武装直升机拦截反辐射无人机过程建模及效能评估
2016-10-31姜林徐鸿羽
姜林 徐鸿羽
反辐射武器的存在对防空雷达的生存构成了严重威胁,尤其是反辐射无人机这种具有长时滞空压制能力,可集群出动的反辐射武器更是给指挥员造成了巨大的心理负担[1].因此,如何抗击反辐射无人机成为军事人员及学者普遍关注的问题.突防是反辐射无人机作战的关键环节,也是其毁伤压制防空雷达的前提,在此环节对其进行火力拦截将是一种可行方法.文献[2-4]对地空导弹和高炮拦截反辐射无人机已作了较多研究,文献[5−6]提到武装直升机拦截反辐射无人机的方法经试验验证是可行的,但未进行深入论述,关于这方面定量研究的文章也很鲜见.反辐射无人机具有“发射后不管”的特点,突防阶段按预设航路飞行,航路固定,机动性不强,因此,引导武装直升机提前进入阵位对反辐射无人机实施拦截,不仅使拦截前移,而且能在一定程度上削弱反辐射无人机作战效能、降低其对防空系统的威胁.所以对武装直升机拦截反辐射无人机的过程及效能进行研究具有现实意义.
1 武装直升机对空拦截过程及空域约束
1.1 对空拦截过程
武装直升机对空拦截过程包含4个基本环节[7],引导飞行、搜索跟踪和火力攻击以及拦截任务分配,其中火力攻击又包含两种典型方式[8]:超视距导弹攻击和近距航炮攻击.流程如图1所示.
1.2 拦截空域约束模型
武装直升机遂行空中拦截任务的空间范围有一定限度,这个空间范围可用截击地段表示.截击地段可定义为截击单批空中目标时,从预计投入攻击时刻起到退出攻击时刻止,目标飞行的直线距离[9].截击地段可通过计算需要截击地段和可用截击地段来确定.
1)需要截击地段.是指引导直升机完成对一批空中目标的一次截击任务所需要的地段.其表达式可写为

图1 武装直升机拦截目标流程图
式中,前半部分为经验公式,表示由引导产生的误差地段;后半部分为采用导弹和航炮混合攻击方式时的攻击地段计算公式.Vobj为空中目标的飞行速度(km/h);sfind、sexit、socc分别为直升机发现目标、退出导弹攻击和使用航炮攻击时距目标的距离;∆v1、∆v2分别为直升机从目标尾部进入接敌和导弹攻击后加速追赶时与目标的速度差;tatt、tocc分别表示使用航炮攻击时的一次进攻和一次占位时间;n为航炮攻击次数.
2)可用截击地段[10].是指直升机能够对空中目标进行截击并允许截击的地段,由武装直升机的战斗活动地段和遭遇地段确定,示意图如图2所示.

图2 武装直升机地段
战斗遭遇地段是可能截击点到退出拦截点之间的地段,可能截击点定义为警戒雷达发现来袭目标后立即引导直升机进行拦截,直升机与目标遭遇并投入攻击的最远点.
战斗活动地段表达为

可能截击点满足方程

由上两个方程可得可用截击地段
式中,r为直升机作战半径;d为目标到机场的航路捷径;Srad表示目标被雷达发现时距离机场的距离;t为直升机升空到与目标遭遇时的飞行时间;Vheli为直升机的飞行速度;tdel为雷达情报报知延误时间;tsta为直升机起飞时间.
当可用截击地段和需要截击地段满足Dava>Dreq关系时,方可进行拦截.
2 拦截模型
2.1 引导模型
武装直升机要实现对目标的攻击,须首先将机场待战载机引导至作战区域.此引导过程主要是由地面综合引导保障系统或空中预警机来完成.引导拦截过程如图3所示.

图3 引导拦截示意图
武装直升机在引导条件下的最大作战半径受引导雷达与引导通信的最大引导距离和续航能力三者共同约束,则最大作战半径可表示为

式中,Rtc为引导雷达对空引导距离,Rc为通信电台对空引导距离,Rs为通视距离,D为直升机续航能力决定的最大飞行距离.
2.2 搜索跟踪模型
直升机到达作战空域后,第二步是搜索跟踪目标.武装直升机搜索跟踪主要通过火控雷达完成,其搜索跟踪概率可用搜索目标条件下的发现概率和建立稳定跟踪概率的乘积表示,即

式中,PS为搜索跟踪概率;PD为搜索目标条件下的发现概率;PT为火控雷达建立稳定跟踪的概率.
机载火控雷达一般采用多普勒体制,对于采用非相参脉冲积累技术的火控雷达,其波束接触目标条件下的发现概率可表示为[11]

式中,N为非相参脉冲积累数;为多普勒滤波器输出的平均功率信噪比.
机载火控雷达搜索目标条件下的发现概率为

式中,Pl为目标落入雷达搜索区的概率;n为单位搜索时间内雷达波束与目标接触次数.
由于多普勒体制雷达较为先进,通常在无人为干扰的情况下,直升机在搜索到目标时即可建立稳定跟踪,故可认为稳定跟踪概率PT的值近似为1,因此,有

2.3 攻击毁伤模型
对空攻击是武装直升机执行拦截任务,消灭空中来袭目标的手段,根据使用武器和拦截方式的不同,武装直升机有两种典型的对空攻击方式:超视距导弹攻击和近距航炮攻击.
2.3.1 超视距导弹攻击
1)导弹发射区与导弹发射成功概率
受导弹性能、载机及目标运动状态的影响,直升机在发射导弹时,首先要计算导弹发射区.为追求计算的实时高效性,火控系统通常会采用简化动力学方程的方法对发射区进行快速模拟求解,故其所求发射区是对动力学方程求解法得到的真实发射区的一种近似,称为近似发射区[12].如图4所示,近似发射区是火控系统用以判断是否达到发射区的模型,而真实发射区是火控系统中无法实现的模型,两者重合的程度(对应于区域Ⅱ)代表着导弹发射成功概率.
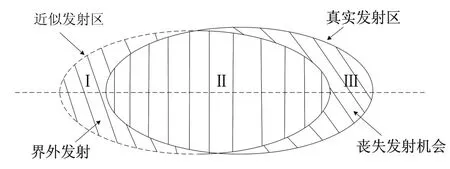
图4 导弹真实发射区和近似发射区
导弹发射成功概率可近似表达为

式中,Pob为界外发射概率,对应于区域Ⅰ;Pmc为丧失发射机会的概率,对应于区域Ⅲ.
直升机在设计时,通常会将Pmc、Pob值控制在0.15以下,并将Plau的值控制在0.7以上.由于直升机各种传感器数据精度及近似发射区边界误差的影响,Pmc、Pob的每一次取值都会随着随机误差产生一定波动,从而影响到Plau的取值.这里用蒙特卡洛方法对其取值进行模拟,假设Pmc、Pob相互独立且均服从威尔布分布

结合式(8),可得Plau的直接抽样公式

式中,x为随机变量;m、η、γ分别为形状参数、尺度参数和位置参数;R1,R2为区间[0,1]上的均匀分布.
则Plau的n次抽样平均值为

n足够大时即为发射成功概率.
2)导弹单发毁伤概率
空空导弹通常采取主动雷达制导方式,假设导弹弹着点散布服从圆正态分布

脱靶距离服从瑞利分布

导弹破片杀伤概率可表示为

式中,σ为均方根偏差

其中,S/N为末制导雷达信噪比;Rev为平均射击距离(km),Rev=0.619R,R为导弹射程(km);c1,c2,c3为拟合常数,一般可取c1=2.09×10−16,c2=18.5,c3=58;r0为目标等效圆半径;CEP为导弹圆误差概率.
3)导弹单发拦截概率
第i枚空空导弹对目标的拦截概率可表示为

2.3.2 近距航炮攻击
1)单次航炮攻击毁伤概率
当直升机发射完空空导弹后,迅速机动至有利位置,使用航炮对目标采取前置跟踪攻击.受载机最大过载及射击条件的限制,目标只有位于可攻击区,直升机才能顺利对目标进行前置跟踪射击.假设目标落入可攻击区的概率为Pc,一次占位只对目标进行一次射击,航炮每次可射击n发弹丸,单发弹丸的杀伤概率为P0.则航炮一次射击对目标的杀伤概率可表示为
2)单次航炮攻击拦截概率
直升机第k次航炮拦截对目标的毁伤概率可表示为

3 武装直升机拦截任务分配模型
1)武装直升机拦截原则.拦截按照目标威胁大,优先拦截的原则,对不同批次目标予以拦截.原则如下:
a)先拦截近距离目标,再拦截远距离目标;
b)先拦截航路捷径小的目标,再拦截航路捷径大的目标;
c)先拦截反辐射无人机数量多的批次,再拦截反辐射无人机数量少的批次;
d)指定的目标优先拦截.
2)任务分配步骤
a)当反辐射无人机群被警戒雷达发现时,即对机场待战飞机进行拦截任务分配.
b)确定该批次反辐射无人机威胁等级.根据拦截原则可令目标威胁度为

式中,mj为第j批次目标中反辐射无人机数量;cj为第j批次目标的穿越次序;δ∈{0,1},取1时表示目标已指定,取0时表示目标未指定;为第j批次目标的航路捷径的幂函数;b、k为常数,可取k=1.2,b=0.1.
c)拦截条件判断.当拦截满足Dava>Dreq且威胁等级wj≥w0(w0表示能够容忍的最大威胁)时,考虑进行拦截,否则不进行拦截.
d)拦截任务分配.设机场最多可同时引导n批次武装直升机执行拦截任务,某一时刻有m批次目标进入防区,对于满足步骤Ⅲ中条件的目标分配直升机予以拦截.定义任务分配矩阵X=[xij]&n×m,元素xij为布尔量,取1时表示引导第i批直升机对第j批次目标进行拦截,取0则表示不进行拦截.
任务分配最终是为了实现目标函数

对于满足拦截条件的目标,一次出动Nj架直升机起飞拦截,这里令

式中,表示向下取整.
e)威胁度重新赋值.对已分配拦截任务的目标,重新确定其威胁度.
假设每架武装直升机可发射a枚空空导弹,并进行b次航炮射击,射击时火力平均分配给同一批次中的各个目标,一次拦截后令

则威胁度变为

f)新一轮任务分配.假设拦截采用“拦截—评估—拦截”模式,拦截结束后直升机反场不再占用引导资源,一轮拦截完成之后,从该批目标航线上自拦截点开始重新计算可用截击地段,再进行新一轮任务分配.
4 拦截效能评估
这里用平均拦截率指标来衡量武装直升机对批目标的拦截效能,将武装直升机对目标j累积拦截次数记为Nj·Σ,且对目标j的各次拦截出动直升机数记为Kij(i=1,2,···,Nj·Σ),每架武装直升机可发射导弹数和进行航炮攻击次数同式(22),分别为a和b,射击时火力随机分配给同一批次中的各个目标.
则对第j批目标,平均每个单目标承受空空导弹攻击数为

承受航炮的攻击次数q2为

将q1、q2表示成整数部分和小数部分之和的形式有

式中,符号[]表示取整;、分别表示q1和q2的小数部分.
假设武装直升机各次攻击之间相互独立,则对第j批目标中各架反辐射无人机的拦截概率为

令Yl表示对第l架反辐射无人机拦截是否成功,1表示成功,0表示不成功,拦截概率为Pint·l,则有

拦截反辐射无人机架次为

平均拦截反辐射无人机架次为

则平均拦截率为

为了更加直观地反映拦截效能的高低,这里将拦截效能划分为4个等级.约定拦截率落入区间[0.75,1]、[0.5,0.75)、[0.25,0.5)、[0,0.25)的效能等级分别为一级、二级、三级和四级.拦截率与效能等级对应关系如表1.

表1 拦截率与效能等级对应关系表
5 实例计算
为了验证武装直升机拦截反辐射无人机的有效性,设置一个实例进行仿真计算,使用Matlab编程实现.假设武装直升机实施拦截过程中无人为干扰因素存在,某一时刻地面警戒雷达发现侦察空域范围内有10批次反辐射无人机,决定引导直升机以“拦截—评估—拦截”方式对其予以拦截,假设地面综合引导保障系统最多同时引导5批次机场待战武装直升机起飞拦截,引导条件下的最大作战半径为150km,警戒雷达发现目标距离为200km.拦截时首先根据各批次反辐射无人机的数量、航路捷径、穿越次序、是否指定等情况判断各批次目标的威胁度,同时根据反辐射无人机速度、对机场航路捷径,直升机速度、起飞时间、一次占位和攻击时间,警戒雷达情报报知延误时间等参数计算需要截击地段和可用截击地段,并判断二者是否满足Dava>Dreq约束关系,然后按照拦截任务分配的原则和步骤以一定时间步长进行实时仿真,一轮拦截完成后重复上述步骤进行新一轮拦截,最终可得到武装直升机的拦截调度方案以及拦截结果,数据结果的呈现见表4和图7∼图10所示.仿真中各批次反辐射无人机目标情况如表2所示,其他所需的各参数设置见表3.
结果分析:图5为导弹发射成功概率Plau的10万次抽样分布直方图,由图可看出其值集中于0.75附近,符合直升机设计要求.
表3中的数据显示,武装直升机一共进行了两轮拦截任务分配,根据表中的调度方案,除了第6批目标没有超过最大容忍威胁度而未进行拦截外,武装直升机对其他批次目标拦截效能均为二级和一级,对指定目标批次的拦截率均达到了0.7以上,其结果在图6中有更为直观的呈现.
图7中平均拦截目标架次占据了目标总数较高比重,说明大多数目标被有效拦截;图8中各批次目标的威胁度也呈下降趋势变化,经两轮拦截后目标的威胁度基本上降至容忍威胁度以下.

图5 Z的10万次抽样统计直方图

表2 目标相关参数设置

表3 其他参数设定

表4 仿真试验结果数据

图6 拦截率及拦截效能等级

图7 平均拦截架次占目标总数比重

图8 各次拦截威胁度变化趋势
6 结论
本文通过对武装直升机空中拦截过程进行建模,从定量的角度研究了武装直升机拦截效能.仿真结果显示,武装直升机用于拦截反辐射无人机可达到较高效能等级.文中的拦截任务分配模型对于武装直升机的调度也具有一定的借鉴意义.
