基于天绘一号卫星三线阵影像立体匹配的自动云检测
2016-11-04胡振龙
胡振龙,吴 腾,张 勇
1.中国天绘卫星中心,北京,102102;2.武汉大学遥感信息工程学院,湖北 武汉,430079
基于天绘一号卫星三线阵影像立体匹配的自动云检测
胡振龙1,吴腾2,张勇2
1.中国天绘卫星中心,北京,102102;2.武汉大学遥感信息工程学院,湖北 武汉,430079
有云场景对立体影像的自动地形提取带来很大影响,检测云区、利用无云区域的影像进行立体匹配获得DSM(Digital Surface Model),也是DSM自动化生产必须考虑的一个问题。本文基于云一般与地表分离的知识,利用密集匹配的DSM数据和参考DEM数据,结合高程与影像灰度信息提取出云区域,同时解决了云区域自动检测和地形提取。通过天绘一号卫星影像数据进行试验,无雪情况下云提取的正确率能达到95%;自动匹配的DSM也能有效地剔除云等因素的干扰,利用已有DEM数据进行修补,提高了成果质量。
立体影像;密集匹配;地形配准;云检测
1 引 言
卫星影像中云的存在,导致可用信息缺失,给地形信息自动提取带来很多错误。从物理和图像特性看,云是十分复杂的目标;同时含云量是衡量卫星影像质量的重要指标。早期云检测主要靠人工做出判读,费时且结果带有很大主观性。因此,高效云区域识别和检测方法成为光学遥感影像研究中的热点[1]。
云检测面对的主要问题包括:云分布不规律、形态多样、有厚薄之分;亮度、光谱特性与雪接近;雪域对云提取有很大影响等。随着遥感图像处理技术的发展,国内外已有大量云检测研究成果[2-6]。从数据源来说,可分成两大类:利用单一时相的影像数据进行判定和利用多时相的影像数据进行判定。前者检测结果与选用阈值有很大关系,很难识别薄云,且无法排除雪域及雾霾影响,容易出现错误分类;后者则会因为时间变化造成地物变化,或不同时相影像色调引起差异而引起错误分类。
基于云一般脱离地表这一知识,结合已有的DEM作为参考(如全球公开SRTM,简称“参考DEM”),本文针对具有立体成像能力的光学卫星影像,通过立体视觉的方法,提出了一种新的云区域检测和识别方法:通过立体影像密集匹配得到数字表面模型M-DSM(Matching Digital Surface Model,指新匹配的DSM),与参考DEM配准,再通过高程比较,得到影像上疑似云区域的种子点,最后结合影像灰度信息对疑似区域进行分类和区域增长得到最终的云检测结果,同时利用参考DEM填补M-DSM中因为云等影响造成的误匹配区域。
2 自动云检测流程与方法
通过卫星立体像对的密集匹配,可自动获得摄影地区的地形三维信息,但云遮挡区域使得匹配的M-DSM中出现大量错误。
通过与参考DEM进行地形比较提取出匹配错误区域,作为疑似云区域;结合影像上的灰度信息区域增长和疑似云区域进行分类,得到最终云检测结果。算法分为地形配准与比较、云区域种子点提取和云区域自动识别三个主要步骤,如图1所示。
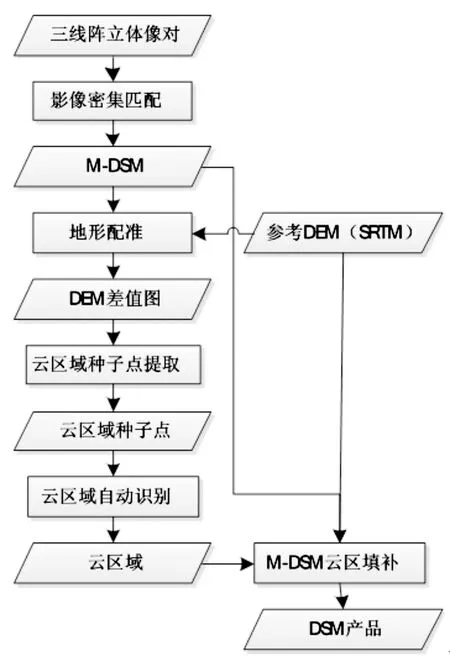
图1 云区域自动提取总体流程图
地形配准与比较,是将立体像对密集匹配获得的M-DSM,与参考DEM地形配准后进行高程比较,得到DEM差值图。
云区域种子点提取,是在DEM差值图中自动提取出地形高差较大的空间点,将其投影到遥感影像中,作为提取云区域的种子点。
云区域自动识别,是根据影像信息对疑似云区域的种子点进行区域增长和分类,去除低亮度纹理缺乏区域和雪区域,得到云区域。
M-DSM云区填补,使用参考DEM填补误匹配空洞及错误区域。
2.1地形配准与比较
(1)多影像多基元匹配获取M-DSM
首先使用遥感影像的立体像对通过密集匹配获得摄影区域的数字表面模型,即M-DSM。本文采用的影像匹配方法是“多影像多匹配基元”(Multiple Primitive Multi-image)方法,利用多视匹配提高可靠性、多特征匹配结果增强数字表面模型反映微细地形地貌的能力[7,8]。算法采用由粗到细的多级影像匹配策略,结合多种匹配基元(特征点、格网点和特征线)的匹配结果。
图2为采用天绘一号卫星5m分辨率三线阵影像密集匹配结果,格网间距25m(本景影像无云)。

图2 无云影像匹配DSM结果
(2)M-DSM与参考DEM的配准
在比较M-DSM和参考DEM之前需要对两者进行配准。为得到可靠的匹配结果,本文引入一种基于地形特征线的匹配算法,即首先分别在参考DEM与M-DSM上提取地形特征线,然后通过投票算法实现两者整体套合,再进行特征点局部最小二乘相关匹配提高匹配精度,取得良好稳定的匹配效果。图3为地形配准的算法流程图。

图3 地形配准算法流程
山脊线和山谷线是最常用的地形特征线,本文采用基于地形表面流水物理模拟分析的方法提取山脊线和山谷线,见图4。

(a) 山谷线 (b) 山脊线图4 地形特征线提取示例
然后采用投票算法,实现地形特征线的整体套合,即粗匹配,得到M-DSM与参考DEM的整体坐标偏移。将待匹配的地形数据类比为栅格图像,即M-DSM特征线上的骨架点作为特征点,按照整体匹配获得的初始坐标差值预测到参考DEM上,在一定搜索范围进行相关匹配,最后使用最小二乘方法得到高精度匹配结果。
2.2疑似云区域种子点提取
M-DSM与参考DEM配准之后,通过差值比较,得到疑似云区域种子点。本文采用自适应算法,将M-DSM与校准后的参考DEM比较,根据初始高程阈值剔除误差点,再根据其余空间点统计出单位权中误差(RMSE),见(1)式。
(1)
其中,N为总点数;Zi为第i点高程;Zref为第i个点在校准后的参考DEM上对应的高程;Zthreshold为输入的初始高程阈值。新的自适应阈值按照(2)式确定。
(2)
根据此阈值,遍历一次比较M-DSM产品和校准后的参考DEM,提取其中高程差大于自适应阈值的格网点,通过三线阵正视影像RPC参数将这些点投影到影像上,得到种子点的像面坐标。
2.3云区域自动识别
疑似云区域种子点,并不都是云区域或雪区域造成的,低亮度纹理缺乏区域(例如水和阴影)也会造成误匹配。进一步自动识别的算法流程如图5所示。

图5 云区域自动识别流程
(1)低亮度纹理缺乏区域的去除
低亮度纹理缺乏区域中的种子点,可通过统计种子点集合的灰度直方图予以清除。主要过程为判断影像是否含有云,如果存在云,除去低亮度缺乏纹理区域的种子点。
图6为典型的无云影像和有云影像中的种子点区域集合的灰度直方图示例。
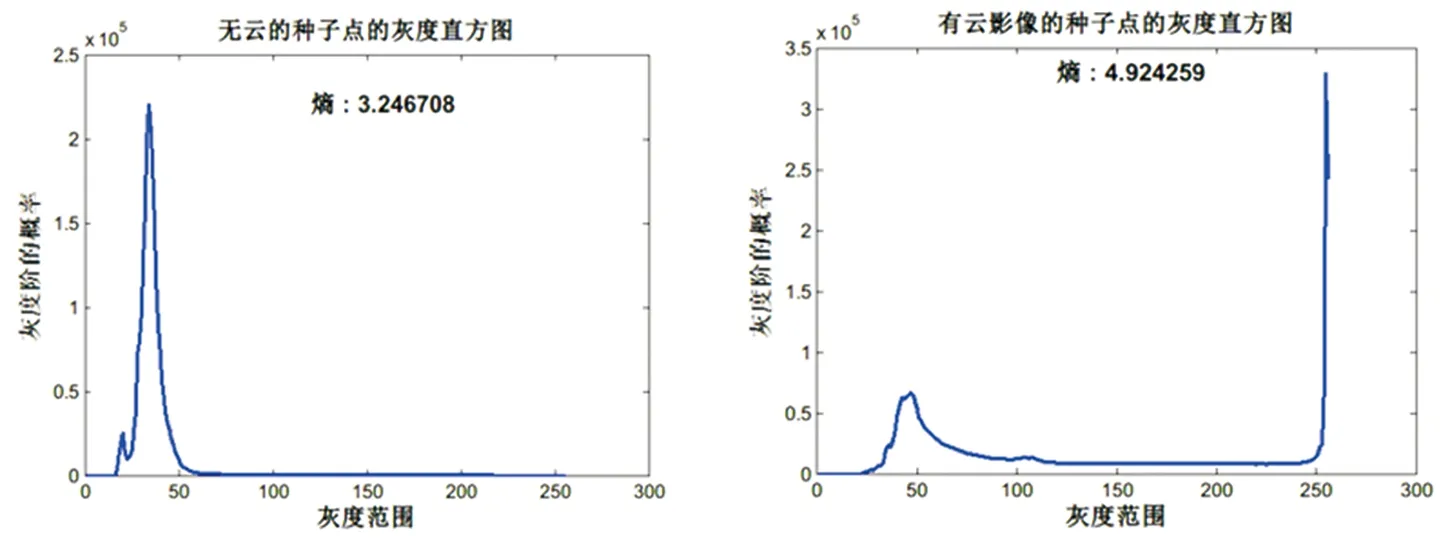
图6 无云(左)、有云(右)种子点直方图
上图中,左图种子点是低亮度缺乏纹理造成,直接予以清除;右图灰度值集中在245到255之间的种子点,因此,可以判定有云存在、予以保留;右图灰度值集中在50左右的种子点,是低亮度缺乏纹理造成,予以清除。
(2)种子点区域增长
清除错误的种子点之后,其余一般为云区域和雪区域。以种子点像素作为起点,将周围邻域中与其相似的像素,合并到种子像素所在的区域中,迭代操作,直到再没有满足条件像素可以包括进来。
分别统计前景(种子点区域像素集合)和背景的灰度值直方图,得到前景和背景之间的对比度信息,进而确定区域增长中的灰度差阈值。
图7为有云影像及其背景直方图,图8为有雪影像及其背景直方图。云和雪区域都属于高亮度区域,背景整体偏暗、灰度值在直方图上集中于左侧的低灰度值范围。此时,云或雪边界上有较强的对比度,为提取出完整云区域,可以用较大的阈值(如7-10)。

图7 有云影像(左)和对应的背景直方图(右)

图8 局部有雪影像(左)和对应背景直方图(右)
图9和图10均为大面积雪域影像,且图10中还有薄云及薄雾。从其背景直方图可知,背景像素灰度值大部分位于高亮度区域,使得云雪边界对比度偏低。因此,种子点区域增长时,采用较低的灰度差阈值(如3-5)。
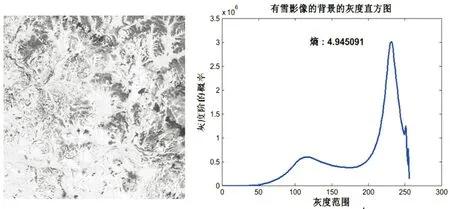
图9 大面积雪域影像(左)和对应背景直方图(右)

图10 云雪混合影像(左)和对应背景直方图(右)
(3)云和雪的分类
通过种子点区域增长,可得到影像中的云和雪区域。采用图像处理的方法进行云雪分类难度很大,本文基于影像密集匹配的M-DSM与参考DEM相比较的方法,可以为云雪区分提供有效信息:云是漂浮在空中的运动目标,在前正后三视影像中的位置不同,匹配出的地形信息高于参考DEM,能得到大量种子点;雪则是覆盖在地表的静止区域,只得到较少的种子点;通过区域增长之后,云、雪区域最初的种子点像素数与增长后区域总像素个数的比值有差异(实验中使用的阈值是0.1),从而区分出云和雪。
图像中有云的部分(图11左侧)匹配的M-DSM错误较多(图11右侧多边形内),所以会有较多的种子点,增长得到的点数很少。
图像中有雪的部分(图12左侧)匹配的M-DSM错误很少(图12右侧多边形内),所以种子点较少,但是增长得到的点数很多。

图11 有云影像(左)和对应M-DSM图(右)

图12 有雪影像(左)和对应M-DSM图(右)
3 实验结果分析
基于以上自动云检测方法,利用天绘一号卫星5m分辨率三线阵1B级前、正、后三视影像进行了上万景生产和核查检验。参考DEM采用的是SRTM,M-DSM为三线阵立体像对密集匹配获得,格网间距为25m。
对DSM匹配的干扰主要有水域、无纹理区域、云区域等,对云区域提取的干扰主要是雪区域。将M-DSM与参考DEM进行比较,得到疑似云区域的种子点,结合影像信息,可以有效剔除水域和无纹理区域干扰。通过种子点区域增长前后的面积比较、以及影像的灰度信息,能有效区分云和雪。

图13 厚云、薄云和雾霾分布的云检测
图13的影像中有厚云、薄云和雾霾分布。雾霾具有一定透光性,其区域对影像匹配产生微弱的影响,在M-DSM中体现不出误匹配区域;薄云遮挡地表,在M-DSM上产生了大片误匹配区域;提取的云区域中有厚云和薄云,在M-DSM下半部分出现大量错误,但在最后DSM结果能有效修正。

图14 有雪分布时云区域的检测
图14影像中有云也有雪。匹配结果中,M-DSM上雪域地形基本得到保持,云区域则有误匹配区;最终提取结果中只有云区域。最后DSM结果中,修正了云区域影响。
为验证该方法的有效性和正确率,通过人工目视勾出云的区域,与自动提取的云区域进行对比,结果表明,对于有云同时对比度较大的情况下,可以达到95%以上正确率(正确像素数/总像素数),能有效提取出云及薄云区域;在云和雪同时存在时,能有效避免雪区域的干扰。
4 结 论
本文提出了一种基于地形配准的云区域自动提取算法。云对立体影像自动地形提取带来干扰,但却可以用来提取影像中的云区域,即通过配准和比较影像匹配获取的M-DSM与参考DEM数据,提取出错误匹配点,将其投影到卫星影像,作为云区域提取的种子点,结合影像信息识别出云区域,同时引用参考DEM,填补M-DSM中由于云区域等原因引起的匹配错误区域,提高M-DSM的质量和利用率。
本方法的不足之处:因为要结合密集匹配的M-DSM进行处理,M-DSM的采样间隔使得小区域的云可能提取不出来;另外由于立体相机是全色相机,没有充分利用多光谱信息。
[1]侯舒维,孙文方,郑小松.遥感图像云检测方法综述[J].空间电子技术,2014,11(3):68-76.
[2]丁玉叶.面向MODIS数据的云检测方法研究[D].哈尔滨:哈尔滨工业大学,2013.
[3]赵晓.高分辨率卫星遥感图像云检测方法研究[D].哈尔滨:哈尔滨工业大学,2013.
[4]徐慧.遥感图像中的云区域检测及去除方法研究[D].合肥:安徽大学,2011.
[5]陈振炜,张过,宁津生等.资源三号测绘卫星自动云检测[J]. 测绘学报,2015,44(3):292-300.
[6]宋小宁,赵英时.MODIS图像的云检测及分析[J].中国图像图形学报,2003,8(9):1079-1083.
[7]张祖勋.数字摄影测量与计算机视觉[J]. 武汉大学学报·信息科学版,2004,29(12):1035-1039.
[8]张力,张继贤.基于多基线影像匹配的高分辨率遥感影像DEM自动生成[J]. 武汉大学学报·信息科学版,2008,33(9)943-946.
Automatic Cloud Detection Based on Three-line Array Image Stereo Matching of TH-1 Satellite
Hu Zhenlong1,Wu Teng2,Zhang Yong2
1. Tianhui Satellite Center of China, Beijing 102102, China 2. School of Remote Sensing and Information Engineering, Wuhan University, Wuhan 430079, China
Cloud scene influences the automatic terrain extraction from stereo images greatly. Cloud detection and DSM extraction through stereo matching with cloudless images must be considered in DSM automated production. In this paper, based on the knowledge that cloud is far away from the earth's surface, the cloud area is extracted by using dense matching DSM and reference DEM data and combining elevation data with image grey value information. In this way, the problems of cloud detection and automatic terrain extraction are solved simultaneously. TH-1 satellite images are used to conduct test. It turns out that the accuracy of cloud extraction can reach 95% when there is no snow, the automatic matching DSM can effectively prevent interference from cloud or other factors, and the quality of final result can be improved by modification with existing data.
stereo images; dense matching; terrain registration; cloud detection
2016-03-16。
胡振龙(1975—),男,高级工程师,主要从事航天摄影测量数据处理方面的研究。
P231
A