带平转功能的发动机缸体抓取机械手
2016-10-29张允良
张允良,陈 涛
(大连机床集团有限责任公司 技术中心,辽宁 大连 116620)
带平转功能的发动机缸体抓取机械手
张允良,陈涛
(大连机床集团有限责任公司 技术中心,辽宁 大连116620)
文章介绍了为发动机缸体自动生产线设计的一种能够自动上下料并带有平转功能的机械手。对发动机缸体毛坯结构特点、输送运动状态等进行了较深入的分析。机械手采用发动机缸体缸孔及顶面定位,液压驱动,并通过PLC控制其整个动作过程。同时对机械手整体结构、控制系统和部件组成、动作原理进行了介绍。经实践验证,该机械手具有很好的应用前景。
自动线;专用机械手;PLC
0 引言
由于工业自动化的全面发展和科学技术的不断提高,对工作效率的提高迫在眉睫。单纯的手工劳作已满足不了工业自动化的要求,因此,必须利用自动化设备以取代人的劳动,满足工业自动化的需求。其中机械手是其发展过程中的重要产物之一,它不仅提高了劳动生产的效率,还能代替人类完成高强度、危险、重复枯燥的工作,减轻人类劳动强度,可以说是一举两得。在机械行业中,机械手越来越广泛的得到应用,它可用于零部件的组装,加工工件的搬运、装卸,特别是在自动化生产线、组合机床上使用更为普遍[1]。目前,机械手已发展成为柔性制造系统FMS和柔性制造单元FMC中一个重要组成部分。把机床设备和机械手共同构成一个柔性加工系统或柔性制造单元,可以节省庞大的工件输送装置,结构紧凑,而且适应性很强。相比通用机械手而言,专用机械手还具有结构简单,成本较低,可靠性较高的特点,因此针对专用机械手的开发设计,无论是从经济上,还是在技术上都是十分必要的[2]。
本文为某柴油机生产线项目——双面卧式两端面柔性加工组合机床,开发设计了一台自动上下料并带有平转功能的机械手。它采用圆柱坐标型的运动形式,液压系统驱动,PLC系统控制。功能原理先进,动作可靠,结构合理,安全经济,满足生产要求。
1 方案设计
1.1被输送的发动机缸体结构
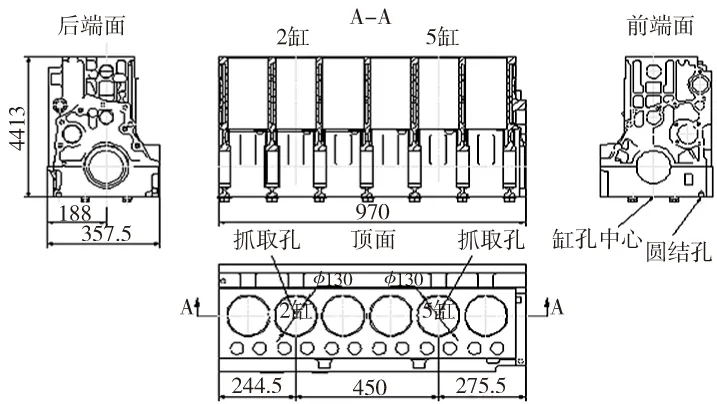
图1 发动机缸体结构示意图
如图1所示,该发动机缸体是典型的箱体结构,具有六个缸孔、一个曲轴孔,称为六缸发动机。抓取采用2号、5号缸孔及顶面为定位面,抓取部位为发动机下缸孔。
1.2被输送的发动机缸体运动状态分析
根据自动线对发动机缸体运行状态的要求,机械手要完成将缸体从一个固定高度提升(或下降)到另一固定高度,同时完成90°平转动作,缸体运动状态分析如图2所示。
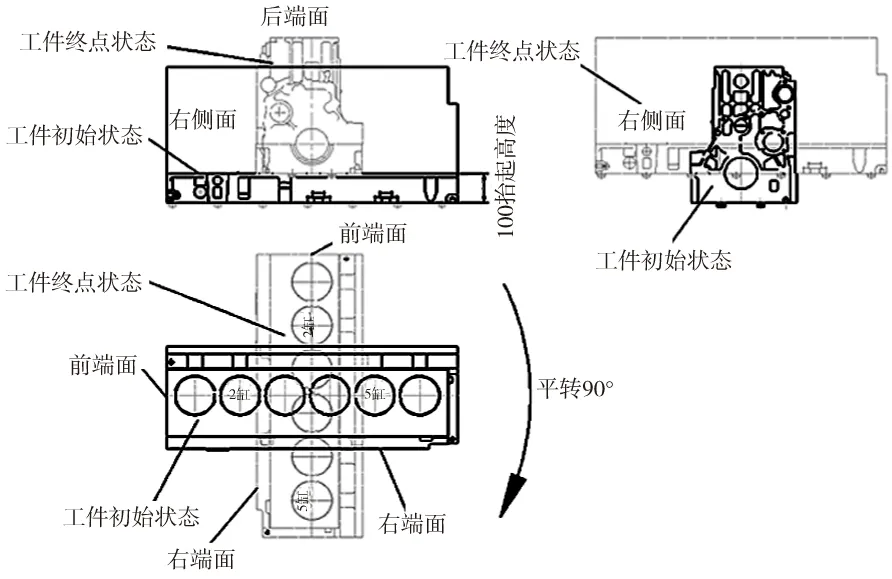
图2 发动机缸体运动状态示意图
工件初始位置在低处,经过机械手提升及平转复合动作,实现缸体从低处到高处的姿态转变。
1.3机械手动作分析
发动机缸体首先被机械手夹持,然后提升到高点进行平转,落下到指定的高度,手抓松开。其周期运动可以表达为:落下—夹紧—抬起—平转—落下—松开—抬起—返转。
目前常采用伺服电机控制方式来实现机械手升降及平转复合运动,此方法需要控制系统配置相应的驱动器等电气元件,增加电气结构相对简单的组合机床投资成本,因此采用液压驱动是比较理想的选择。但传统的液压机械手结构只能完成单一的升降或平转功能,因此有必要开发一种结构紧凑、复合度高、维护简便的液压驱动机械手[3]。
2 复合运动机械手总体设计
2.1总体结构
工业机械手的结构形式主要有四种:直角坐标型,圆柱坐标型,球坐标型和关节型[4]。各结构形式及其相应的特点,分别介绍如下:
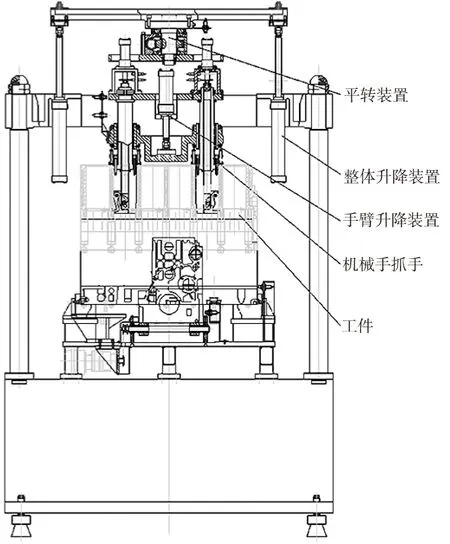
图3 机械手结构简图
(1)直角坐标机械手的空间运动是用三个相互垂直的直线运动来实现的,其工作空间为长方体。
(2)圆柱坐标机械手结构特点
圆柱坐标机械手的空间运动是由一个回转运动及两个直线运动来实现的,其工作空间为圆柱形。
(3)球坐标机械手结构特点
球坐标机械手的空间运动是由两个回转运动和一个直线运动来实现的,即一个回转,一个俯仰和一个伸缩,其工作空间是一个类球形。
(4)关节型机械手结构特点
关节型机械手的空间运动是由三个回转运动实现的,这种机械手与人体上肢类似。
根据本次设计的要求,工件要同时完成垂直升降和平转运动。考虑结构紧凑,选择圆柱坐标型[5]。其结构简图如图3所示。
图3中,机械手分为机械手抓手(抓取缸体)、手臂升级装置(用于第一级高度提升)、整体升级装置(用于第二级高度提升)、平转装置(用于机械手平转)。下文将就各个部件的结构形式及原理进行描述。
2.2机械手抓手结构
该机构是实现工件夹紧动作的装置。

图4 机械手抓手结构简图
主要组成零件:手指、手臂、压板、弹簧、固定法兰、导杆、推杆、油缸支架、发令挡铁、发令开关、抓手油缸(见图4)。
动作原理:推杆前端有与固定在手指上的销轴相配合的导向槽,该导向槽带自锁。当推杆在抓手油缸驱动下做向下直线运动时,固定在手指上的销轴沿推杆前端的导向槽做复合运动,迫使手指绕固定在手臂上的转轴旋转,手指张开并机械自锁,同时压板在弹簧力的作用下将工件压紧。松开动作为逆过程。
结构特点:液压驱动[6-7],开关发令,机构简单,手指带机械自锁,可有效防止由于动力突然缺失时手指松开而造成不应有的损失。
2.3手臂升降装置结构
手臂升降装置的结构如图5所示。
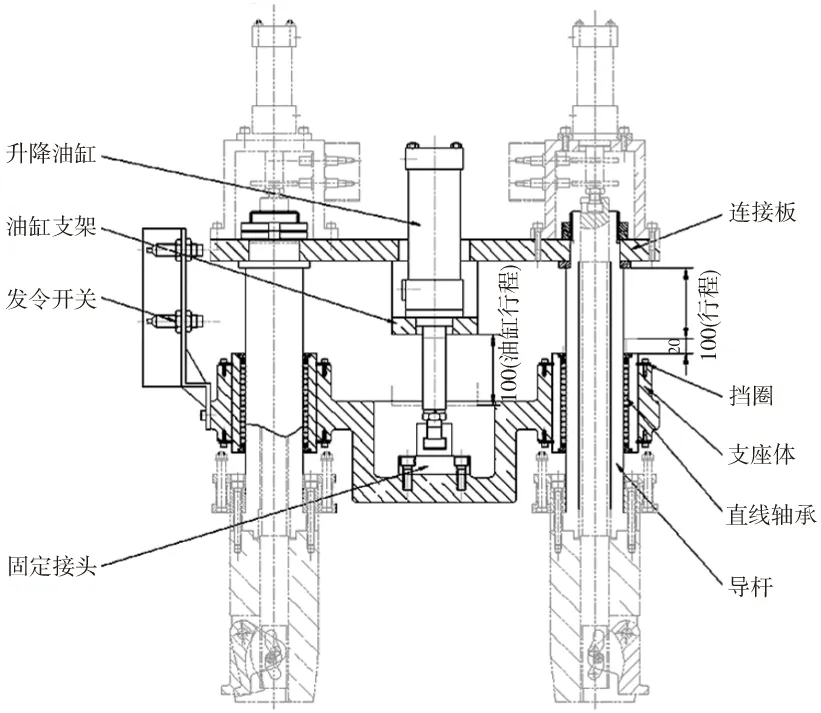
图5 手臂升降装置结构简图
该机构是实现手臂第一级升降动作的装置,油缸行程100mm是发动机缸体始末状态的高度差,当有不同高度要求时,只需要改变油缸相应的需要行程即可实现。
动作原理:升降油缸缸体通过前端法兰盘与油缸支架相连,油缸支架与连接板固定,连接板通过锁紧螺母与手臂末端相连。升降油缸活塞杆通过固定接头与支座体相连,支座体上安装直线轴承与手臂导杆配合。当升降油缸大腔进油,活塞杆伸出时,支座体固定不动反作用连接板带动手臂向上运动,手臂抬起。当升降油缸小腔进油,活塞杆退回时,支座体固定不动反作用连接板带动手臂向下运动,手臂落下。
结构特点:液压驱动,开关发令,机构简单,通过升降油缸行程来改变工件始末状态的高度。
2.4平转装置结构
该机构是实现机械手平转动作的装置,该机构平转角度是由齿条活塞的行程决定的。

图6 平转装置结构简图
主要组成零件:齿轮、齿条活塞、齿条挡铁、调速阀、发令开关、发令挡铁、心轴、箱体、连接板圆锥滚子轴承、推力圆柱滚子轴承、支柱,如图6所示。
动作原理:心轴与齿轮通过平键固定联结,齿条活塞与箱体组成一个回转油缸,箱体与连接板固定联结,连接板通过支柱与支座体联结。当回转油缸一腔进油时,齿条活塞相对齿轮运动,由于齿轮固定则整个装置围绕心轴旋转,旋转角度可通过齿条挡铁调整,旋转速度可通过液压调速阀调整,始末位置有开关发令[7]。
结构特点:液压驱动,机构简单,平转速度平稳。
2.5整体升降装置结构
该机构是实现机械手整体升降动作的装置,机械手整体升级后可以进行平转动作,升级行程由升级油缸行程决定。

图7 整体升降装置结构简图
主要组成零件:升降油缸、固定接头、连接体、可调挡铁、导向柱、固定挡铁、直线轴承、连接板、发令开关、拖链、顶盖、支柱,如图7所示。
动作原理:升降油缸缸体通过前端法兰盘与顶盖固定联结。升降油缸活塞杆通过固定接头与连接体相连,顶盖上安装直线轴承与一端固定在连接体上的四个导向柱配合,导向柱另一端与连接板联结。当升降油缸大腔进油,活塞杆伸出时,活塞杆推动带有导向的连接体向上运动,整体抬起。当升降油缸小腔进油,活塞杆退回时,活塞杆拉动带有导向的连接体向下运动,整体落下,落下行程可由可调挡铁调整。
结构特点:液压缸直接驱动,液压缸既是驱动元件,又是执行运动件,因此不用再额外设计执行件,控制简单[8]。
2.6机械手控制系统
机械手的定位系统采用开关控制系统,在设定位置安装无触点式行程开关。采取PLC程序控制[9-10]。
机械手的驱动系统采用液压驱动系统,具承载能力大,惯量大以及在防火防爆的环境中使用的特点。
3 结束语
综上所述,“带平转功能的发动机缸体抓取机械手” 采用两套油缸驱动满足了两级高度升降的要求,同时采用齿轮齿条传动实现了机械手平转功能,避免了相同动作需要伺服驱动的成本投入,具有结构紧凑,便于维护的特点。该装置经过精心的设计和制造,实践证明在使用过程中一直保持稳定。
[1] 孙志杰,王善军,张雪鑫.工业机器人发展现状与趋势[J]. 吉林工程技术师范学院学报,2011,27(7):61-62.
[2] 周寿明,邓成良.可用于生产线的工业机器人研究[J].科技创新导报,2008(7):59-59.
[3] 于英华.组合机床设计[M].北京:清华大学出版社,2012.
[4]A Elkady,J Joy,T Sobh,et al.Modular Design: A Plug and Play Approach to Sensory Modules, Actuation Platforms, and Task Descriptions for Robotics and Automation Applications[J]. Journal of Intelligent & Robotic Systems, 2014, 75(2):271-289.
[5]Warnecke H J,Schraft R D,M Barth,et al. Manipulator Design[M]. John Wiley & Sons, Inc., 2007.
[6]成大先.机械设计手册液压传动[M].北京:化学工业出版社,2009.
[7]梅荣娣. 液压与气压传动控制技术[M].北京:北京理工大学出版社, 2012.
[8]张培志.电气控制与可编程序控制器[M].北京:化学工业出版社,2014.
[9] 王月芹.基于PLC的机械手控制系统设计[J].液压与气动,2011(9):41-43.
[10] 王庆华. 基于PLC机械手控制系统设计[J]. 电子世界, 2014(10):494-495.
(编辑赵蓉)
Engine Block Manipulator with Flat Transfer Function
ZHANG Yun-liang, CHEN Tao
(Technology Center, Dalian Machine Tools Group, Dalian Liaoning 116620, China)
A kind of manipulator with flat transfer function is introduced, which is designed to automatic line loading and unloading engine block. The structural characteristics of the engine cylinder block and the requirement of conveying motion state are analyzed. The mechanical hand is used to locate the cylinder bore and the top surface of the engine cylinder, and the hydraulic drive is used to control the whole operation process through PLC. Respectively, the manipulator overall structure, and control system of the main function, component composition, action principle is introduced. Practice has proved that ,with good applicability.
automatic line;special manipulator;PLC
1001-2265(2016)04-0135-03DOI:10.13462/j.cnki.mmtamt.2016.04.036
2016-01-20;
2016-03-09
张允良(1971—),男,辽宁大连人,大连机床集团技术中心,高级工程师,硕士,研究方向为机床设计,(E-mail)zhangyldl@sina.com。
TH165;TG659
A