航天器姿态稳定的自适应有限时间控制
2016-11-03高计委蔡远利
高计委,蔡远利
(西安交通大学 控制工程所,西安 710049)
航天器姿态稳定的自适应有限时间控制
高计委,蔡远利
(西安交通大学 控制工程所,西安710049)
针对刚体航天器姿态控制问题,设计了有限时间状态反馈控制律。考虑存在惯性不确性和外部扰动条件下,采用四元数将姿态系统模型转化为Lagrange模型,并且首次将其以状态空间形式表示。其次,基于齐次性理论来设计标称控制器,在此基础上利用自适应滑模方法抑制总不确定进而使姿态系统能够在有限时间内收敛到原点,并且利用Lyapunov理论对其进行证明。该算法不需要事先获得总不确定的边界,对实际问题具有很好的实用性和有效性。数值仿真对比表明,此方法具有较快的收敛速度、较高的控制精度及较强的鲁棒性。
航天器姿态控制;有限时间稳定;鲁棒性;自适应滑模
0 引言
航天器的姿态稳定和跟踪控制是一类具有强非线性、强耦合特性的控制问题,一直都是航空航天领域的研究热点与难点。在航天器的控制理论及其应用技术方面,航天器的姿态稳定和跟踪控制也随着科学技术的发展而得到密切的关注和广泛的研究。近年来,该领域取得许多成果,如PD形式姿态控制[1]、非线性最优化控制[2]、自适应控制[3]、Back-stepping控制[4]、滑模控制[5]等。上述的这些非线性控制方法虽然能保证闭环控制系统的稳定,但是只得到系统在平衡点处的渐近稳定。因此,从时间优化的角度来看,保证控制系统有限时间收敛的控制方法[6-9]才是时间最优的控制方法。此外,与其他控制方法相比,在有限时间控制下的闭环系统还表现出更高的控制精度及更好的抗扰动性。由于有限时间控制算法拥有上述的优越性,所以近年来其在航天器姿态控制系统中的应用也得到了广泛的重视。
Jin等[10]较早将有限时间收敛特性的终端滑模应用于姿态跟踪控制中,取得较好控制效果。但终端滑模具有奇异性,所以Li等[11]采用非奇异终端滑模对控制器进行设计,避免在输入中出现的奇异现象。另外,Hong等[12]基于齐次分离准则为机械臂系统设计了有限时间控制器。采用相同方法,Du等[13]利用四元数将姿态稳定系统转化为Lagrange形式,分别设计了局部与全局姿态有限时间控制器;而方辉等[14]则针对修正罗德里格参数描述的Lagrange模型,提出航天器局部有限时间控制器。李贵明等[15]则将加幂积分器与齐次理论结合设计姿态控制器,不但抑制了扰动力矩,还使状态有限时间收敛到原点的邻域; Du等[16]利用类似方法设计全局有限时间姿态跟踪控制器,并且将其拓展到姿态同步的应用中。虽然上述姿态控制器取得有限时间特性,但对于存在惯性不确定与外部扰动时,这些控制器的鲁棒性能不佳或者需要知道这些不确定的边界,而这在实际应用中是不现实的。
针对存在惯性不确定及外部干扰的刚体航空航天飞行器,本文提出了一类由四元数作为姿态描述的飞行器自适应有限时间控制器。首先,将飞行器姿态动力学与运动学模型转化成类Lagrange模型,进而写成状态空间形式。然后,分两步设计控制律:第一步是标称控制,它是连续但不光滑的,而且能在没有参数不确定与外部扰动时有限时间稳定二阶姿态系统;第二步为补偿控制,采用自适应积分滑模方法,补偿系统的总不确定,保证控制目标的实现。所设计的姿态稳定控制器能有限时间镇定系统,抑制内外扰动,取得更高的控制精度。另外,不需要事先知道总不确定的边界,具有很强的实用意义。
1 系统与问题描述
1.1有限时间稳定定理
首先给出有限时间稳定的相关定义,考虑如下的非线性系统:
(1)
式中f(x)为连续函数,且f(0)=0。
如果系统 (1) 是Lyapunov稳定的,而且存在一个时间函数T(x),使得对于所有的t≥T(x),有x(t)=0,则称系统 (1) 是有限时间稳定的;如果具有全局性,则称全局有限时间稳定。
为便于分析,引入齐次函数的定义,对于连续函数V(x)和(r1,…,rn)∈Rn,ri>0,如果对于任意的ε>0,存在标量k,满足:
则称函数V(x)关于(r1,…,rn)具有齐次度k。
令f(x)=(f1(x),…,fn(x))T,若对于任意的ε>0,存在标量k,满足:
则称系统(1)关于(r1,…,rn)具有齐次度k。
引理1[8]如果系统(1)具有负的齐次度,即k<0,并且其原点具有渐近稳定性,那么系统(1)的原点是有限时间稳定的。

1.2航天器姿态系统模型
飞行器姿态的运动学描述方法有方向余弦、欧拉角、四元数和修正的罗德里格参数等。本文采用四元数来描述刚体飞行器的姿态运动学,其表达式为
(2)

考虑飞行器姿态动力学方程:
(3)
式中J∈R3×3为正定的对称矩阵,表示飞行器的转动惯量矩阵;τ为飞行器的姿态控制力矩;d为有界的外部干扰向量。
2 控制系统设计
上述姿态模型分别采用四元数与欧拉角速度作为变量来表示运动学与动力学方程,可在此先将其转化为Lagrange模型,再写成状态空间的形式,以便于控制器的设计。
2.1基于四元数的Lagrange模型及状态空间
命题1:根据假设q0(t)≠0对t≥0,姿态运动学与动力学可写成下面Lagrange形式:
(4)
其中
D=MTd+d′
(5)

(6)
其中
再将J=J0+ΔJ代入式(6)可得式(4),证毕。

(7)
其中
2.2鲁棒有限时间控制器设计
对式(7)采用如下基本控制器:
(8)
其中,w=[w1,w2,w3]T∈R3为实际控制输入。w的设计分为两部分,即w=wn+wc(wn为标称控制,wc为不确定控制)。标称控制设计是在无扰动情况下使系统能在有限时间内到达原点,补偿控制是在总的不确定扰动下也能完成有限时间控制目标。
定理1考虑如下二阶积分链系统:
(9)
对于任一个α2∈(0,1),如下状态反馈控制器能够使系统(9)在平衡点x=0处有限时间收敛:
(10)
其中,参数k1,k2>0使得多项式s2+k2s+k1是Hurwitz的,α1,α2满足α1=α2/(2-α2);Sig(xi)αi=[sig(xi,1)αi,sig(xi,2)αi,sig(xi,3)αi]T(i=1,2),sig(y)v=sign(y)|y|v(v>0)。
证明:选取一个Lyapunov函数:
(11)
对上式关于t求导可得
由LaSalle不变集定理可知,系统(10)对于平衡点x=0是渐近稳定的。系统(10)对(2/(1+α1),2/(1+α1),2/(1+α1),1,1,1)的齐次度为α*=α2-1<0,根据引理1可得,标称控制可使系统(10)有限时间稳定。另外,定理1的单输入单输出形式在文献[8]中已有介绍,这里可理解对其的高维扩展。
上述标称控制器(11)在有限时间内使积分链系统(10)稳定到原点,但对于受内外部扰动影响的姿态稳定系统(3)或(7)不具有鲁棒性。针对这个问题,本文利用自适应滑模控制器与上述提出的控制器(11)结合,在保证姿态稳定系统(7)有限时间收敛的同时也使系统具有鲁棒性。在设计控制器之前,首先定义如下积分滑模流形:
(12)
定理2考虑系统(7),若总不确定扰动满足有界假设,则控制律:
(13)
可使姿态系统轨迹(7)在有限时间内稳定,其中Sign(s)=[sign(s1),sign(s2),sign(s3)]T。
注1:由于不连续控制的原因,闭环系统会出现抖动现象。这种高频振动会影响控制性能,严重时会导致系统不稳定。为了消小抖振,采用饱和函数代替开关符号函数:
Sat(s)=[sat(s1),sat(s2),sat(s3)]
(14)

2.3鲁棒自适应有限时间控制律设计
控制律(13)可保证姿态误差系统(7)的稳定性和鲁棒性,但增益需要满足不等式,然而实际工程中,总的不确定扰动边界是很难获得,因此下面提出一种自适应的补偿控制律的设计方法,控制增益能够根据系统状态自动调节,从而不需要事先知道系统不确定的界。

(15)

证明:首先选择一个Lyapunov函数:
(16)



(17)

(18)

(19)
(20)
其中
由引理可得系统(6)或(7)能在有限时间收敛到原点。
3 仿真与分析
为了验证提出的有限时间控制器的有效性,利用MATLAB/SIMULINK软件,对姿态系统进行仿真研究。为了对比,将经典PID控制器:
(21)
与提出的控制器同时进行仿真。航天器模型和控制器参数如表1所示,其中不确定惯性量和外部力矩干扰也在考虑当中。在仿真中,用d′代替d便于比较不同控制器的控制性能,见表2。

表1 航天器模型与控制参数
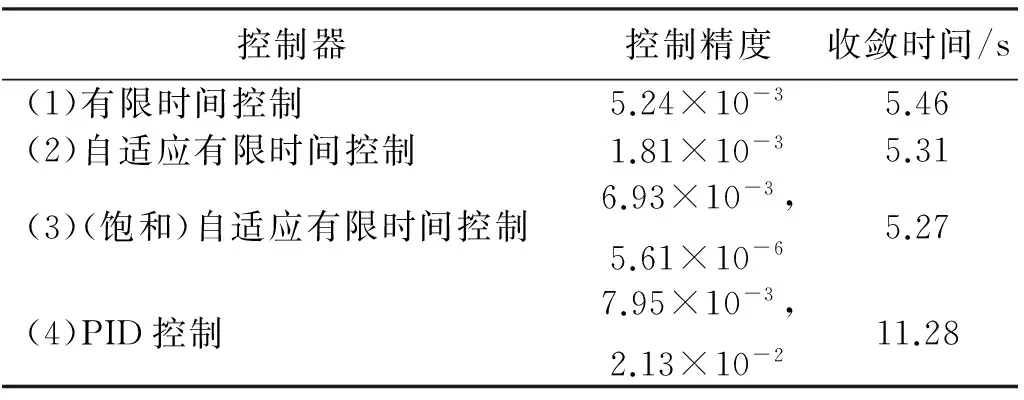
表2 不同控制器下仿真对比结果
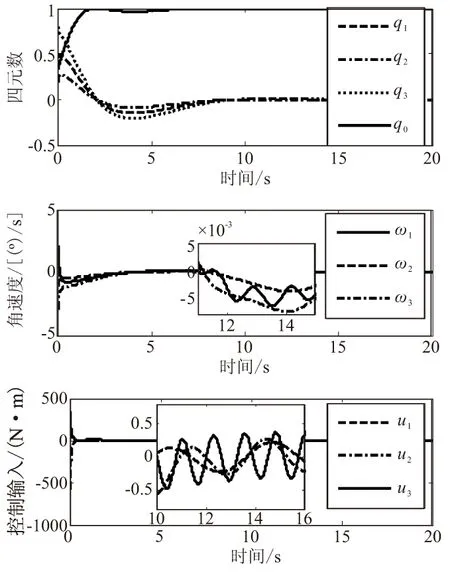
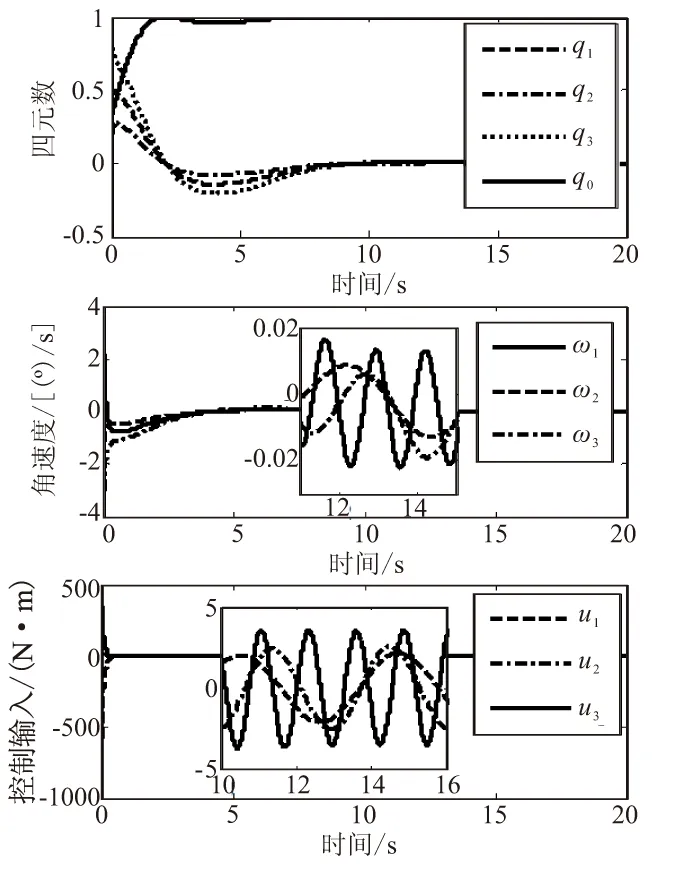
图1~图4中分别描绘四元数、角速度、滑模变量与输入控制量随时间变化曲线,系统状态在约5.2 s以后收敛。通过图2~图4的对比,可发现利用自适应律和饱和函数取代开关函数的方法,都能减少滑模变量的抖振。由图2、图3可看出抖振的水平减小一半,并且输入幅值随之减小。另外,观察图3、图5可知增益值在滑模变量到达滑模面后即趋于稳定。
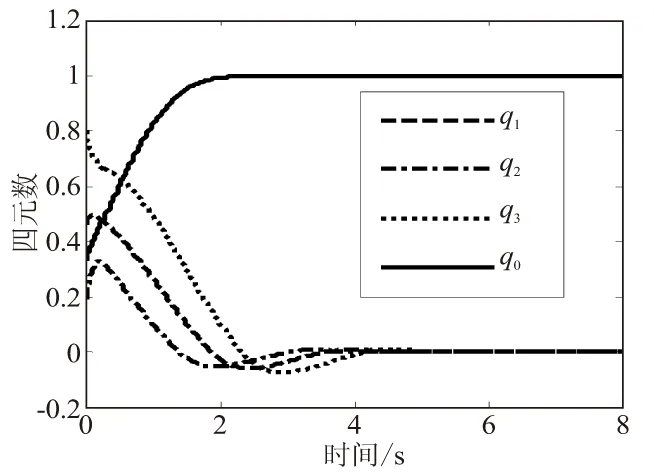
图1 四元数响应曲线
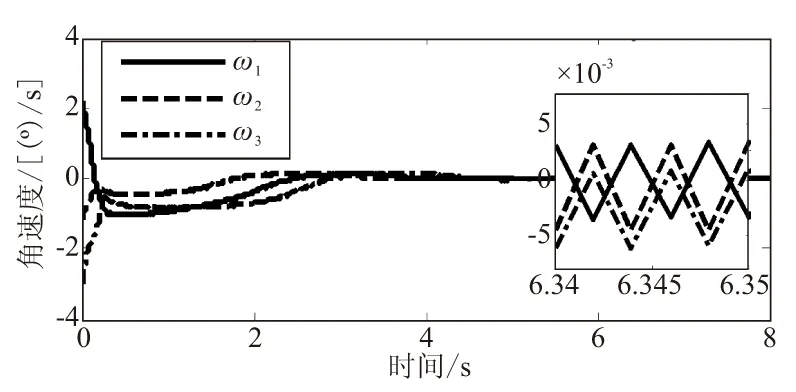
(a) 角速度变化曲线
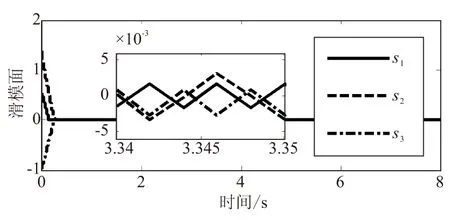
(b) 滑模曲线
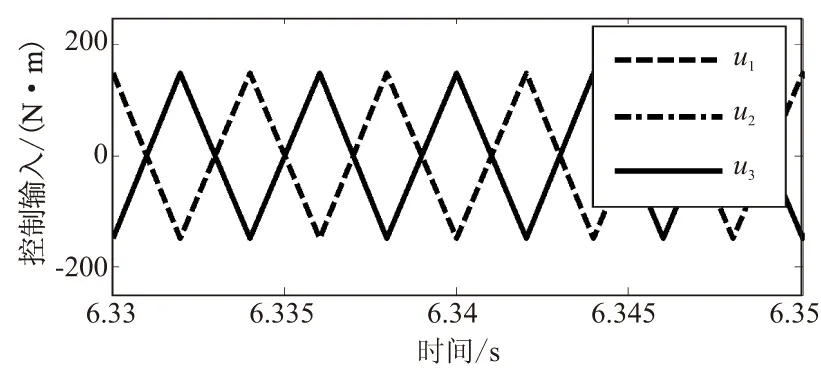
(c) 转矩输入
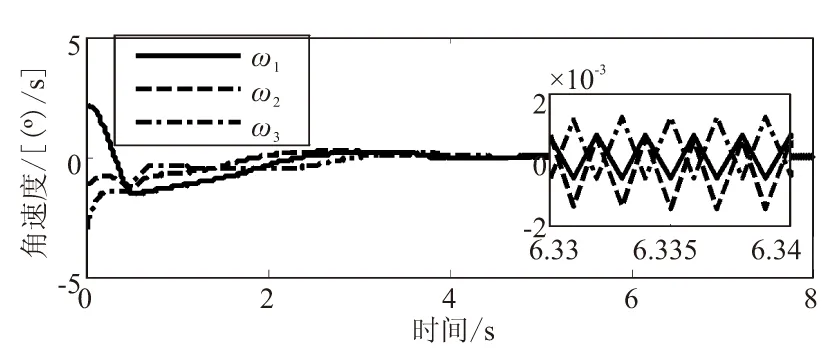
(a) 角速度变化曲线
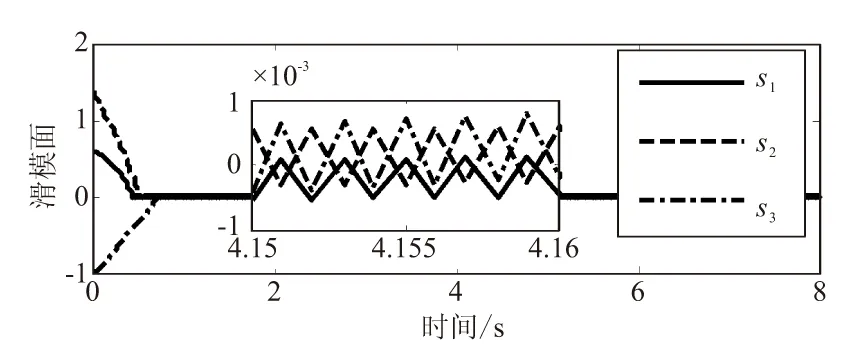
(b) 滑模曲线
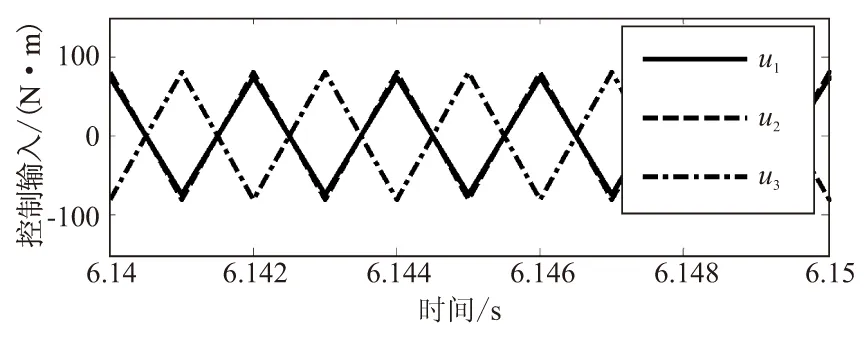
(c) 转矩输入

(a) 角速度变化曲线
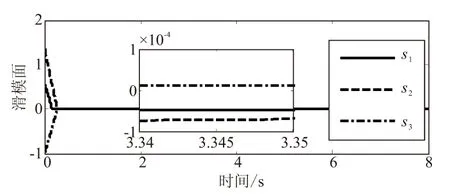
(b) 滑模曲线
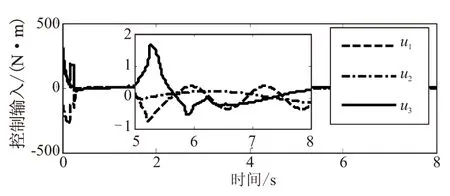
(c) 转矩输入
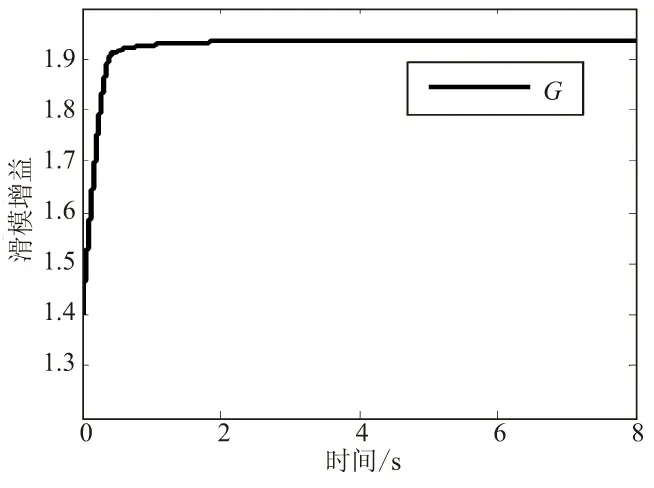
图5 基于定理3和(14)自适应增益
图6显示利用经典PID控制器对有相同初值、不同惯性不确定及外界扰动的姿态系统进行控制,其稳定时间约为11.3 s。在第一种扰动下,设计的2种饱和函数有限时间控制算法的仿真结果相似。同样,由于提出的控制器的参数没有改变,所在第二种扰动下的仿真结果变化也不大。由图1~图6中结果对比可明显发现,指数收敛率缓慢;众所周知,PID控制器参数调节不易。其次,从图6可知,当初值相同、惯性不确定及外界扰动不同时,其控制精度与鲁棒性变差,不如提出的控制器 (8)、(10)和(15)那样具有较强的实用性。详细的对比结果在表2中给出,其中收敛时间指角速度ω进入并保持在范围|ωi|≤0.02(i=1,2,3)内所需的时间,其中鲁棒有限时间控制器在受到2种不确定扰动时,基本变化不大,而用饱和函数代替开关函数的自适应有限时间控制器的控制精度虽然也发生变化,但是还能一直保持在较高的范围内。
(a)第一种情况
(b) 第二种情况
4 结论
(1)将状态空间概念引入以四元数表示的刚体姿态稳定系统中,有利于各种非线性控制算法的应用。
(2)基于所述转化模型设计的鲁棒有限时间控制器使得姿态稳定系统在内外部扰动下能快速收敛,并且不需要知道扰动的边界,具有很强的实用性和较高的控制精度。
(3)用饱和函数代替符号函数可有效减小滑模控制带来的抖振,提高了控制精度,仿真结果验证了所提方法的有效性。
[1]Wen J T Y, Kreutz-Delgado K. The attitude control problem [J]. IEEE Transactions on Automatic Control, 1991, 36(10): 1148-1162.
[2]Sharma R, Tewari A. Optimal nonlinear tracking of spacecraft attitude maneuvers [J]. IEEE Transactions on Control Systems Technology, 2004, 12(5): 677-682.
[3]Ahmed J, Coppola V T. Adaptive asymptotic tracking of spacecraft attitude motion with inertia matrix identification [J]. Journal of Guidance, Control, and Dynamics, 1998, 21(5): 684-691.
[4]孙平, 刘昆. 小型固体运载器一级飞行段姿态控制方案研究[J]. 固体火箭技术, 2010, 33 (3): 242-246.
[5]Lu K, Xia Y, Zhu Z, et al. Sliding mode attitude tracking of rigid spacecraft with disturbance [J]. Journal of The Franklin Institutes, 2012, 349(2): 413-440.
[6]Haimo V T. Finite time controllers [J]. SIAM Journal on Control and Optimization, 1986, 24(4): 760-770.
[7]Bhat S P, Bernstein D S. Finite-time stability of continu- ous autonomous systems [J]. SIAM Journal on Control Optimization, 2000, 38(3):751-766.
[8]Bhat S P, Bernstein D S. Finite-time stability of homo- geneous systems [C]//American Control Conference, New Mexico, USA, 1997, 2513-2514.
[9]Hong Y, Huang J, Xu Y. On an output feedback finite- time stabilization problem [J]. IEEE Transactions on Automatic Control, 2001, 46(2): 305-309.
[10]Jin E,Sun Z.Robust controllers design with finite time convergence for rigid spacecraft attitude tracking control [J].Aerospace Science and Technology, 2008,12(4):324-330.
[11]Li S, Wang Z, Fei S. Comments on the paper: Robust controllers design with finite time convergence for rigid spacecraft attitude tracking control [J]. Aerospace Science and Technology, 2011, 15(3): 193-195.
[12]Hong Y,Xu Y,Huang J.Finite time control for robot manipulators [J].Systems & Control Letters,2002,46(4):243-253.
[13]Du H, Li S. Finite-time attitude stabilization for a space- craft using homogeneous method [J]. Journal of Guidance, Control and Dynamics, 2012, 35(3): 740-748.
[14]方辉, 张爱华, 秦玉华. 刚体航天器姿态有限时间稳定控制 [J]. 系统工程学报, 2014, 29 (3): 299-308.
[15]李贵明, 刘良栋. 刚体卫星姿态的有限时间控制[J]. 空间控制技术与应用, 2011, 37(3): 1-8.
[16]Du H, Li S, Qian C. Finite-time attitude tracking control of spacecraft with application to attitude synchronization [J]. IEEE Transactions on Automatic Control, 2011, 56(11): 2711-2717.
[17]Bhat S P, Bernstein D S. Lyapunov analysis of finite-time differential equations [C]//Proceedings of the American Control Conference. Seattle WA, USA, 1995:1831-1832.
(编辑:吕耀辉)
Adaptive finite-time control for spacecraft attitude stabilization
GAO Ji-wei, CAI Yuan-li
(Institute of Control Engineering, Xi'an Jiaotong University, Xi'an710049, China)
In this paper, the finite time feedback control laws were designed for rigid spacecraft attitude control problem. Attitude system model was converted into Lagrange model based on unit quaternion in the presence of inertia uncertainties and external disturbances, and then initially expressed as state-space form. Next, nominal controller was designed based on homogenous theory, and further adaptive sliding mode approach was adopted to steer attitude system to the origin with the lumped uncertainties, while rigorous finite-time stable proofs were achieved in light of the Lyapunov theory. This algorithm requires no information about the lumped uncertainties, and it possesses practicability and effectiveness for realistic systems. Finally, numerical simulation analysis shows that these methodologies can achieve faster convergence, higher control accuracy and stronger robustness.
spacecraft attitude control;finite-time stability;robustness;adaptive sliding mode
2014-11-27;
2015-03-18。
国家自然科学基金(61202128, 61463029);宇航动力学国家重点实验室开放基金(2011ADL-JD0202)。
高计委(1985—),男,博士生,研究方向为滑模控制及在航天器中的应用。E-mail:jwgao2012@163.com
蔡远利(1963—),男,教授/博导,研究方向为飞行器制导控制与仿真。E-mail:ylicai@mail.xjtu.edu.cn
V448.2
A
1006-2793(2016)02-0275-06
10.7673/j.issn.1006-2793.2016.02.022