态势与威胁估计:理论概览和基于本体的方法
2016-10-31黄红兵李贤玉王晖向刚
黄红兵 李贤玉 王晖 向刚
信息条件下的现代战争,战场信息量大,战场态势错综复杂、瞬息万变,指挥人员需要在高度的不确定性和时间压力下,及时、准确地判断情况,并对面临的威胁进行有效估计,进而作出正确决策.同时,一体化联合作战条件下,各级各类指挥人员对态势和威胁需要有相对一致的理解和判断,才能贯彻作战意图,实现作战自同步[1].这些现实情况就决定了自动化的、基于共享知识的态势与威胁估计,是现代战争指挥控制必不可少的支持工具.
态势和威胁估计是作战筹划的重要内容,是指挥决策的先决条件,也是高层级信息融合(High Level Information Fusion)[2−3]研究中最主要的内容.本文在回顾态势与威胁的含义与理论的基础上,通过总结已有的理论研究,深入分析了态势与威胁估计的任务和关键,并以本体作为共享知识的表示形式,概述了态势与威胁估计的本体化建模和系统的构建问题,最后对研究作了总结和展望.
1 态势与威胁的含义与理论
在作战领域,“态势”和“威胁”是两个使用频率极高的词汇,但是当要确切给出它们的含义或认真思考有关它们的理论的时候,有时却常常语焉不详,这不利于态势与威胁估计的理论探索和系统实践.
1.1 态势的理论与逻辑
关于态势的理论与逻辑,公认的开创性工作是20世纪80年代由Barwise和Perry完成的,最早主要体现在《情境与态度》(Situations and Attitudes)[4]一书中.尔后,Devlin对此进行了修正和完善[5].
在态势理论(或情境理论,Situation Theory)中,事件和片段(Events and Episodes)是时间中的态势;情景(Scenes)是视觉上感知的态势;变化(Changes)是态势序列;而事实(Facts)则是语言澄清或歪曲了的态势.也就是说,“态势”在态势理论中处于中心地位,成为描述世界的核心概念.态势理论实际上为后来一些研究者给出的态势估计概念提供了理论方法,即认为“态势估计是一种关于世界的理解;在此,态势被表达为关于局部世界的陈述的集合”[6].
态势逻辑为态势理论提供了一种形式化方法,其基本组成是信息子(Infon),即一条关于世界的陈述信息.信息子具有如下形式:

其中,r是n元关系;x1,···,xn是适合于关系r的实体;l是位置;t是时间;p是信息子的极性,p∈{0,1}.在一些研究中,为了表达信息的不确定性,也将信息子的极性的取值变为p∈[0,1].
信息子不是从其自身可以判断正确或错误的事物,而是关于一个态势可能正确或错误的特殊信息项.给定态势s和信息子σ,用二元关系“支持”(supports,用符号“|=”表示)将它们联系起来,即用符号
表示态势s使信息子σ成为事实,简称“s支持σ”.
信息子还可以通过合取、析取以及存在和全称量词,以递归的形式形成复合信息子(Compound Infons).复合信息子的定义可以通过信息子逻辑(Infon Logic)给出.例如,信息子σ和τ的合取σ∧τ的形式化定义表示如下:

关于态势逻辑的详细介绍超出本文范围,其完整论述参见文献[5].
虽然在实际态势估计系统的设计开发中,并不涉及关于态势的理论与逻辑研究,但是考察这些研究对澄清态势概念非常有帮助,可以知道态势估计的关键是把握实体之间的关系,进而从理论上梳理态势估计的思路.
1.2 威胁的含义与模型
当人们说起“威胁”时,通常有下面几个不同层面的含义[7]:
1)威胁行为(Threat acts):对“我们”的利益不利的行为;
2)威胁主体(Threat agents):可能会采取威胁行为的个体或组织;
3)威胁事件(Threat events):对“我们”来说可能会产生不利后果的事件,包含有意图(如攻击)或无意图(如自然灾害、人为失误等)两种;
4)危险主体(Threatening agents):在未来某个时间可能会采取威胁行为的个体或组织;
5)危险态势(Threatening situations):包含危险主体和行为的态势;
6)濒临威胁的行为(Threatened acts):在未来可能会被执行的威胁行为(或行动);
7)濒临威胁的态势(Threatened situations):随濒临威胁的行为产生的态势;
从威胁的内涵结构上,Little和Rogova[7]认为“威胁”概念中存在3个相互关联的要素:
1)意图(Intentions):想要实现的目标或计划,表达的是威胁的心理成分,并且常常会受能力和机会的深度影响;
2)能力(Capabilities):施加破坏、损伤的可能力量,体现在作战实体的种类、属性及其行为上,表达的是威胁的实力成分;
3)机会(Opportunities):与实施威胁相关的条件的状态,特别是时间和空间上的条件状态,例如目标进入火力范围、靠近某人或设施、知悉对方计划、对方弱点的暴露等.机会让具有充分能力的个体或组织能够实现自己的意图,是威胁的现实可能成分.
威胁的“意图-能力-机会”模型揭示了威胁涉及的核心要素,
区分这些概念和内涵可以更详细具体地界定威胁估计所要处理的问题.
2 态势与威胁估计的任务和关键
对于态势与威胁估计,讨论得最多也最充分的是信息融合领域.态势与威胁估计的任务通常由信息融合模型来界定.
2.1 信息融合模型中的态势与威胁估计
自美国国防部实验室联合理事会(Joint Directors of Laboratories,JDL)1987年建立起第一个通用信息融合模型—JDL模型以来,信息融合领域开发了很多融合模型[8−10].从这些模型采取的视角来看,可以分为:机器处理的视角、人类认知的视角、用户参与的视角、OODA的视角和综合的视角.这些不同视角强调了信息融合的不同方面,对于信息融合的研究内容和信息融合系统的构建都产生很大影响,同时也从不同角度规定了态势与威胁估计的内容.
2.1.1 机器处理的视角
机器处理视角下的融合模型以JDL模型为代表,态势估计和威胁估计分别位于模型的第2级和第3级,这也是态势与威胁估计概念的来源,如图1所示.
在JDL模型及其后一些续修订版本中[11−13],态势和威胁估计的含义大体一致,表述如下:
态势估计指的是在实体估计的基础上,对战场环境中的实体/事件之间的关系进行分析、估计和描述,包括兵力结构、作战单元之间的关系、参与通信的网络及它们之间的依赖关系,等等,是对现实构成的结构的估计和判断.
威胁估计指的是在态势估计的基础上,将当前态势外推到将来,预测未来一段时间内可能发生的事件、可能面临的威胁、敌我双方的弱点及作战的机会等,评估可能行动的效益或损失.
JDL模型中对态势和威胁估计的界定,虽然在表述上带有意识和认知的字眼,但是完全是在机器处理的语境下给出的,基于这一模型的态势和威胁估计研究也主要以机器自动处理为主.
2.1.2 人类认知的视角
人类认知视角下的模型以Endsley的态势感知模型[14−15]为代表,如图2所示.
Endsley的态势感知模型包含两大部分,即态势感知核心模型和影响态势感知的各种因素.态势感知核心模型将态势感知分成三级心智表达(Metal Representation):1)感知(Perception),即感知获取环境中有关元素的状态、属性和活动等;2)理解(Comprehension),即对感知到的分离元素的信息进行组装、综合和阐释,形成对当前态势有组织的表达;3)预测(Projection),即根据当前状态和其他条件,推断态势变化,预测未来事件.

图1 JDL多传感器融合模型中的态势感知和威胁估计

图2 Endsley的态势感知模型
Endsley的态势感知模型不是在信息融合背景下提出的,严格来说也不是一个信息融合模型,而是一个人因工程(Human Factor Engineering)背景下的人类对环境感知的心智模型(Mental Model).虽然如此,由于该模型对态势感知的深刻洞察,它对信息融合领域—特别是其中的态势估计—的研究产生了很大的影响,许多工作就是基于这一模型来做的[16−18].
Endsley的态势感知模型之所以被信息融合领域所重视,一个重要的原因是态势感知模型与JDL模型有着天然的联系.基于状态转换数据融合模型(State Transition Data Fusion,STDF)[19],人们给出了这两种模型的层级之间的对应关系[3],如图3所示.
从图3给出的态势感知模型与JDL模型各层级之间的对应关系中,可以看出态势感知核心模型对应了JDL模型中的第1、2、3级,只不过它们分别对应于机器功能角度和认知功能角度.另外,图3中的这种联系也是用户参与视角提出的基础.
2.1.3 用户参与的视角
用户参与视角下的信息融合模型以JDL用户(User-JDL)模型[20]和DFIG(Data Fusion Information Group)模型[21]为代表,如图4和图5所示.这两个模型都认识到信息融合实践中用户参与的重要性,是对JDL模型进行的修正.
User-JDL模型关注并描述了用户与融合系统之间的交互活动,强调信息融合过程中人对各级机器融合信息的修正、判断和选择,使融合信息质量和应用效能得以提升.具体到态势与威胁估计,User-JDL模型中用户:1)向态势估计提供这一过程所需要的上下文知识,解决机器中相关背景知识不足或自动态势判断错误的问题;2)向威胁估计提供意图信息,将己方作战意图或判断对手意图提供给融合系统,修正系统自动产生意图估计的不足或错误.
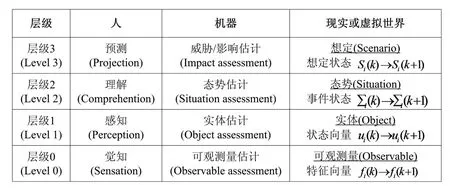
图3 态势感知模型与JDL模型各层级之间的对应关系

图4 User-JDL模型中的态势感知和威胁估计

图5 DFIG模型中的态势感知和威胁估计

图6 Omnibus模型
DFIG模型的主要目的是将融合功能与管理功能区分开来,充分发挥人在信息融合中的作用,通过传感器控制、平台部署、用户选择等管理手段,实现资源与过程优化,以满足任务目标.具体到态势与威胁估计,DFIG模型认为人在这两个融合过程中发挥主导作用,不同于第1级目标估计可以通过机器显式表达,态势与威胁估计是一种隐式融合过程,因为这一过程中用户的知识和推理以及理解与分析都必不可少.
2.1.4 OODA的视角
OODA(Observe-Orient-Decide-Act)循环是指挥控制和作战过程分析中的通用模型,在JDL模型和Endsley的模型中都存在OODA的影子,但是都没有明确声明.明确表示结合了OODA循环的融合模型的代表是Omnibus模型[22],如图6所示.Omnibus模型对低层融合描述的比较多,而对态势与威胁估计研究的意义不是很大.文献[10]对其进行了进一步的细化,将态势估计和威胁估计分别放到了判断和决策阶段,如图7.
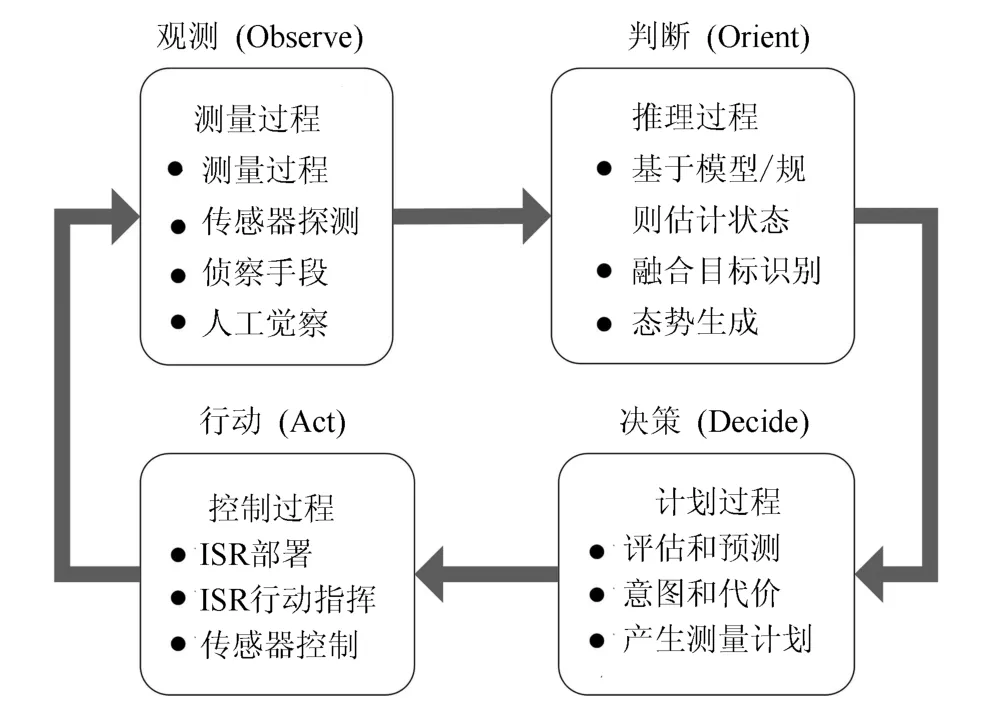
图7 文献[10]阐述的感知活动OODA内涵
2.1.5 综合的视角
综合视角下的信息融合模型[23]如图8所示,它是综合了以上视角对JDL模型的扩展.具体到态势与威胁估计,它既强调了人的心智模型,也强调了用户参与的人机过程,同时还强调了机器自动处理的支持作用.
2.2 态势与威胁估计的关键问题
在军事信息系统自动化、智能化的发展趋势和背景下,综合上一小节给出的不同视角下的融合模型,可以认为:态势与威胁估计是一个以实体估计为基本输入,在用户参与下融合了人的知识和意图,以关系分析和损失/效益分析为主要任务,通过智能化的机器支持而实现的一个相对自动化的估计过程.态势与威胁估计的任务和作用可以概略地总结如表1.
综合考虑态势与威胁估计的任务和作用,存在这样几个关键问题:1)态势与威胁估计过程中,需要哪些数据信息和过程知识?从哪里得到?该怎样组织?2)具体地,态势与威胁估计中一般存在哪些功能过程?3)态势与威胁估计的级间作用通常有哪些?怎样理解和处理?
2.2.1 态势与威胁估计的信息资源极其组织与处理
从性质上看,态势与威胁估计的信息资源可以分为两大类,即事实信息和过程知识.事实信息包括:1)第1级实体估计产生的关于实体/事件的信息;2)关于态势和关系的知识;3)关于敌方意图和行动计划的假设或想定;4)我方意图或行动计划.
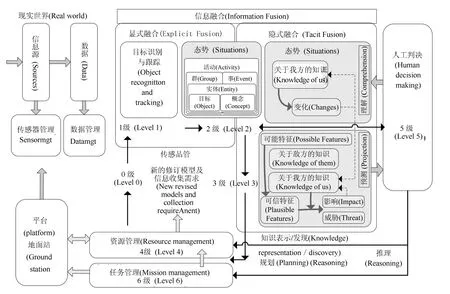
图8 信息融合综合模型

?
过程知识包括:1)怎样将显性事实与隐性事实关联起来,形成合理的推论或假设,即关于关联的过程知识;2)怎样对推论或假设进行估价,给出相应的置信度,即关于估计的过程知识.
从前面给出的信息融合模型可以看出,除了测量信息都是来源于机器外,其他信息资源都有可能来源于两方面,即人和机器.所以对于态势与威胁估计的信息资源,其来源均可能在机器或在人.从自动化和智能化的趋势和要求看,将人所掌握的态势与威胁估计方面的知识,通过各种途径在机器中表达出来,是非常关键和必要的.
从知识表达的角度看,目前的态势与威胁估计系统,主要采取的是基于数据和特殊业务过程来实现的,如图9所示.态势与威胁估计的事实信息资源在系统内主要以数据的形式存在,过程知识在系统内主要以特定的业务过程的形式存在.通常人也作为信息的拥有者和加工处理者,通过人机接口参与到态势与威胁估计过程.
这种信息组织处理方式中,数据与业务过程相对来说耦合得比较紧,数据的语义和语用都在业务过程中体现,不管是数据的格式还是意义变了,态势与威胁估计的业务过程都需要跟着修改.这种方式的好处是态势与威胁估计业务过程的设计相对比较灵活,可以充分挖掘隐含在数据中的信息.
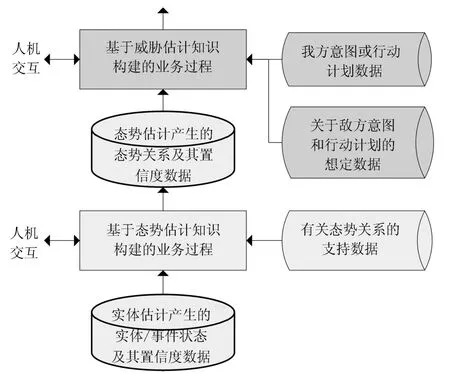
图9 基于数据和特殊业务过程的组织和处理方式
另一种是基于知识和通用逻辑推理的方式来组织和处理信息,如图10所示.目前,也有一些系统使用这种方式,如SAWA[24]、PROGNOS[25]等.此种方式中,态势与威胁估计的事实信息资源在系统内主要以知识的形式存在,过程知识在系统内表现为两种:1)基于逻辑的通用推理过程;2)基于问题查询的业务过程.通用推理过程是基于信息资源的知识表示方式,通过基于一般逻辑的推理引擎而实现的知识推理过程;这一过程主要利用了知识表示所具有的严格语义,以一般化的方式从显式知识推导隐式知识.业务过程则就关心的问题或需要的信息,通过生成知识查询语句,利用通用推理过程,从相关知识库中获取知识.

图10 基于知识和通用逻辑推理的组织和处理方式
这种信息组织处理方式中,知识与业务过程相对来说耦合得比较松,知识的语义由知识表示方式确定,业务过程不需要对知识数据作特别的处理.这种方式的缺点是知识推理受制于知识表示的能力,特别是表达能力和推理能力,可能难以充分挖掘隐含在数据中的信息.
很自然地可以想到综合以上两种信息组织和处理方式,但是多种信息组织和表达方式并存也带来很多问题:1)信息维护任务比单一组织和表达方式更重;2)业务应用的管理更复杂.
2.2.2 态势与威胁估计中的功能过程
态势与威胁估计涉及以下功能过程:
1)关系界定与建立
无论是态势还是威胁,都体现在实体/事件之间或它们与环境(也可以看成特殊的实体)之间的关系上,要把握和描述态势与威胁必需从关系入手.所以,态势与威胁估计最基本的实质上是关系估计,首要的工作是关系的建立.
考虑一个仅有10个实体的场景,即使仅考虑二元关系,它们之间也有10*10=100种关系,而由这些关系产生的关系集合可以达到2100个.实际上,通常只有相对较少的关系与关心的问题相关,那么选择什么样的关系集合作为态势与威胁估计的基础?对于这一问题,通常有两种路径:1)由用户和系统设计开发人员选取问题相关的关系,并通过编码实现对关系的估计;2)系统通过访问领域知识,分析关系之间的依赖,进而选取能够导向用户问题相关关系的关系,然后进行进一步的处理.
2)态势觉察与分析
态势觉察与分析是基于收到的数据(主要是实体估计结果),检测和关联相关关系的显著特征,估计和判断实体之间的关系以及它们对于相关实体状态的意义.
态势觉察与分析可以形式化地表示为以下功能过程:
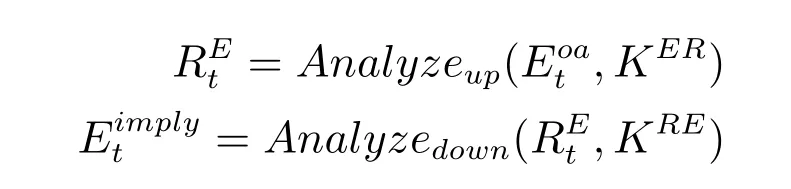
其中,是时刻t时实体估计的结果,即战场实体在t时刻的位置、状态、身份等属性信息及其置信度;KER是关于关系的知识,是从实体特征到关系的知识;是基于和KER,判断和估计出的时刻t时实体之间的关系以及它们的置信度,Analyzeup是这一判断估计过程;KRE是关系的知识,是从关系到实体状态的知识;是基于和KRE,推理和估计出的相关实体状态及其置信度,Analyzedown是这一推理估计过程.
3)态势理解与识别
态势理解与识别是基于实体信息和实体关系分析结果,利用态势及其分类的知识,形成对当前态势的类型识别,用于判断敌方战场部署和行动企图,是对敌方意图和作战计划的识别.
态势理解与识别可以形式化地表示为以下功能过程:

其中,Et是时刻t时战场实体的位置、状态、身份等属性信息及其置信度;Rt是时刻t时战场实体之间的关系以及它们的置信度;KS是关于态势及其分类的知识;St基于Et和Rt以及KS,判断和估计出的时刻t时的态势类别及其置信度;Intp是态势理解与识别过程.
4)态势/事件前瞻
态势/事件前瞻是基于已得出的当前态势,利用关于态势实体和关系的状态变化规律的知识,对未来可能出现的态势/事件进行预测.
态势/事件前瞻可以形式化地表示为以下功能过程:

其中,Et和Et0分别是当前时刻t和未来时刻t0战场实体的位置、状态、身份等属性信息及其置信度;Rt和Rt0分别是当前时刻t和未来时刻t0战场实体间的关系及其置信度;St和St0分别是当前时刻t和未来时刻t0的战场态势及其置信度;KD是关于态势实体和关系的状态变化规律的知识;Proj是态势/事件前瞻过程.
对应于不同的级别,既可以是对单个战场实体未来状态的预测,也可以是对敌方各个级别作战单位未来状态和它们之间关系变化的预测,还可以是对高层全局态势演变的预测(如由攻击状态变为防御状态).
5)对抗/博弈预测
对抗/博弈预测是基于当前态势和对敌作战意图及计划的判断,在给定我方意图和作战计划以及敌应对方案等想定的基础上,利用军事对抗/博弈的知识或规则,对未来可能出现的态势和事件进行预测.
对抗/博弈预测可以形式化地表示为以下功能过程:

其中,St和分别是当前时刻t和未来时刻t0的战场态势及其置信度;Pthem和Pus分别是敌方和我方的意图及计划,KG是军事对抗/博弈的知识或规则;Game是对抗/博弈预测过程.
对抗/博弈预测一种更高层级的预测,是对未来高级行为的估计,需要用到敌我双方的军事条令条例与相关知识;在技术手段上,通常需要用到作战仿真、兵棋推演等技术.
6)损失/效益评估
损失/效益评估是基于对抗/博弈预测的结果,利用相关评价指标和评估分析技术,计算评估军事对抗过程中的损失或效益.
这些过程中,3)、4)、5)在实际过程实现上一般都涉及假设生成、假设评估、假设选择的迭代过程,如图11所示.

图11 估计过程中假设的生成、评估、选择及其迭代过程
另外,这些过程中的数据多是以不确定性处理方法获得的.典型的不确定性处理方法有主观贝叶斯方法、模糊集合理论、D-S证据理论等.
2.2.3 态势与威胁估计的级间作用
态势与威胁估计的对上、对下作用,在图12所示的信息融合跨层级功能交互中[8],有一定的体现.简单地说,对上的作用是为上一层级的估计过程提供基础信息;对下的作用是为下一层级的估计过程提供上下文信息.

图12 信息融合跨层级功能交互[8]
在态势与威胁估计的可能性和置信度计算过程中,常常涉及的级间推理包括:
(1)一级到二级的演绎推理(L1→L2 Deduction).以贝叶斯形式可以表示为:

其中,R(x1,···,xm) 为x1,···,xm之间的关系,Ei(xi)为xi的实体估计结果,s为态势上下文.
(2)一级到二级的归纳推理(L1→L2 Induction).以贝叶斯形式可以表示为:

(3)二级到一级的演绎推理(L2→L1 Deduction).以贝叶斯形式可以表示为:

(4)二级到三级的演绎推理(L2→L3 Deduction).以贝叶斯形式可以表示为:

其中,T(r1,···,rn) 为关系r1,···,rn中存在的威胁,R(ri)为关系ri的估计结果,s为态势上下文.
(5)三级到二级的演绎推理(L3→L2 Deduction).以贝叶斯形式可以表示为:

在实际的系统设计开发中,态势与威胁估计的级间作用通常隐含在在它们的功能过程中,常常并不明确提出来.但是从实践看,明确它们的级间作用,可以理清系统的设计实现思路.
3 态势与威胁估计的本体化建模
态势与威胁估计的本体化建模,就是以本体技术为工具,对态势与威胁估计的相关知识进行建模,通过知识表示和知识推理的方法进行态势与威胁估计.按照文献[26]的论述,本体不仅作为一种知识表示形式,还作为一种知识共享的方法,服务于系统互操作.
3.1 态势与威胁估计的知识体系
按照一般作战知识的层次结构[26],态势与威胁估计的知识体系如图13所示,总体上分为3个层次:关于作战系统自身的知识、关于作战活动的知识、关于态势和威胁及其推理的知识.关于作战系统自身的知识和关于作战活动的知识,见文献[26]的讨论.关于态势和威胁及其推理的知识,主要包括:1)关于态势关系和态势分类的知识;2)从作战要素状态和作战活动推导态势状态及其置信度的知识;3)关于威胁三要素—意图、能力和机会—的知识;4)从要素状态、作战活动和态势估计结果推断威胁类型及其程度的知识.
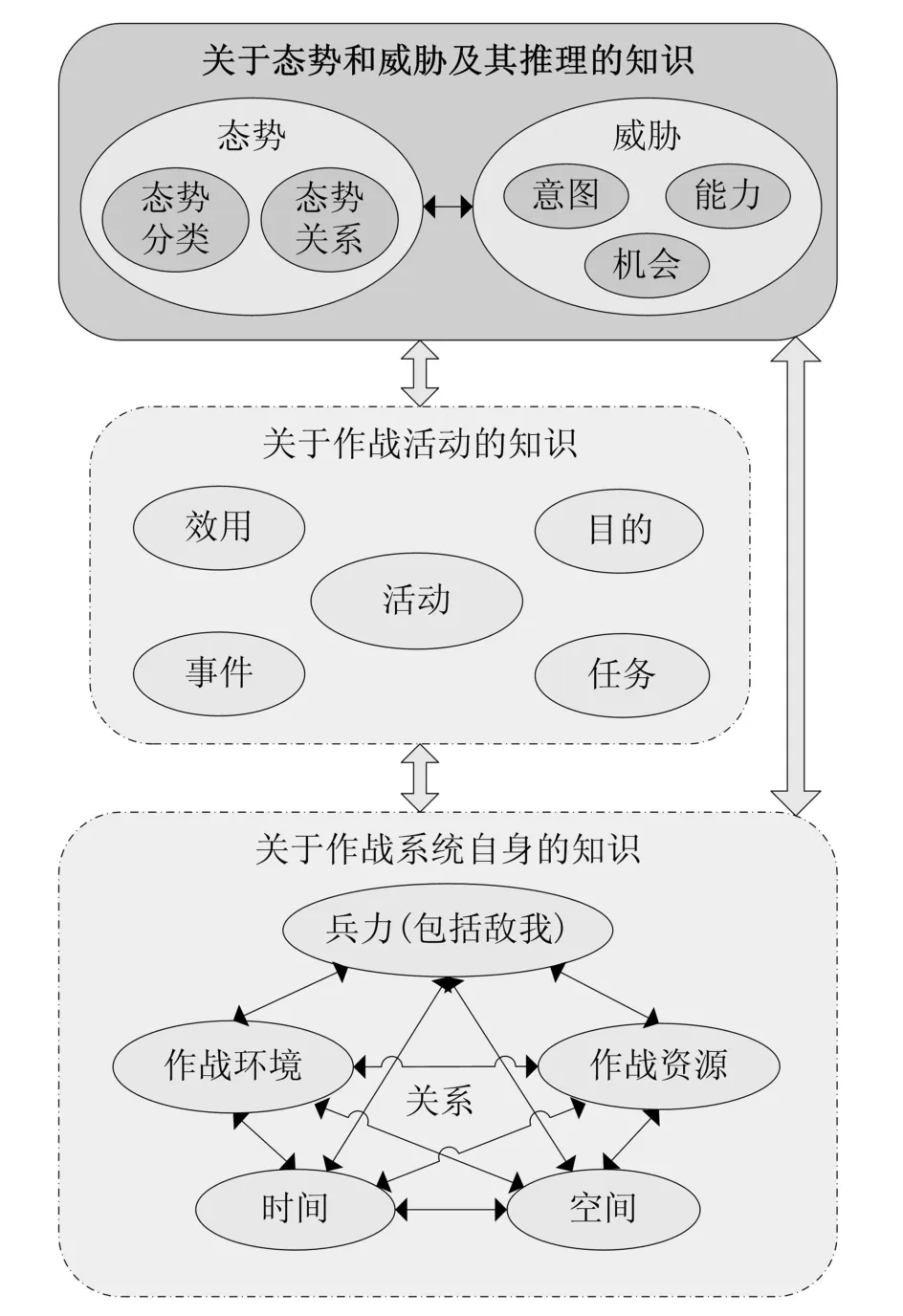
图13 态势与威胁估计的知识体系
所以,态势与威胁估计的本体化建模主要包括两类:1)态势和威胁的概念本体建模;2)态势和威胁的推理知识建模.
3.2 态势与威胁估计的概念本体建模
按照文献[26]给出的作战知识本体化建模方法,态势与威胁估计的概念本体建模中,关于作战系统自身的知识和关于作战活动的知识所涉及的概念,可以利用相关领域的本体建模成果,集成进态势与威胁估计的本体模型.因而,态势与威胁估计概念本体建模的主要工作,集中在对态势关系区分、态势分类、威胁分类、意图鉴别等方面.
“关系”在作战知识的本体模型中扮演着非常重要的角色,特别是态势与威胁估计基本都是建立在作战实体之间的关系、敌我之间的关系、事件之间的关系等各种关系之上.一些文献就专门探讨了“关系”的分类体系,并利用这些关系进行事物的本体描述[27−28].在态势与威胁估计中,作战活动的时间配合模式和空间配合模式,是确定态势和威胁的类型或状态基本依据.因而,在这些关系中最基本的是时间关系和空间关系.许多研究就是基于这些认识展开的.
在基于本体的态势感知研究中,较为突出的本体—SAW 核心本体[29],就是以“关系”为核心概念建立起来的,如图14所示.而在以提高操作员态势感知为目的的本体驱动框架BeAware![30]中,也是从时间关系和空间关系,对SAW 核心本体进行了扩展,如图15所示.

图14 SAW核心本体
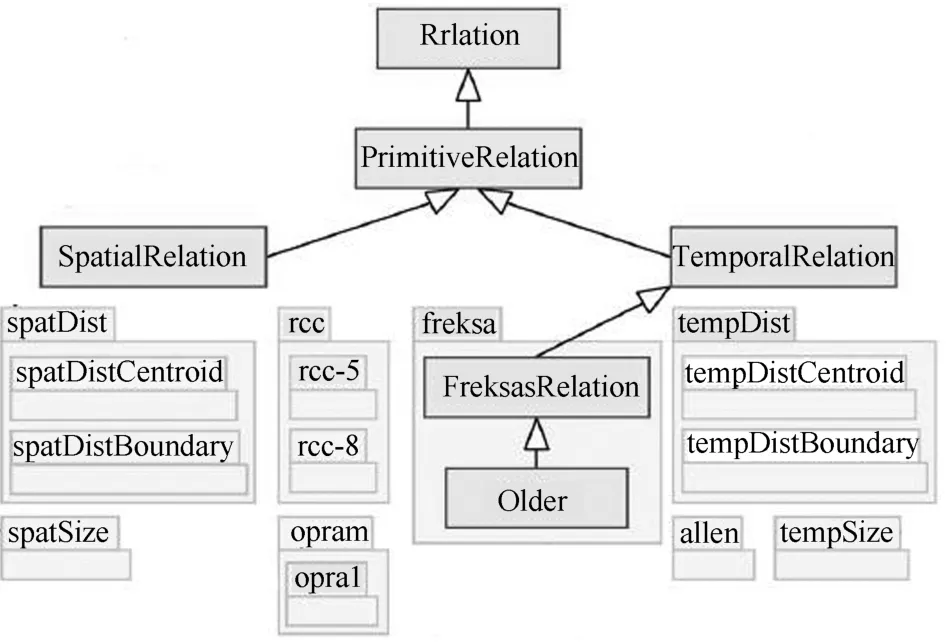
图15 BeAware!中通过时空关系对SAW核心本体的扩展
另外还存在一些其他态势与威胁估计概念本体建模方法.文献[16]给出的STO(Situation Theory Ontology)本体,是以Endsley的态势感知理论建立起来的.文献[31]则是从作战数据模型JC3IEDM中抽取相关本体,并与SAW核心本体进行集成,来生成C4ISR高层信息融合的态势感知概念本体.
3.3 态势与威胁估计的推理知识建模
态势与威胁估计涉及的主要是不确定性推理[8,32,33],也就是基于已经获得的信息,通过相关知识,推断所处的态势和面临的威胁,并且估计相应的置信度.
对于不确定,文献[34−35]对其进行了分类,这对于甄别和评价态势与威胁估计所涉及的不确定性推理有很大帮助.
由于前述态势与威胁估计的功能过程和级间作用,贝叶斯网络成为其所涉及的不确定性推理的主要方法,许多工作就是基于这一方法展开的[18,36−38].
其实,许多不同的不确定推理模型是贝叶斯网的特例[39,40],如马尔科夫链、隐马尔科夫模型、卡尔曼滤波、粒子滤波等.正因为贝叶斯网的一般性,才使其成为态势与威胁估计的主流方法.文献[36]还以贝叶斯网络框架,对主观贝叶斯方法、模糊集合理论、D-S证据理论等3种不确定性推理方法,进行了统一表示.
对于能够以贝叶斯网表达的推理知识的建模,可以通过概率网络本体语言(Probabilistic Web Ontology Language,PR-OWL)来进行.这在笔者在前期工作的论述中(文献[26])已经提及.一些工作正是以此为基础的[25,41−43].
3.4 基于本体的态势与威胁估计系统的构建
依据文献[26]给出的作战知识应用框架,基于本体的态势与威胁估计系统的构建,可以按照图16所示的框架来进行.
其中,知识获取层包括基于本体的实例知识获取模块和基于数学模型的知识发现与获取模块,主要是因为基于本体的方法不能代替其他分析,而通过相关数学模型的底层数据分析可以获得并生成高层本体知识.由于知识推理通常非常耗资源,可以利用云计算技术加速对大规模知识的推理[44−45].另外,模式知识相对变化较小,属于静态知识,而根据动态态势数据生成的实例知识,相对变化较快,因而可以采用动态知识与静态知识分离的策略,以便于知识的组织、管理和使用.
4 结论与展望
态势和威胁估计,在理论上是高层级信息融合研究中最主要的内容,在军事实践中是作战筹划的重要内容,同时也是指挥决策的先决条件.本文首先回顾了态势的理论与逻辑及威胁的含义与模型,这些理论对于澄清态势与威胁的含义,发展态势与威胁估计理论与方法,提供了基本依据;然后通过总结已有的理论研究,回顾了信息融合模型中的态势与威胁估计,全面深入分析了态势与威胁估计的任务和关键,指出了态势与威胁估计是一个以实体估计为基本输入,在用户参与下融合了人的知识和意图,以关系分析和损失/效益分析为主要任务,通过智能化的机器支持而实现的一个相对自动化的估计过程;进而,以本体作为共享知识的表示形式,概述了态势与威胁估计的本体化建模和系统的构建问题.

图16 基于本体的态势与威胁估计系统的构建框架
虽然基于本体的态势与威胁估计是非常值得重视的方法,但也存在一些需要解决的关键问题,如本体语言的表达能力、知识获取的手段和大规模知识推理的效率问题,等等.其解决途径包括知识获取工程化、基于云计算的大规模逻辑知识推理,等等,
另外,贝叶斯网作为态势与威胁估计中的主要推理方法,也存在推理的精度和效率的问题,因为精确的贝叶斯推理是一个NP难问题[46],因而开发有效的贝叶斯推理算法一直是亟待解决的问题.贝叶斯编程(Bayesian Programming)[39]是其中值得关注的解决方法.
总之,态势与威胁估计通常涉及非常复杂的理论和技术问题,在联合体制下,将现有技术整合进一个统一框架,以实现系统之间的互操作、互理解和互遵循,是非常有意义的工作.
