GNSS双天线快速定向系统研究
2016-11-04李夫鹏詹银虎
李夫鹏,张 超,詹银虎
信息工程大学,河南 郑州,450001
GNSS双天线快速定向系统研究
李夫鹏,张超,詹银虎
信息工程大学,河南 郑州,450001
针对目前GNSS定向仪初始化时间长、定向精度低的问题,推导了GNSS双天线定向的观测方程,提出了一种快速解算整周模糊度的方法。采用Trimble公司生产的BD982 OEM板研制出一套GNSS双天线快速定向仪系统,根据用户需求编写了一套功能齐全的定向系统软件。结果表明,该定向仪系统能够快速初始化,同传统GNSS定向仪相比,其初始化时间明显缩短,定向精度明显提高。
GNSS;双天线;整周模糊度;定向
1 引 言
目前,常用的定向方法有几何定向法、陀螺仪定向法、磁定向法、天文定向法和GNSS双天线定向法。这五种定向方法中几何定向方法必须具备一个已知方位,是一种相对的定向模式,另外四种则不需要。按照定向原理,天文定向和陀螺定向方法的定向基准是地理北方向,几何定向和双天线定向基准为坐标北,而磁定向是磁北方向。就定向精度而言,天文定向精度最高,其观测北极星精度为0.5~1″,观测太阳的精度为10~30″;陀螺方位角一次测定中误差为15~20″;几何定向法的定向精度跟起始方位以及测量仪器有关;GNSS双天线定向精度跟基线长度有关,一般情况下,对于2m基线定向精度能够达到0.09°,10m、100m基线的定向精度能够分别达到0.05°、0.01°;磁定向精度偏低,目前还无法应用于测绘领域,常用于航海、地质、探险、旅游等民用领域[1-3]。
卫星定向的思想是Spinney在1976年提出的,该方法已逐渐替代了大量传统的定向工作,在工程测量以及航天器发射等场合得到了良好的应用,其中以采用双天线的卫星定向方法最为成熟。GNSS双天线定向技术由于其点位选择限制少、作业时间短、不受天气条件影响、费用低等优点,已被广泛地应用于工程测量和测地保障[4-5]。目前常用的GNSS双天线定向仪主要由两个GNSS接收机天线、两个GNSS接收机组成,每个接收机分别解算天线位置,得到基线两端点的坐标,再算出两端点的基线解,最后得到两端点的坐标方位角[5-8]。
本文尝试采用Trimble公司生产的BD982 OEM板研制一套GNSS双天线短基线快速定向仪。该定向仪由两个GNSS天线和一个接收机组成,接收机能够同时接收两个天线的GNSS观测数据,可以在接收机内部直接通过差分的方式消除大部分相关性误差,快速地确定整周模糊度,降低初始化所需的时间,达到快速定向的目的。受限于BD982 OEM板的电压以及数据线的阻抗,该定向仪目前只能进行100m以内的短基线定向,还无法进行长基线定向。
2 GNSS双天线定向原理
GNSS双天线定向采用了移动RTK技术,两个天线都在未知点上,由于两个天线距离不远,根据空间相关性可以抵消掉电离层、对流层等误差,得到较高定向精度。因伪距测量码元长、精度低,故常利用载波相位进行测量。
2.1GNSS双天线定向观测方程推导
假设GNSS双天线p、q的载波相位观测值为φp、φq,在卫星星历给出的信号发射时刻卫星i的坐标为(Xi、Yi、Zi),接收机p、q的坐标分别为(Xp、Yp、Zp)和(Xq、Yq、Zq),那么双天线对卫星i载波相位观测方程分别是:
(1)
(2)
式中,c为光速;VtR是接收机钟差;Vts是卫星钟差;λ为载波的波长;N为整周模糊度;Vion是电离层误差;Vtrop是对流层误差。
那么上面两个观测方程可以写成:
(3)
(4)
将两式相减可得:
(5)
(6)
由于本文提出的GNSS双天线定向模式为短基线定向,根据空间相关性,双天线的电离层、对流层等误差基本相同,Δ(Vion)pq、Δ(Vtrop)pq的值可以视为零,因此,双天线对卫星i的观测方程可以进一步简化为:
(7)
假如双天线p、q同时对卫星j进行了载波相位观测,那么仿照卫星i的观测方程可以写出卫星j的观测方程:
(8)
将卫星i、j的载波相位观测方程相减后可得:
(9)

上式可以简化为:
(10)
2.2双天线定向中整周模糊度快速解算
观测方程(10)中只有基线向量以及整周模糊度两类未知参数,若要求解基线向量,首先要确定整周模糊度。解算整周模糊度的方法很多,典型的有在模糊度组合基础上的搜索方法和在三维位置基础上的搜索方法,这些搜索方法一般都是三维的搜索过程,计算量较大,工作十分繁琐[9,10]。本系统进行快速定向时,双天线的单点解可以通过BD982 GNSS接收机分别快速求出。若对主天线和从天线的单点解进行差分,则可求出基线的初始向量解。由于基线距离较短,根据误差的空间相关性,该初始向量解的大部分误差在差分的过程中被充分消除,因此该向量解具有一定的精度。已知该基线向量,将其带入法方程求解模糊度参数,观测方程的状态会大大改善,整周模糊度能够快速确定。模糊度确定以后采用取整法或者置信区间法将求得的实数模糊度固定为整数,然后将正确的整周模糊度回代入法方程解算出准确的基线向量解,求出基线的方位角以及俯仰角。采用这种方法可以加快整周模糊度确定的速度,大大降低了初始化所需的时间。
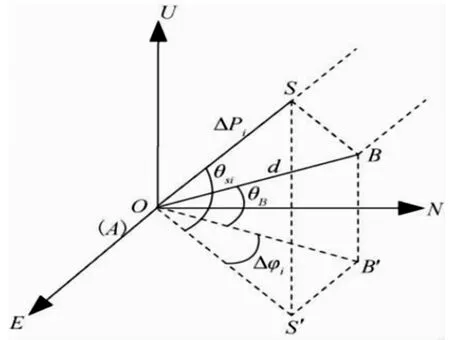
图1 短基线AB在空间直角坐标系中示意图
如图1所示,假设天线p安置在基线端点A上,天线q在B上,过点B做垂直于A同卫星i连线的垂线,交点为S。那么基线AB到卫星i的信号传播距离差 可以表示为:
ΔPi=d[sinθsisinθB+cosθsicosθBcosθBcosΔφi]
(11)
同理基线AB到卫星j的信号传播距离差Δpj可以表示为:
ΔPj=d[sinθsjsinθB+cosθsjcosθBcosθBcosΔφj]
(12)
那么ΔPi-ΔPj为:
d[(sinθsi-sinθsj)sinθB+cosθsicosθBcosθcosΔφi-cosθsjcosθBcosθBcosΔφj]
(13)
由观测方程(10)可知:

(14)

3 双天线快速定向仪系统介绍
本文采用Trimble公司生产的BD982 OEM板以及两个GNSS天线研制出一套GNSS双天线快速定向仪。该设备支持了最新的GNSS信号,并具备双天线多系统载波相位差分功能。它不仅支持GNSS的 L1/L2/L5 频段和 GLONASS 的 L1/L2 频段信号,还可以提供伽利略系统的兼容功能,同时支持中国北斗的 B1/B2 频段。设备的主要结构如图2所示。

图2 GNSS双天线定向仪组装结构图
图2是该定向仪的组装结构图,它主要由天线、接收机板卡、定向软件三部分组成。BD982 OEM板以及完成组装后的GNSS定向仪外观如图3所示。

图3 BD982 OEM板和GNSS定向仪外观图
该定向仪采用了双天线GNSS测量的导航系统,采用 220 信道 Trimble Maxwell 6 双芯片技术,支持板载双天线连接。每个天线分别将单独信息传递给处理器,对基线进行计算。系统中集成了基于visual c#环境自行开发的定向软件,该软件不但具有实时解算主天线位置、基线坐标方位角以及俯仰角的功能,而且能够通过网口将定向结果实时传输到计算机,用户可在计算机上实时获取并记录基线坐标方位角等信息。相关软件界面如图4所示。

图4 定向系统软件及数据分析界面
4 短基线定向实验结果与分析
采用本文研制的双天线GNSS定向仪分别对0.5m、2.9m、7.2m、33.5m四条基线进行了短基线定向实验。每条基线观测三个时段,每个时段观测10 min,采样间隔为1 s。大量的实验结果表明,该定向仪首次定向时间为20~30s,远远低于其他双天线定向设备1~3 min的初次定向时间。四条基线前1000个历元的定向结果分布如图5所示。

图5 定向结果分布图
由图5可以看出,采用该定向仪系统进行定向时,基线长度越长,定向精度越高。下面采用GNSS定向系统软件计算各长度基线每一时段观测数据的中误差,计算结果见表1。
表1各长度基线定向中误差

基线长度(m)第一时段中误差(″)第二时段中误差(″)第三时段中误差(″)平均值中误差(″)传统定向仪标称精度(″)0.5511.7477.9437.9475.8—2.992.987.391.390.5—7.255.138.547.346.9>180(0.05°)33.59.410.312.910.9>36(0.01°)
由上表可知,当采用本定向系统对短基线进行定向时,定向精度远高于其他双天线定向设备同等长度基线的标称精度。
5 结束语
本文首先推导了GNSS双天线定向的观测方程,提出了一种快速解算整周模糊度的方法。利用一块BD982 OEM板以及两个GNSS天线研制出一套GNSS双天线快速定向仪设备,采用visual c#等工具编写了一套GNSS定向系统软件,该软件具有快速解算定向结果、实时显示定向信息、记录和分析定向数据等功能。大量的实验数据表明:该系统能够快速初始化,在短基线定向模式中,其定向精度远高于其他定向设备的标称精度。该定向系统满足用户提出的各项要求,目前已经交付使用。
[1]洪绍明,杨永平,段德磊. 常用定向方法综述及其比较[J].勘察科学技术,2008(1):52-56.
[2]崔秋丽.一种简易GPS定向仪的实现[J].广西轻工业,2011(11):64-65.
[3]范胜林,胡国辉,林雪原等. GPS定位定向系统的研制[J].仪器仪表学报,2014,25(6):821-824.
[4]许其凤,丛佃伟,董明. 主要定向技术比较与GPS快速定位定向仪研制进展[J].测绘科学技术学报, 2013, 30(4):349-353.
[5]崔建勇,杨力,任锴等.基于GPS的短基线定向测量及精度分析[J].测绘信息与工程, 2008, 33 ( 2 ):12-15.
[6]沈健. GPS快速定向仪技术[D].长沙:国防科技大学,2003.
[7]张则宇,刘智超,董海静.三种精密定向方法在短距离上的比较分析[J].测绘地理信息,2013,38(5):8-12.
[8]王先全,吴敏,冯济琴等. GPS双天线定向系统及优化模糊度搜索算法[J].测绘科学技术学报,2009, 26 (5):316-319.
[9]李征航,黄劲松. GPS测量与数据处理[M].武汉:武汉大学出版社,2010.
[10]王先全,吴敏,冯济琴等.短基线GPS定向系统及搜索模糊度优化算法的研究[J].测绘科学,2009, 34 (4 ):47-50.
Research on Dual Antenna GNSS Rapid Directional System
Li Fupeng, Zhang Chao, Zhan Yinhu
Information Engineering University, Zhengzhou 450001, China
In order to solve the overlong initialization time and low direction precision problems of current GNSS direction finder, a GNSS dual antenna directional observation equation is deduced and a fast integer ambiguity resolution method is put forward in this paper. A GNSS dual antenna rapid directional instrument system is developed using the Trimble BD982 OEM board, and a set of full-featured orientation system software are programmed based on user requirements. The experiment results show that the directional system can realize fast initialization. Compared with traditional GNSS direction finder, the initialization time is shortened significantly and directional precision is improved obviously.
GNSS; dual antenna; integer ambiguity; directional
2015-11-13。
国家自然科学基金资助项目(41174025,41174026)。
李夫鹏(1990—),男,硕士研究生,主要从事GNSS精密数据处理及应用研究。
P228
A
