查,及时发现含有较大改正值的基线, 根据具体情况采用剔除或补测的方法进行处理。本网共计1869条基线全部通过检验, 无约束平差中,基线向量的改正数绝对值应满足以下要求:X方向中误差VΔX≤3σ,Y方向中误差VΔY≤3σ,Z方向中误差VΔZ≤3σ。实际计算结果VΔX最大值为11mm,VΔY最大值为24mm,VΔZ最大值为16mm,均小于限差3σ=44.79mm(σ同公式3)。表明GPS静态网在WGS84坐标系内部符合精度良好, 完全可以直接利用数据进行二维平差。
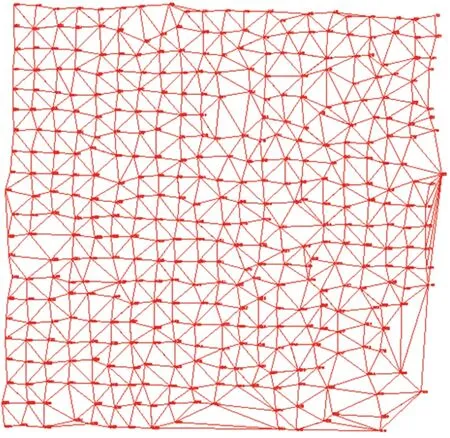
图4 GPS控制网联测图
3.5.2标志点二维约束平差
根据基线解算成果,以首级控制计算的0101,0121,2101,1719四个D级点为起算点,对全网进行二维约束平差。平差中GPS网能较好地符合于基准点上,GPS控制网的二维约束平差后点位精度统计见表4。
表4平差后点位精度统计

点位中误差(m)mXmYmXY±0.007±0.009±0.011
二维平差后标志点平面中误差为±0.011m,满足了航外检校场±0.15m设计精度指标要求,同时也满足了1∶500比例尺像控点平面精度(±0.05m)的需要。
3.5.3高程控制网的精度统计
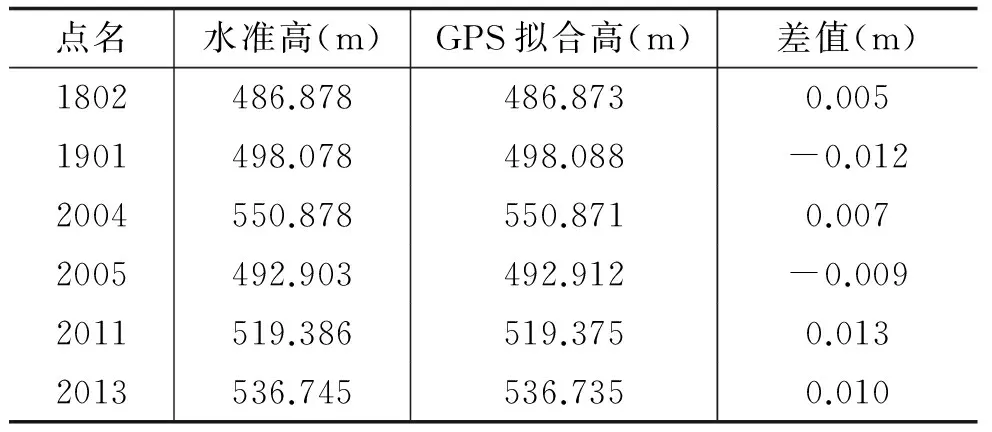
利用在测区周围10km处国家二等水准成果和15个经三等水准联测的测区标志点的高程成果,采用带有附加地形改正的曲面拟合方法,对全网进行高程拟合,其高程拟合平差的内符合精度中误差为±0.012m,小于四等高程拟合0.02m的精度要求。另外对15个经三等水准联测的标志点拟合高程中误差进行了统计,相对于三等水准高程中误差[6]为±0.009m,具体差值见表5。
表5拟合高程和几何水准比较表

点名水准高(m)GPS拟合高(m)差值(m)0109480.437480.4270.0110302481.065481.0530.0140317483.248483.251-0.0030319481.431481.4230.0080517483.249483.255-0.0061102485.810485.8000.0101112483.856483.8470.0091113489.046489.051-0.0051302493.779493.7730.006
续表
从上表可以看出,本次测量成果均达到了四等几何水准的要求。这表明高程拟合所求得的各像控点高程可靠,精度良好。高程精度满足了航外检校场±0.15m设计精度指标要求,同时也满足了1∶500比例尺像控点高程精度(±0.05m)的需要。
4 内业空三加密
在检校场区域采用面阵CCD航摄相机进行光束法空中三角测量作业处理,相机及摄影参数见表6,航迹规划如图5所示。
表6面阵相机及摄影参数

项目资料参数相机焦距(mm)44.87像幅(K)6×8像元大小(μm)6相对航高(m)1500航向重叠35%旁向重叠65%GSD(m)0.2航线数8航片数64加密点数890地面总标志点数41

图5 航迹规划
作为像控点的应用以及验证测量精度,根据外业布设的平高控制点的GPS三维成果以及测区的其它资料,选取部分标志点控制数据作为控制点及检查点,按照规范要求对成图所需的控制点进行内业空三加密,区域控制点中误差、检查点中误差均符合《1∶500,1∶1000,1∶2000地形图航空摄影测量内业规范》(GB 7930-87)的要求,从41个均匀分布在测区的标志点中选取了6个作为控制点,其他35个作为检查点。具体精度统计见表7。
表7空三加密精度统计
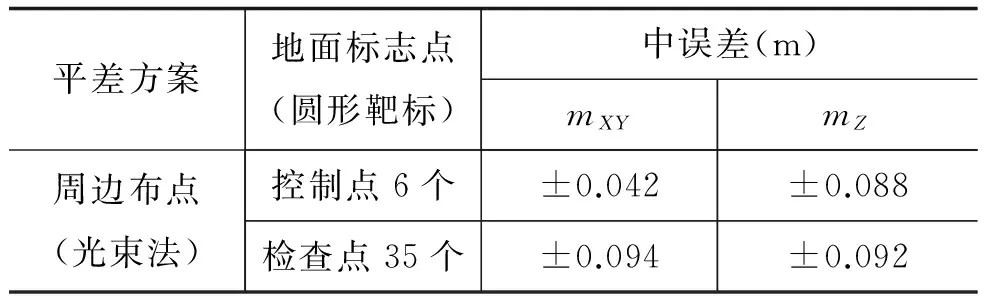
平差方案地面标志点(圆形靶标)中误差(m)mXYmZ周边布点(光束法)控制点6个±0.042±0.088检查点35个±0.094±0.092
从精度统计结果可以看出,空三加密后检查点的点位精度达到了±0.131m,可以满足1∶500比例尺地形图加密点精度(±0.18m)的要求。
5 结 论
通过应用GPS与数字水准仪相结合测定像控点的实践,并利用实际航摄资料评价了像控点的测量精度,空三试验结果表明,像控点的平面及高程精度都满足了1∶500比例尺加密成图精度要求,可得出如下结论。
(1)用常规控制测量的方法(如:交会法、导线测量、引点法等), 需要考虑测点间的通视, 往往需要做大量的过渡点, 且经常受天气条件的影响, 效率较低,此次飞行试验区地形较复杂,测区没有高等级的控制点,要从几十公里外引点,若按相同的人员工作至少需要一个月才能完成试验场布设。而采用GPS技术联测像控点, 6天完成试验区的布设,比传统方法可提高工效5倍以上。
(2)选点时, 点位要便于信号的接收和不受干扰。
(3)在范围不大的平原或丘陵地区,在水准起算点足够且分布均匀的情况下,利用高程拟合计算的成果能够达到Ⅳ等水准测量精度要求,完全可以满足大比例尺测图对高程的精度要求。
(4)用GPS技术直接测定像控点的坐标, 其点位精度高且均匀一致, 成果可靠。
(5)用GPS技术联测的像控点, 无论从精度和时间,还是从经济角度来看, 都要比常规测量手段优越,值得在大中小比例尺航测成图中大力推广应用。
[1]陈乃权,刘学斌,喻华. GPS 用于大比例尺航外像控点测量的几个主要问题[J].城市勘测,2001,(2)22-23.
[2]李井春,夏立福. GPS与数字水准仪相结合进行三维控制网的布设[J].海洋测绘,2008(2):59-60.
[3]倚言寿. 定位技术应用于航外像片控制联测[J].测绘技术装备,2001(4):15-16.
[4]沈学标.GPS水准高程拟合精度的分析[J].测绘通报,1998(7):21-22.
[5]马天驰,李秀海,郭英起.用GPS定位技术确定像控点的实践[J].测绘工程,1999(1):57-58.
[6]缑晓阳. GPS拟合高程的精度分析及应用[J].科协论坛,2009(8):84-86.
Application of GPS Conjunction of Control Survey for Aerial Photogrammetric Calibration Field with Digital Leveling Equipment
Jiang Zhenzhi1,2, Hu Haiyan1,2, Chen Hong1,2, Huang Yan1,2
1.Xi’an Research Institute of Surveying and Mapping, Xi’an 710054,China 2.State Key Laboratory of Geo-information Engineering, Xi’an 710054,China
In this paper, the coordinates of image control points for aerial photogrammetric calibration field are measured with static GPS and digital leveling equipment. The precision of GPS control network and the elevation fitting precision of digital leveling equipment are analyzed and studied. It is verified by encrypted aerial triangulation that this method can satisfy the requirements of the office encrypted work of 1∶500 scale topographic mapping and increase work efficiency by at least five times compared with the traditional surveying method.
GPS positioning technology; digital leveling equipment; horizontal control network; elevation control network; image control point; accuracy analysis
2016-02-02。
江振治(1966—),男,副研究员,主要从事摄影测量与遥感方面的研究。
P231
A