基于工业机器人运动学仿真分析的综述
2016-10-31重庆交通大学机电与车辆工程学院
周 浩 刘 柱 / 重庆交通大学机电与车辆工程学院
基于工业机器人运动学仿真分析的综述
周浩 刘柱 / 重庆交通大学机电与车辆工程学院
本文主要针对工业机器人运动学仿真的分析方法进行了综述,主要有D-H法、MATLAB工具箱法、Adams软件法以及CATIA软件法。D-H分析法能够得出空间位置解析式,但不能直观观察机构的运动以及不能分析速度与加速度,而M ATLAB、Adams、CATIA软件不仅能够观察机构的实际运动状况,还能够分析速度与加速度。
工业机器人; D-H;三维软件; MATLAB;运动学仿真
引言
作为人类20世纪最伟大的发明之一,机器人在短短的几十年内发生了日新月异的变化,机器人技术的出现和发展,不但使传统的工业生产面貌发生根本性变化,而且将对人类的经济发展产生深远的影响。机器人广泛应用于社会的各行各业,包括:医疗、机械、物流、制造、汽车等。工业机器人主要有关节型机器人、球坐标型机器人、圆柱坐标型机器人、直角坐标型机器人。对于工业机器人的运用,它的运动空间位置与速度、加速度是十分重要的。因此,本文主要叙述了机器人运动学仿真分析的方法。
1 .D-H法
D-H法是1995年由Denavit和Hartenberg提出的一种建立相对位姿的矩阵方法。多自由度机器人是具有多个关节的空间机构,为了描述末端执行机构的空间位置,在之前的各个关节建立坐标系(如图1),再利用齐次变换描述各个连杆相对于固定参考坐标系的空间几何关系,即用一个4 4的齐次变换矩阵描述相邻两连杆的空间关系,从而推导出“末端执行机构坐标系”相对于“基坐标系”的等价齐次变换矩阵,建立执行机构的运动学方程。
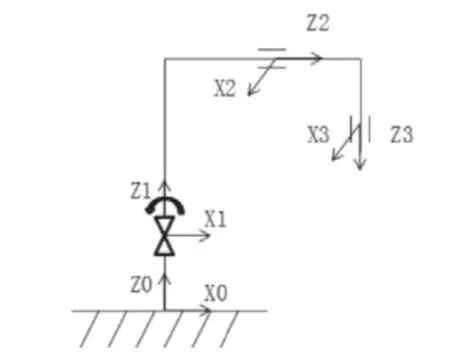
图1 三自由度工业机械手臂D-H模型
在建立空间位姿方程以后,需要对位姿方程进行仿真分析。仿真的方法主要有:图解法、解析法、数值法。图解法直观但易受自由度的影响,解析法精度高,但是不直观、通用性不强。因此,一般采用数值法,充分利用计算机的图像和数据处理能力。一般采用概率论里的蒙特卡洛方法,即通过MATLAB软件的rand()函数产生位姿方程的关节变量随机值,再带入位置方程,得到末端执行机构参考点的坐标值,然后利用plot3函数画出空间的点,最后就得到了末端执行机构的位置工作空间(如图2)。
对图2工作空间分析可以得出:D-H分析方法能够较为准确的分析机器人末端执行机构的工作空间,但是不能直接观察机器人的实际运动状态,不够直观。另外,对于末端执行机构的加速度分析主要利用运动学逆解以及各机构的几何位置关系,推导较为复杂。
2 .软件求解法
2.1MATLAB软件
MATLAB是一个功能强大的软件,在其中包含了许多的专业工程应用领域的工具箱,Robotics-toolbox工具箱就可以应用在D-H结果分析。要使用工具箱对工业机器人对象的建立,就需要Robotics-toolbox工具箱集成的大量库函数。对于给出的D-H参数,利用Link函数与Robot函数建立模型,再利用Drivebot函数生成三维模型,最后驱动关节标尺的滑块,观察末端执行机构的空间运动情况(如图2)。对于空间工作位置的数据获取,需要利用Fkine函数。当然,MATLAB软件可以对工业机器人做速度与加速度的分析,主要利用Fdyd函数和Accel函数。其中,Fdyd函数得到关节的速度向量,Accel函数得到关节的加速度向量。
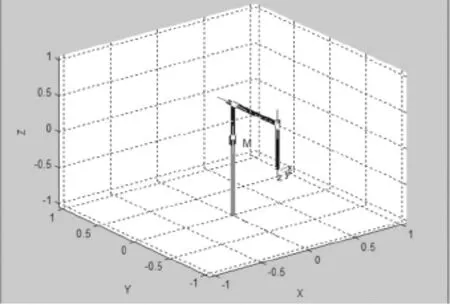
图2 MATLAB工具箱建立模型
2.2Adams软件
Adams软件是美国MDI公司开发的虚拟样机分析软件,它使用交互式图形环境,能够进行运动学、动力学、静力学分析得到速度、加速度、位移曲线。专业的仿真软件Adams不仅能够直接观察机器人的运动,还能求出机器人的工作空间以及工作性能曲线。
具体操作过程:在三维建模软件UG里建好机器人模型后导入Adams软件,在Adams里添加运动副,计算机构的自由度,自由度为0才可以进行仿真。然后制定运动方案,对模型施加驱动副(一般为Adams的库函数),最后进行仿真。通过仿真,我们可以得到仿真的动画、工作空间以及速度的数据。对数据进行处理我们就能够直观、准确的对工业机器人末端执行机构进行空间以及运动学分析了。
对于Adams软件能够直观、较准确的分析末端执行机构的空间工作情况,但是这是基于其中的库函数,对于库函数,中间的迭代过程存在精度问题,会对结果产生一定的误差。
2.3CATIA软件
CATIA软件是由法国Dassault System公司旗下的CAD/CAE/ CAM一体化软件,它具有零件设计、装配、仿真等功能。对于工业机器人的运动学分析,我们也可以采用CATIA软件进行分析。
首先将工业机器人的底座、各关节、连杆等零件画好,再进入CATIA软件装配设计模块,将各个零件按相和与接触的关系装配好,得到三维实体模型。然后,进入DMU运动机构模块,设置好驱动件后,自由度为0才可以仿真。其中,必须对驱动件进行法则曲线的绘制,即为驱动件的运动规律。其次,利用软件的测量功能对末端执行机构的空间位置以及执行机构上的一点相对应基座的速度、加速度进行测量。最后,利用法则曲线对末端执行机构进行仿真,激活传感器记录测量的空间位置以及速度、加速度。将测得的数据处理之后就可以得到工作空间以及速度、加速度。
3 .总结
D-H分析通过蒙特卡洛仿真的方法能够较为准确的对末端执行机构进行分析,但不够直观,对加速度与速度的分析较为复杂。当然,我们可以充分利用MATLAB的工具箱,Robotics-toolbox是专门针对机器人研究的工具箱,可以利用工具箱的Fkine函数进行工作空间的分析,也可以利用工具箱的Fdyd 和Qdd函数进行关节的位移与速度分析。
Adams软件求解直观、简单,能够对工业机器人进行工作空间、速度、加速度分析。另外,我们可以利用三维建模软件CATIA的DMU运动机构模块进行仿真,直接在CATIA建立模型装配约束后,根据运动规划画出法则曲线,然后进入DMU模块进行仿真。
[1]赵悟,雒晓辉,杨力超,等.车载式绿篱修剪机的设计与仿真[J].设备管理与维修技术,2010,02(12):79-82.
[2]姚征,丁蕴丰.三自由度气动机械手的运动分析及仿真研究 [J].工业技术创新,2015,02(06):579-582.
[3]吴晓风.林业修剪机器人运动学、动力学仿真 [D].南京:南京林业大学,2007:5-20.
[4]张大庆.液压挖掘机工作装置运动控制研究 [D].湖南:中南大学,2006:20-44.
[5]高微,杨中平,赵荣飞,等.机械手臂结构优化设计 [J].机械设计与制造 ,2006,01(01):13-15.
