用卡尔曼滤波方法进行氢钟钟差预报的方法与结果
2016-11-04程梦飞
程梦飞,李 博,齐 昕
北京卫星导航中心,北京,100094
用卡尔曼滤波方法进行氢钟钟差预报的方法与结果
程梦飞,李博,齐昕
北京卫星导航中心,北京,100094
钟差预报是实现时间同步的重要基础,本文以原子钟时间模型为理论基础,研究主动型氢原子钟与协调世界时UTC(k)的钟差预报方案。线性最小二乘模型与卡尔曼滤波模型均可进行氢钟参数估计和钟差预报。线性最小二乘模型只能估计钟的确定性参数,不能及时适应氢钟信号的变化;卡尔曼滤波模型不仅可以滤除测量噪声等部分噪声,减小频差和频漂波动,提高信号的短期稳定度,及时适应氢钟信号的变化,准确预报时差值、频差值和频率漂移值,而且有助于提高时间溯源精度和稳定度。
原子钟时间模型;钟差预报;线性最小二乘模型;卡尔曼滤波模型
1 引 言
原子钟是时间频率系统的基础,主动型氢原子钟因其优良的短、中长期稳定度和高的相位噪声指标在卫星导航等领域应用广泛。以原子钟时间模型为理论基础,将氢钟输出信号视为时标A,通过调整其频率向协调世界时UTC(k)进行时间同步,钟差数据预报结果对溯源精度有着重要的影响。
溯源过程中可以采用线性最小二乘拟合模型进行钟差结果预报,该钟差数学模型中只包含钟差的确定性部分,无法量化随机性部分(噪声部分)对钟差的影响。然而在高精度溯源中,误差项对于钟差数据预报结果有显著影响,需要改进钟差预报模型,在模型中加入对原子钟时间模型随机性部分的计算。卡尔曼滤波模型根据时差值、频率偏差、频率漂移和误差项进行系统状态值估计,每得到一个新的测量值,就可以对系统状态估计值更新一次,实现钟差的实时预报。因此,采用卡尔曼滤波模型替代线性最小二乘拟合模型进行钟差数据预报,有助于提高溯源精度。
2 原子钟时间模型
原子钟模型可以准确描述主动型原子钟在运行过程中输出信号与协调世界时UTC(k)信号时差的变化规律,体现了钟速与钟漂在运行过程中对时差的影响,为频率调整量的计算提供了依据。原子钟时间模型分为确定性部分和随机性部分(噪声部分)[1]。其表达式为:
(1)

氢原子钟相对于基准钟具有频率偏差和较为明显的一次频率漂移,二次及以上频率漂移很小,可以忽略不计。因此,用原子钟二次时间模型描述氢原子钟:
(2)
原子钟二次时间模型的随机性部分由测量噪声和相位噪声组成,如下式所示:
εx(t)=Δε1(t)+Δε2(t)
(3)
其中,Δε2(t)为测量白噪声,均值为零,方差为测量精度的平方;Δε1(t)为相位噪声,根据经典相位噪声理论,相位噪声Δε1(t)由五种独立噪声(相位白噪声n2、相位闪烁噪声n1、频率白噪声n0、频率闪烁噪声n-1和频率随机游走噪声n-2)线性叠加构成:
Δε1(t)=n2+n1+n0+n-1+n-2
(4)
3 线性最小二乘拟合模型

(5)
(6)
采用线性最小二乘拟合模型进行钟差结果预报,该钟差数学模型中只包含钟差的确定性部分,无法量化随机性部分对钟差的影响。在高精度溯源中,误差项对于钟差数据预报结果有显著影响,需要在模型中加入对原子钟时间模型随机性部分的计算。
4 卡尔曼滤波模型
4.1基本原理
卡尔曼滤波是一种高效率的递归滤波器(自回归滤波器),能够从一系列的不完全及包含噪声的测量中,估计动态系统的状态。卡尔曼滤波要建立状态方程和观测方程,其实现过程包括两个阶段:预测与校正。在预测阶段,滤波器使用上一状态的估计,做出对当前状态的估计;在校正阶段,滤波器利用测试得到的观测值,对状态估计值进行校正,获得一个更精确的新估计值,是一个反馈过程。卡尔曼滤波的流程如图1所示。

图1 卡尔曼滤波流程图
4.2数学模型
原子钟有三个状态变量分别为:时差x(t)、频差y(t)、频率漂移率D(t),而钟差为X(t),原子钟的基本模型[3,4]可以由下式给出:
(7)
离散化的原子钟状态变量矩阵为X(k),包括时差、频差、频率漂移率,建立原子钟的状态方程为:
X[k+1]=Φ·X[k]+η[k]
(8)
其中,Φ为转移矩阵,η[k]为驱动噪声。设η[k]的协方差矩阵为Q,则
(9)
原子钟的观测方程为:
Z[k]=H·X[k]+V
(10)

根据原子钟的时间模型,分析原子钟的状态变量、状态方程、观测方程,建立卡尔曼滤波递推方程,进行原子钟的钟差预报[3,4],公式如下:

(11)
最小预测均方误差
(12)

(13)
状态修正
(14)
Pk,k=(I-Kk×Hk)×Pk,k-1最小均方误差
(15)
4.3噪声系数的计算
由卡尔曼滤波模型的五个方程(式(11)~(15))可知,进行卡尔曼滤波的关键是得出矩阵Q和R里的参数。测量噪声方差可以由测量精度计算得到,而驱动噪声方差矩阵里的原子钟的噪声方差可以由Allan方差反演法得到。
计算原子钟钟差的Allan方差[1]:
(16)
其中,N是时差xi的个数;τ为平滑时间,平滑时间为测量时间的整数倍。
由原子钟噪声理论[3,4],原子钟五种噪声对Allan方差的贡献如下式所示:
(17)

(18)
(19)
(20)
5 钟差预报
将上海天文台生产的SOHM-4型氢原子钟输出的信号视为某时标信号(时标A),选取另一时标为协调世界时UTC(k)(时标B),调整时标A,将其向时标B同步,以2016年1月8日至1月19日的钟差数据为例,估计原子钟二次时间模型的参数并进行钟差预报。
5.1线性最小二乘拟合模型



图2 1月8日至1月17日时差图
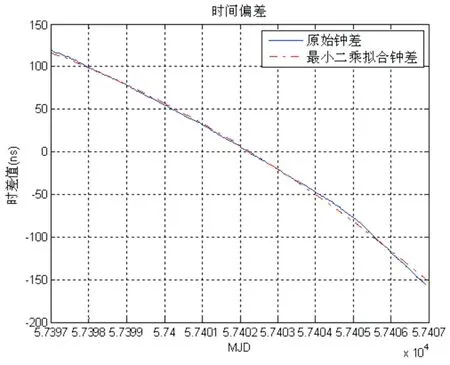
图3 1月10日至1月19日时差图
由图2、图3以及频率调整控制量的对比可知:用最小二乘法拟合10天的钟差数据进行钟差预报,在1月18日前后的预报结果之差为ΔU=0.58×10-13,与实际的频差变化量-1.4×10-13不一致。因此,选取一段时间的时差数据,利用最小二乘拟合法进行钟差预报,如果氢钟发生频率变化,最小二乘拟合法将无法准确预报频率调整控制量。
5.2卡尔曼滤波模型


图4 卡尔曼滤波前后的时间偏差值
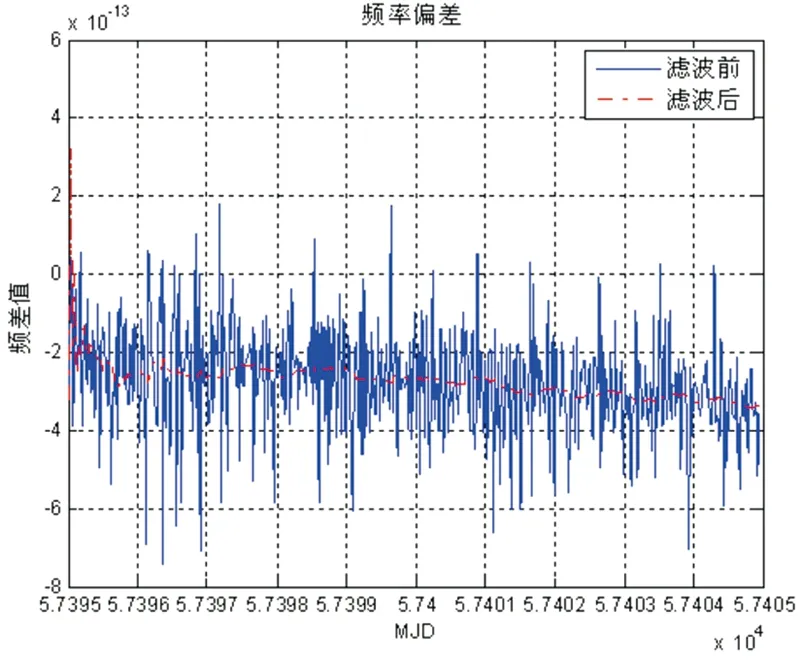
图5 卡尔曼滤波前后的频率偏差值

图6 卡尔曼滤波前后的频率漂移值

图7 卡尔曼滤波前后的Allan方差曲线
选取2016年1月10日至1月19日共计10天的时差数据,其中1月18日氢钟频差变化了约-1.4×10-13,如图8~11所示,蓝色实线表示卡尔曼滤波前的时差值、频差值、频率漂移值和Allan方差,红色虚线表示卡尔曼滤波后的时差值、频差值、频率漂移值和Allan方差。将预报频差fE作为频率调整控制量,U=-fE=4.80×10-13。

图8 卡尔曼滤波前后的时间偏差值

图9 卡尔曼滤波前后的频率偏差值

图10 卡尔曼滤波前后的频率漂移值

图11 卡尔曼滤波前后的Allan方差曲线
由图4~7、图8~11以及频率调整控制量的对比可知:(1)卡尔曼滤波器可以滤除部分噪声,滤波后的频差和频漂波动明显减小,短期稳定度得到提高。(2)卡尔曼滤波的适应性很强,计算得到的钟差、频差、频漂等参数能及时反映氢钟的实际性能,如图9所示,氢钟频差在1月18日变化了-1.4×10-13,卡尔曼滤波法在1月18日前后的预报结果之差为ΔU=1.31×10-13,与实际的频差变化量基本一致。在实际应用中,用卡尔曼滤波拟合钟差数据进行钟差预报,如果氢钟发生频率变化,仍将准确预报频率调整控制量。
6 结 论
以原子钟信号模型为理论基础,进行钟差预报,再进行频率调整控制,从而实现两个时标之间的溯源。线性最小二乘拟合模型和卡尔曼滤波模型均可进行氢钟参数估计和钟差预报。线性最小二乘拟合模型只能估计钟的确定性参数:初始频差和一次频率漂移,拟合结果反映的是整段拟合数据的特性,当频差出现变化时,若不能及时剔除频差变化前的数据,无法准确预报钟差。卡尔曼滤波模型不仅可以及时适应氢钟信号的变化,准确预报时差值、频差值、频率漂移值,还可以滤除测量噪声等部分噪声,减小频差和频漂的波动,提高信号的短期稳定度。卡尔曼滤波模型有助于提高时间溯源精度和稳定度。
[1]董绍武.守时中的若干重要技术问题研究[D].西安:中国科学院国家授时中心,2007.[2]朱陵凤,李超,刘利等.基于国产氢原子钟的钟差预报方法研究[J].大地测量与地球动力学,2009(1):148-151.[3]伍贻威.卫星导航系统时间尺度的研究与应用[D].长沙:国防科学技术大学,2011.
[4]朱祥维,肖华,雍少为等.卫星钟差预报的Kalman算法及其性能分析[J].宇航学报,2008,29(3):966-970.
[5]车站武,史丰丰.主钟溯源策略的研究与实现[J].测绘科学与工程,2014,34(2):70-73.
Hydrogen Clock Bias Prediction Method and Its Result Based on Kalman Filter Model
Cheng Mengfei, Li Bo, Qi Xin
Beijing Satellite Navigation Center, Beijing 100094, China
Clock bias prediction is the foundation for time synchronization. Based on the atomic clock time model, the clock bias prediction schemes of Hydrogen Clock SOHM-4 and UTC(k) are studied in this paper. Both linear least square model and Kalman filter model can estimate Hydrogen clock's parameters and predict clock bias. However, the former model can only estimate the definite parameters of clock, but not adjust to the change of clock signal in time. The latter one can filter some noises like measuring noise, reduce fluctuations of frequency difference and drift, and improve the short-term stability of clock signals. In addition, it can adjust to the change of clock signal in time, and accurately predict values of clock bias, frequency difference and frequency drift. It comes to the conclusion that Kalman filter model is helpful in improving the accuracy and stability of time tracing.
atomic clock time model; clock bias prediction; linear least square model; Kalman filter model
2016-01-25。
程梦飞(1987—),女,硕士研究生,主要从事卫星导航系统时间频率方面的研究。
P228
A