车路协同下基于速度引导的双周期干道绿波协调控制方法
2016-11-02荆彬彬卢凯鄢小文吴焕徐建闽
荆彬彬 卢凯,2† 鄢小文 吴焕 徐建闽,2
(1. 华南理工大学 土木与交通学院,广东 广州 510640;2. 东南大学 现代城市交通技术江苏高校协同创新中心,江苏 南京 210096)
车路协同下基于速度引导的双周期干道绿波协调控制方法
荆彬彬1卢凯1,2†鄢小文1吴焕1徐建闽1,2
(1. 华南理工大学 土木与交通学院,广东 广州 510640;2. 东南大学 现代城市交通技术江苏高校协同创新中心,江苏 南京 210096)
针对传统双周期干道绿波协调控制方法的不足,建立了一种新的双周期干道绿波协调控制模型,利用车路协同环境下车-车、车-路实时双向通信的特点,提出了一种基于加减速引导的双周期干道绿波协调控制方法,并结合算例对比分析了加减速引导前后车辆的通行效果。仿真结果表明:加速引导策略能够有效降低车辆的平均行程时间、平均延误时间与平均停车次数;减速引导策略则能够在保证平均行程时间与平均延误时间不增加的前提下,有效降低车辆的平均停车次数.
交通控制;车路协同;车速引导;双周期;绿波协调
干道绿波协调控制作为现代交通管理控制的重要手段,对于提高干道通行效率具有重要意义.在线控系统中,干道上各交叉口的信号周期通常相等,如果干道上某个交叉口的流量比较小,其所需周期时长接近公共周期的一半,则可以将公共周期的一半作为该交叉口的实际信号周期,从而形成双周期绿波协调控制[1].目前对于双周期绿波协调控制通常借鉴传统的干道绿波协调控制方法,如图解法[1- 2]、数解法[3- 4]、模型法[5- 7].然而利用上述传统方法得到的双周期绿波方案通常存在以下问题:①车辆由双周期交叉口按绿波带速行驶至公共周期交叉口时,会周期性出现“不阻滞-阻滞-不阻滞-阻滞”的情况;②车辆由公共周期交叉口按绿波带速行驶至双周期交叉口时,车队常被截断成两部分,破坏了绿波效果.
近年来,随着无线通信技术、互联网技术等相关技术的快速发展,车路协同系统受到广泛关注,成为智能交通系统的重要发展方向.利用车路协同环境下车辆与信号机之间可实时双向通信的特点,根据车辆当前的运动状态信息(如速度、位置等)以及信号机当前运行状况,实时引导车辆加速或减速,从而主动调整车辆行驶时间,为解决采用传统方法获取双周期绿波协调控制方案所存在的不足提供了新的技术理念与手段.Abu-Lebdeh等[8- 9]将行驶车速作为决策变量植入信号优化问题中,以车速、绿信比、相位差作为决策变量,建立了动态车速控制模型,并将该模型应用于路网协调控制中.Yang等[10]构建了车路协同系统的仿真应用体系架构,并利用VISSIM验证了速度引导策略的有效性.Niu等[11]利用车联网技术实时获取车辆状态、交通信号等信息,提出了“绿波速度引导”和“节能驾驶速度引导”两种动态速度引导策略.Yang等[12]提出了一种基于速度引导的干道交叉口信号控制方法,通过引导车辆加减速避免停车,从而降低了车辆的行程时间.Cai等[13]提出了一种基于速度引导与车路信息交互的无信号交叉口控制方法,以延误与停车最小作为优化目标,对引导车速进行优化控制.张存保等[14]利用车路协同技术可全面获取车辆运动状态信息的特点,以交叉口延误时间和停车次数最小为目标,建立了车路协同下的单交叉口信号控制优化方法.马万经等[15]利用车路协同环境下公交车-信号机可双向通信的特点,以公交优先通行及节能减排为优化目标,提出了公交车速与控制方案的协调优化方法.吴伟等[16]利用车辆-信号机可双向通信的特性,以流量与车速乘积最大为目标,建立了基于动态车速的干道相位差模型.
以上研究多是将速度引导策略用于单交叉口信号控制或干道绿波协调控制中,很少考虑双周期绿波协调控制的需求.基于此,文中将速度引导策略引入双周期绿波协调控制中,提出一种基于加减速引导的控制策略,以克服传统双周期绿波协调控制模型方法的不足.
1 传统双周期绿波协调控制问题

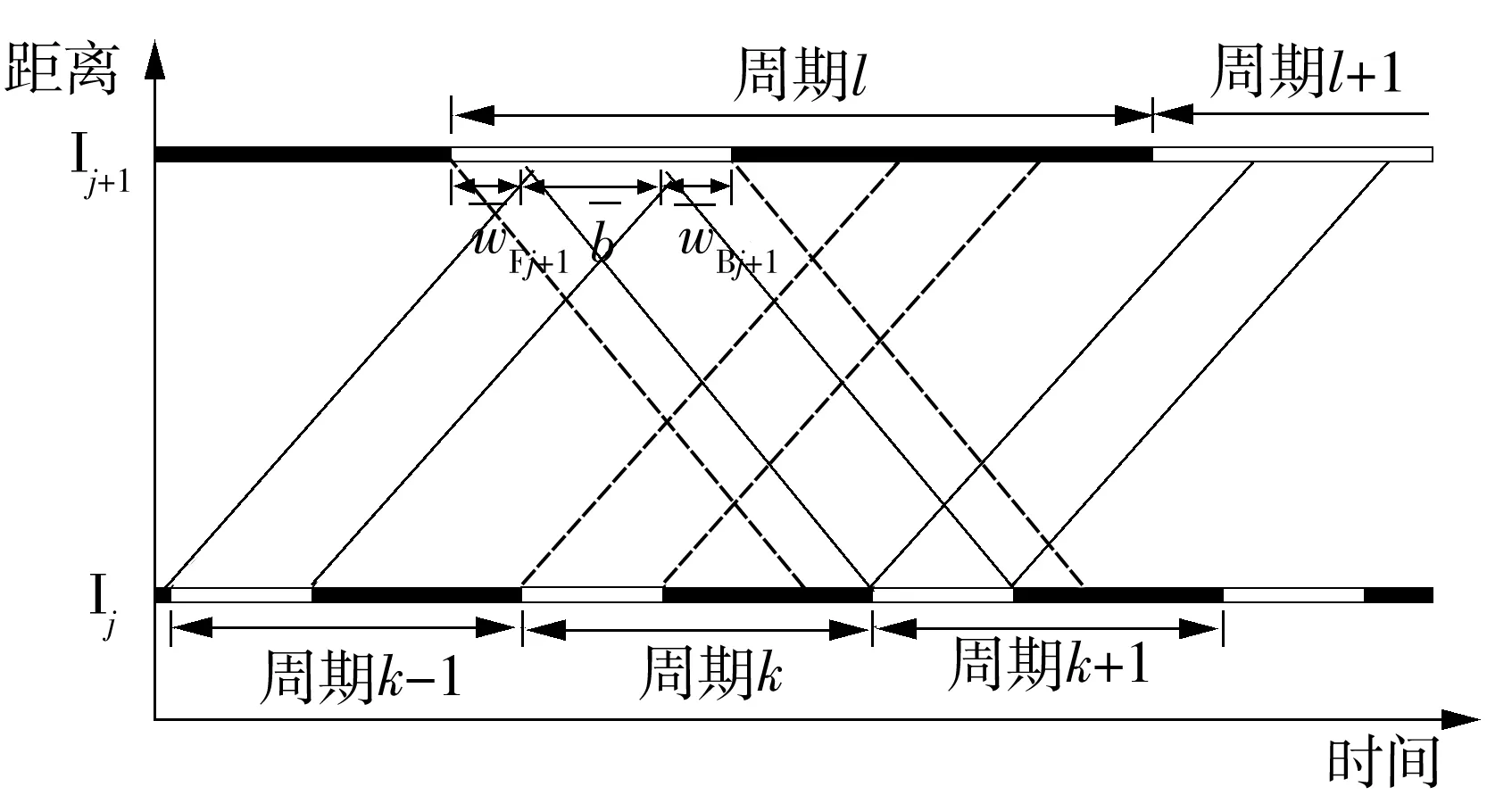
图1 传统双周期绿波协调控制问题分析
Fig.1Problem analysis for traditional double-cycle green wave coordinated control
2 传统双周期绿波协调控制模型
假定某干道上有n个信号控制交叉口,其编号分别为I1,I2,…,In.定义由交叉口I1至交叉口In为干道上行方向,由交叉口In至交叉口I1为干道下行方向.假若交叉口Ij采用双周期,交叉口Ij+1采用公共周期,绘制其干道绿波协调控制时距图,如图2所示.

图2 双周期绿波协调控制时距图
Fig.2Space-time diagram for double-cycle green wave coordinated control

根据图2,可以建立如下双周期干道绿波协调控制模型:

(1)
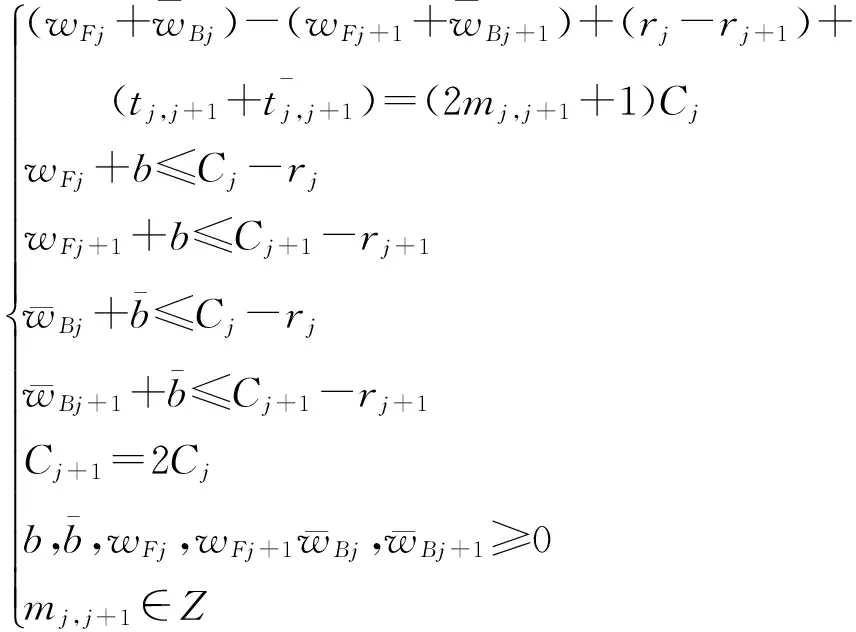
式中:rj(rj+1)表示交叉口Ij(Ij+1)的红灯时间;mj,j+1表示交叉口Ij与交叉口Ij+1的相位差方程式系数,取整数值;Cj(Cj+1)表示交叉口Ij(Ij+1)的信号周期.
3 基于速度引导的双周期绿波协调控制方法
为便于问题分析,做以下假设:①车路协同系统能够获取车辆状态(位置、速度、编号等)与交通信号状态信息(红绿灯时间等);②车辆能够遵守速度引导策略;③不考虑行人与非机动车的干扰.
3.1干道上行方向速度引导方法
对于干道上行方向,车辆由交叉口Ij行驶至交叉口Ij+1时,将周期性地出现“不停车-停车-不停车-停车…”的现象,在此提出以下解决思路:将交叉口Ij周期k绿灯期间放行的车辆分成两部分,一部分进行加速引导,利用交叉口Ij+1周期l的“带宽后富余时间”(wBj+1),使加速车辆不停车地通过下游交叉口Ij+1;另一部分进行减速引导,利用交叉口Ij+1周期l+1的“带宽前富余时间”(wFj+1),使减速车辆不停车地通过下游交叉口Ij+1.定义周期k的上行加速引导速度为va,k,上行减速引导速度为vd,k.上行方向速度引导方法如图3所示.

图3 干道上行方向速度引导示意
3.1.1干道上行加速引导
(1)加速引导速度的理论取值范围
干道上行方向加速引导速度理论取值范围分析如图4所示.

图4 上行加速引导速度理论取值范围
Fig.4Theoretical range of accelerating speed guidance in up direction
由图4可知,加速引导速度va,k的取值应介于速度v1与速度v2之间.速度v1、v2可分别由式(2)、(3)计算得到.
(2)
(3)

综上所述,上行加速引导速度Va,k的理论取值范围为
v2≤va,k≤v1
(4)
(2)加速引导速度的实际取值
为获得更大通行效益,加速引导速度va,k的取值原则为:对交叉口Ij周期k绿灯期间头车进行加速引导,使其行驶至下游交叉口Ij+1的时刻点与交叉口Ij周期k-1绿灯期间尾车行驶至下游交叉口Ij+1的时刻点尽量接近,争取在交叉口Ij+1周期l中有更多的绿灯时间可以分配给加速引导车辆通过.va,k具体取值为
(5)
式中:vmax与vmin分别表示干道上行方向引导速度允许取值的上限与下限;v0表示引导前的上行车速,va,k=v0表示不实施速度引导.
3.1.2干道上行减速引导
(1)减速引导速度的理论取值范围
干道上行方向减速引导速度理论取值范围分析如图5所示.

图5 上行减速引导速度理论取值范围
Fig.5Theoreticalrangeofdeceleratingspeedguidanceinupdirection
由图5可知,减速引导速度vd,k的取值应介于速度v3与速度v4之间.速度v3、v4可分别由式(6)、(7)计算得到:
(6)
(7)

综上所述,上行减速引导速度vd,k的理论取值范围为
v4≤vd,k≤v3
(8)
(2)减速引导速度的实际取值
为获得更大通行效益,减速引导速度vd,k的取值原则为:对于交叉口Ij周期k绿灯期间进行减速引导的头车,使其行驶至下游交叉口Ij+1的时刻点与交叉口Ij周期k+1绿灯期间头车行驶至下游交叉口Ij+1的时刻点尽量拉开,争取在交叉口Ij+1周期l+1中有更多的绿灯时间可以分配给减速引导车辆通过.vd,k具体取值为
(9)
3.2干道下行速度引导方法

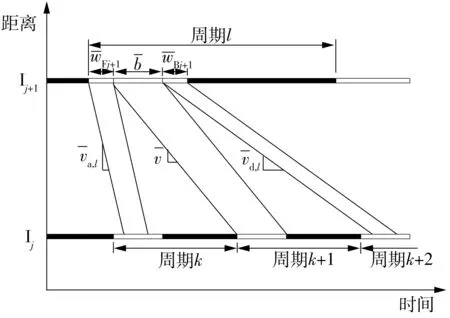
图6 干道下行方向速度引导示意
3.2.1干道下行加速引导
(1)加速引导速度的理论取值范围
干道下行方向加速引导速度理论取值范围分析如图7所示.
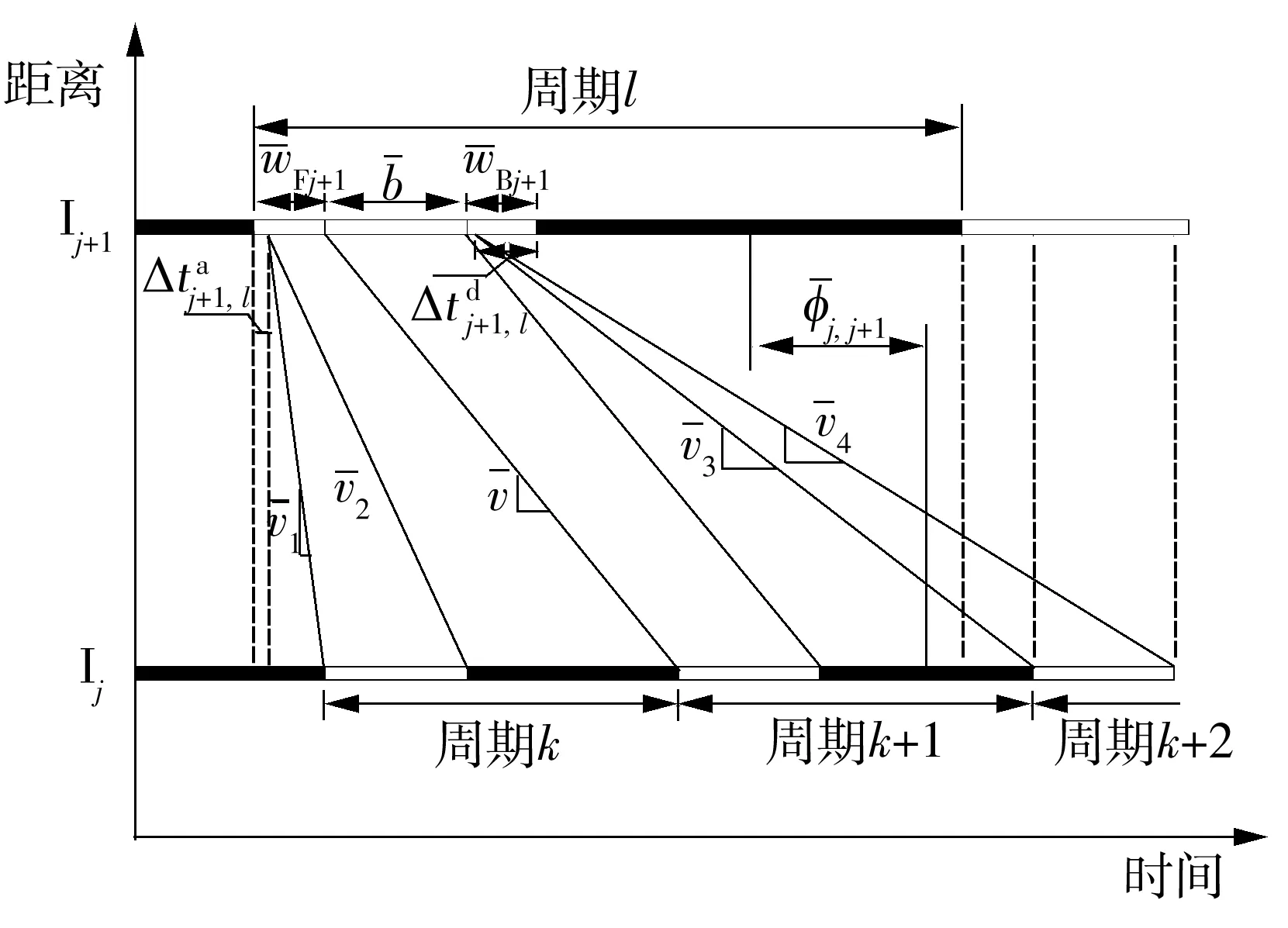
图7 下行方向引导速度理论取值范围
Fig.7Theoretical range of speed guidance for vehicles in down direction
(10)
(11)

(12)
(2)加速引导速度的实际取值
(13)

3.2.2干道下行减速引导
(1)减速引导速度的理论取值范围
采用SPSS16.0和Origin 9.0统计分析软件进行数据分析,所有数值均为三次重复试验所得数值的平均值。
(14)
(15)
(16)
(2)减速引导速度的实际取值
(17)
4 算例分析与仿真验证
4.1算例设计
假设某东西向干道上的相邻交叉口I1采用双周期,交叉口I2采用公共周期.干道绿波带设计速度为10m/s,上行与下行方向引导速度允许取值的下限与上限分别为7m/s与12.5m/s.交叉口I1与交叉口I2的信号配时参数如表1所示.

表1 信号配时参数

表2 协调控制参数
4.2仿真环境设置
4.2.1仿真平台搭建
文中选取VISSIM5.0仿真软件、VISSIM-COM组件以及Visual Studio2012搭建仿真平台.在Visual Studio2012平台中,采用C#语言利用VISSIM-COM提供的GetVehilceByNumber(ID)函数、Vehicle.get_AttValue(“link”)函数以及Vehicle.get_AttValue(“linkcoord”)函数获得车辆编号、路段编号、路段坐标,并利用Vehicle.set_AttValue(“speed”)函数实现对个体车辆的加减速控制.
4.2.2评价参数采集
为对比速度引导前后的通行效果,仿真设置的“行程时间检测区段”将采集10个公共信号周期的仿真数据(行程时间、延误时间、停车次数)进行评价分析.
4.2.3引导速度设置
(1)算例E1:上下行方向加速引导速度的设置
交叉口I1在周期2、4、6、…、20绿灯期间放行的部分车辆可实施加速引导,各周期v1可分别计算为16.90、14.12、14.71、13.70、19.25、15.75、15.04、14.70、13.69、14.56 m/s,各周期v2则固定取值为11.25 m/s.由式(5)可知,交叉口I1在周期2、4、…、20的上行加速引导速度均应取为12.5 m/s.

(2)算例E2:上下行方向减速引导速度的设置
交叉口I1在周期2、4、6、…、20绿灯期间放行的部分车辆可实施减速引导,各周期v3可分别计算为7.15、7.15、7.15、7.15、7.15、7.15、7.15、7.15、7.15、7.14 m/s,各周期v4可分别计算为6.65、6.70、6.60、6.64、6.64、6.66、6.68、6.60、6.66、6.67 m/s.由式(9)可知,交叉口I1在周期2、4、…、20的上行减速引导速度vd,k=v3.

4.3仿真结果分析
4.3.1算例E1
通过仿真实验,得到上下行方向加速引导前后的仿真对比数据,如表3、4所示.
由表3、4可知,加速引导后,平均行程时间、平均延误时间、平均停车次数均显著减少.
4.3.2算例E2
通过仿真实验,得到上下行方向减速引导前后的仿真对比数据,如表5、6所示.
表3上行加速引导前后的仿真结果对比
Table 3Before-and-after simulation results of acceleration guidance in up direction
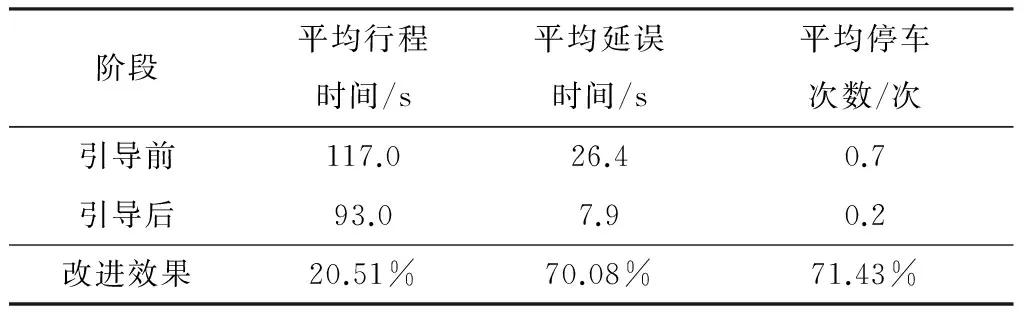
阶段平均行程时间/s平均延误时间/s平均停车次数/次引导前117.026.40.7引导后93.07.90.2改进效果20.51%70.08%71.43%
表4下行加速引导前后的仿真结果对比
Table 4Before-and-after simulation results of acceleration guidance in down direction

阶段平均行程时间/s平均延误时间/s平均停车次数/次引导前110.6018.801.00引导后91.205.800.31改进效果17.54%69.15%69.00%
表5上行减速引导前后的仿真结果对比
Table 5Before-and-after simulation results of deceleration guidance in up direction

阶段平均行程时间/s平均延误时间/s平均停车次数/次引导前116.8017.60.47引导后115.616.500.00改进效果1.03%6.25%100%
表6下行减速引导前后的仿真结果对比
Table 6Before-and-after simulation results of deceleration guidance in down direction

阶段平均行程时间/s平均延误时间/s平均停车次数/次引导前112.9012.800.62引导后112.2012.900.34改进效果0.62%-0.78%45.16%
由表5、6可知,减速引导后,平均行程时间与平均延误时间基本上保持不变,但平均停车次数显著减少.
5 结语
文中分析了传统双周期干道绿波协调控制方法的不足,提出了一种基于加减速引导的双周期绿波协调控制方法,并给出了引导速度的计算方法.文中方法所采用的加速引导策略能够有效降低行程时间、延误时间与停车次数,减速引导策略则能够在不增加行程时间与延误时间的前提下有效降低停车次数.如何将速度引导融入双周期绿波协调模型中,建立一个集成速度引导的协调控制模型,是车路协同环境下交通控制研究的一个新问题.
[1]徐建闽.交通管理与控制 [M].北京:人民交通出版社,2007.
[2]卢顺达,程琳.非对称相位相序方式下的双向绿波协调控制图解法的优化 [J].公路交通科技,2015,32(1):128- 132.
LU Shun-da,CHENG Lin.Optimization of bidirectional green wave coordinated control graphical method under asymmetric phase sequence mode [J].Journal of Highway and Transportation Research and Development,2015,32(1):128- 132.
[3]王殿海,杨希锐,宋现敏.交通信号干线协调控制经典数值计算法的改进 [J].吉林大学学报(工学版)2011,41(1):29- 34.
WANG Dian-hai,YANG Xi-rui,SONG Xian-min.Improvement of classical numerical method for arterial road signal coordinate control [J].Journal of Jinlin University(Engineering and Technology Edition) 2011,41(1):29- 34.
[4]卢凯,刘永洋,吴焕等.非对称通行条件下的双向绿波协调控制数解算法 [J].中国公路学报,2015,28(6):95- 103.
LU Kai,LIU Yong-yang,WU Huan,et al.Algebraic me-thod of bidirectional green wave coordinated control under asymmetric traffic conditions [J].China Journal of Highway and Transportation,2015,28(6):95- 103.
[5]LITTLE J D,MARK C,GARTNER N H,et al.MAXBAND:a versatile program for setting signals on arteries and triangular networks [R].Cambridge:Massachusetts Institute of Technology,1981.
[6]GARTNER N H,ASSMANN S F,LASAGA F,et al.MULTI-BAND-a variable-bandwidth arteries progression scheme [J].Transportation Research Record,1990,1287:212- 222.
[7]ZhANG C,XIE Y C,GARTNER N H,et al.AM-Band:an asymmetric multi-band model for arterial traffic signal coordination [J].Transportation Research Part C,2015,58:515- 531.
[8]ABU-LEBDEH G.Integrated adaptive-signal dynamic-speed control of signalized arteries [J].Journal of Transportation Engineering,2002,128(5):447- 451.
[9]ABU-LEBDEH G,CHEN H.Exploring the potential benefits of IntelliDrive-enabled dynamic speed control in signa-lized networks [C]∥The 89th Annual Meeting of the Transportation Research Board.Washington D C: [s.n.],2010.
[10]YANG Y D,CHEN S Y,SUN J.Modeling and evaluation of speed guidance strategy in VII system [C]∥The 13th Annual Conference on Intelligent Transportation Systems.Madeira Island: [s.n.],2010.
[11]NIU D N,SUN J.Eco-driving versus green wave speed guidance for signalized highway traffic:a multi-vehicle driving simulator study [J].Procedia-Social and Beha-vioral Sciences,2013,96:1079- 1090.
[12]YANG B W,WANG Y Z,HU J M,et al.A traffic efficiency promotion algorithm for urban arterial roads based on speed guidance [C]∥2013 International Conference on Connected Vehicles and Expo,ICCVE 2013-Proceedings.Las Vegas:IEEE Computer Society,2013:869- 873.
[13]CAI B G,ZHENG Z R,GUAN W S,et al.Unsignalized cooperative optimization control method based on vehicle speed guidance and information interaction [C]∥2014 17th IEEE International Conference on Intelligent Transportation Systems,ITSC 2014.Qingdao:Institute of Electrical and Electronics Engineers Inc,2014:57- 62.
[14]张存保,陈超,严新平.基于车路协同的单点信号控制优化方法和模型 [J].武汉理工大学学报,2012,34(10):74- 79.
ZHANG Cun-bao,CHEN Cao,YAN Xin-ping.Traffic signal control method for single intersection based on cooperative vehicle infrastructure system [J].Journal of Wuhan University of Technology,2012,34(10):74- 79.
[15]马万经,吴明敏,韩宝新,等.考虑可变速度节的单点交叉口公交信号优先控制方法 [J].中国公路学报,2013,26(2):127- 133.
MA Wang-jing,WU Ming-min,HAN Bao-xin,et al.Bus signal priority control method for isolated intersection based on dynamic variable speed adjustment [J].China Journal of Highway and Transportation,2013,26(2):127- 133.
[16]吴伟,马万经,杨晓光.车路协同环境下基动态车速的相位差优化模型 [J].控制理论与应用,2014,31(4):419- 524.
WU Wei,MA Wan-jing,YANG Xiao-guang.Dynamic speed-based on signal offset optimization model within vehicle infrastructure integration environment [J].Control Theory & Application,2014,31(4):419- 524.
s: Supported by the National Natural Science Foundation of China(61203164,61174184)and the Science and Technology Planning Project of Guangdong Province(2015A030401024)
Double-Cycle Arterial Green Wave Coordination Control Method Based on Speed Guidance in Vehicle Infrastructure Integration
JINGBin-bin1LUKai1,2†YANXiao-wen1WUHuan1XUJian-min1, 2
(1. School of Civil Engineering and Transportation, South China University of Technology, Guangzhou 510640, Guangdong, China;2. Jiangsu Province Collaborative Innovation Center of Modern Urban Traffic Technologies, Southeast University, Nanjing 210096, Jiangsu, China)
Aiming at the deficiency of the traditional double-cycle arterial green wave coordination control method, a new double-cycle green wave coordination control model is constructed for arterial signals. In the environment of vehicle-vehicle and vehicle-road communication, a double-cycle green wave coordination control method is proposed based on the speed guidance. Moreover, the passing effects before and after the acceleration and deceleration gui-dance are compared by cases. Simulated results shows that the acceleration guidance can effectively reduce the ave-rage travel time, delay and stops, and that the deceleration guidance can effectively reduce the average stops without increasing the average travel time and delay.
traffic control; vehicle infrastructure integration; speed guidance; double-cycle; green wave coordination
2015- 11- 12
国家自然科学基金资助项目(61203164,61174184);广东省科技计划项目(2015A030401024);广州市南沙区科技计划项目(2014MS11);华南理工大学中央高校基本科研业务费专项资金资助项目(2015ZZ073)
荆彬彬(1989-),男,博士生,主要从事交通信号控制技术研究.E-mail:jingbin19@126.com
卢凯(1979-),男,副教授,主要从事交通控制技术研究.E-mail:kailu@scut.edu.cn
1000- 565X(2016)08- 0147- 08
U491.5+4
A
10.3969/j.issn.1000-565X.2016.08.021
