内啮合凸轮式间歇运动机构的运动分析
2016-10-29刘艳秋胡建忠陶学恒
刘艳秋,胡建忠,陶学恒
(大连工业大学 机械工程与自动化学院,辽宁 大连 116034)
内啮合凸轮式间歇运动机构的运动分析
刘艳秋,胡建忠,陶学恒
(大连工业大学 机械工程与自动化学院,辽宁 大连 116034)
内啮合步进波动机构是一种具有中间挠性件的间歇运动机构,适用于中、低速传动,具有良好的运动特性。文章运用微分几何及啮合原理对该机构进行了运动分析,推导了角度、角速度、角加速度、压力角的传递函数公式以及曲率表达式,并对输入传统运动规律时的输出情况进行对比,得出余弦运动规律的运动性能最好的结论,为该机构的推广应用提供了理论基础。
步进运动;间歇机构;滚子链条;机构学
0 引言
带挠性件的间歇运动机构早在几十年前就已出现,并在前苏联、德国得到较为广泛的应用 。这种间歇的步进波动机构是带有链条的挠性传动,适用于中、低速传动,性能好,成本低,可广泛应用于工业、电子等流水作业的自动生产线。它的突出特点就是可以实现传统的刚性构件难于实现的传递函数和工作性能。 这种机构在我国只有简单的原理的阐述,尚无设计计算资料,更无其成型产品和应用。
本文运用圆矢量方法、微分几何理论、平面曲线的啮合原理对此机构进行了传递函数、压力角等公式的分析推导,并对从动件的几种典型运动规律的机械性能进行了研究。
1 工作原理
带挠性件的间歇运动机构是靠“变形波”传动的。其原理是挠性件的变形波传动原理[1]。如图1所示,不可伸长的挠性体1支承在平面3上,挠性体上的一点处于x0位置。在其左端出现一个向右移动的变形波波及到x0点时,必将该点浮起并移至x点位置;当变形波通过后,x0点经x位置到达x1点位置;变形波继续右移,x1点位置不变。由图可见,挠性体的变形波经历了出现与消失过程,使挠性体1右移距离Δx。挠性件上不存在变形波的部分是靠摩擦力或啮合力与支承面接触而静止。这就是横向变形波传动原理,也是“青虫”等软体爬行动物的爬行机理。
支撑在圆柱面上的横向变形波,同样可使挠性件上的点实现步进运动。如图2所示,激波器2使挠性件1沿圆柱面3绕o点以角速度ω转动,产生横向变形波。

图1 步进变形波移动过程

图2 支承在圆柱面上的横向变形波传动原理模型
2 运动几何分析
外啮合凸轮式步进波动机构的简化模型如图3所示,其运动分析在文献[3]中已有阐述,本文着重对内啮合凸轮式步进机构的运动特点进行分析。
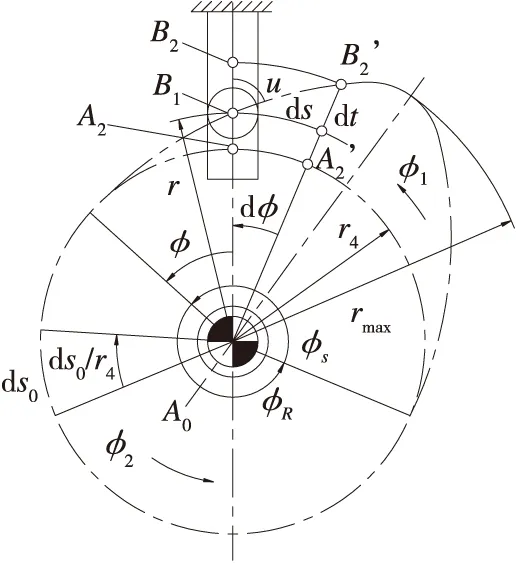
图3 外啮合凸轮式步进波动机构模型图
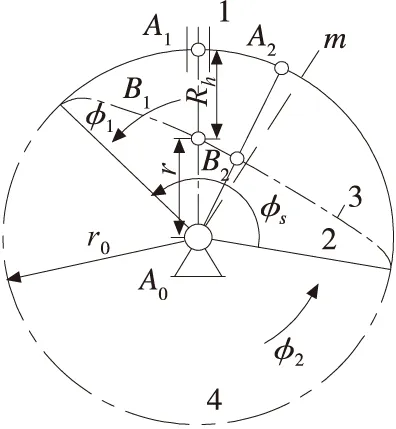
图4 内啮合轮式步进波动机构模型图
图4所示为内啮合凸轮式步进波动机构的简化模型图。链轮分度圆基圆半径用r0表示,r表示凸轮廓线矢量,φ1为主动凸轮转角,φ2为从动链轮转角,φs为凸轮廓线包角。ds、dr、dφ1分别表示凸轮廓线弧长、矢径长和转角的微分量。Rh为凸轮廓线基圆内部分矢径,则内啮合凸轮式步进波动机构的廓线方程可表示为:
(1)
所以有:

(2)

(3)

(4)
可得:

(5)
(6)

(7)
式(5)、式(6)、式(7)即为内啮合凸轮式步进波动机构的角度、角速度、角加速度传递函数公式。下面分析其压力角公式。由
(8)
可得:
(9)
曲率为:
(10)
其中:
通过以上分析得到了凸轮式步进波动机构的传递函数公式、压力角和曲率表达式,为该机构的进一步分析奠定了理论基础。
3 运动规律特性分析
仅仅知道了凸轮式步进波动机构的传递函数是不够的,重要的是要了解其运动规律特性,以便选择适合要求的凸轮轮廓曲线。机构在运动过程中,滚子往返一次,从动链轮产生一次步进,所以链轮输出的运动规律取决于直动滚子的运动规律,为便于分析和研究,可把滚子和凸轮这部分看成对心直动滚子从动件的平面凸轮机构,当直动滚子取不同的运动规律时,从动链轮输出不同的步进运动规律。
当内啮合凸轮式步进波动机构的扇形凸轮廓线为不同运动规律时,经传递函数,也可得到输出运动规律及压力角的不同情况。下面以φs为150°为例,通过选取几组特殊值来比较一下各种常用运动规律的加速度最大值a和位移最大值s情况。参见表1。各种运动规律代号如下:
r0—分度圆半径;r—向径; 1—余弦规律;
2 —摆线规律;3—修正梯形规律;
4—修正正弦规律;5—修正等速规律

表1 不同运动规律下最大角加速度、最大角位移
对于内啮合凸轮式步进波动机构4结束语
来说,根据各种运动规律的加速度峰值可见,余弦规律运动性能最好,修正等速规律次之,接着依次是修正正弦规律、摆线规律,修正梯形规律的运动性能最差。
本文对内啮合凸轮式步进波动机构进行了传递函数的推导,并通过扇形凸轮廓线为不同运动规律时加速度最大值对比,得出余弦运动规律性能较其他基本运动规律好的结论。为今后该机构的进一步研究奠定了基础,也为下一步原型机设计提供了理论依据。
[1] 刘政昆. 间歇运动机构[M].大连:大连理工大学出版社,1991.
[2]K Bauer,J Volmer . Synthese Des Kettenkurvenschrittgetriebes[J].Mech.Mach.Theory,1995,30(1):91-99.
[3] J 伏尔默.凸轮机构[M].郭连声,柴邦衡,译.北京:机械工业出版社,1991.
[4] 刘昌祺.凸轮机构设计[M].北京:机械工业出版,2005.
[5] 石永刚. 凸轮机构设计与应用创新[M]. 北京:机械工业出版社,2007.
[6] 刘艳秋.凸轮式步进波动机构的分析与设计[D].大连:大连轻工业学院,1997.
[7] 刘艳秋.凸轮式步进波动机构运动设计[J].大连轻工业学院学报,1997,16(3):36-39.
[8] 刘艳秋.凸轮式步进波动机构的原型机设计[J].机械科学与技术,2003,22(2):245-246.
[9] 徐海军,潘存云,谢海斌,等.波动发生器中的圆盘凸轮轮廓设计及计算仿真[J].机械研究与应用,2005(4):69-71.
[10] 金旭星.一种考虑角速度波动的凸轮轮廓曲线修正方法[J].机械设计与制造,2013(6):212-214.
(编辑赵蓉)
Motion Analysis of the Intermittent Mechanism with Internal-meshing Cams
LIU Yan-qiu,HU Jian-zhong,TAO Xue-heng
(School of Mechanical Engineering and Automation, Dalian Polytechnic University, Dalian Liaoning 116034,China)
Stepping-wave-cam mechanism with internal-meshing cams is kind of intermittent mechanism of middle flexible appendages. It is particularly adaptable in slow and high-duty circumstances, due to its excellent kinematic feature. Based on differential geometry and meshing principle, By means of the kinematic analysis on the mechanism, the transmit functions and curvature formulae of the angle, angular velocity, angular acceleration, pressure angle were derived. Comparison of the output results while inputting the traditional motion law, the best conclusion of motion performance of the motion law of cosine has been drawn. The paper introduces theory and computing technology, in order to provide scientific basis for popularization and application of this mechanism.
stepping motion; intermittent mechanism; roller chain; mechanisms
1001-2265(2016)04-0041-02DOI:10.13462/j.cnki.mmtamt.2016.04.011
2015-06-09;
2015-07-14
刘艳秋(1971—),女,黑龙江伊春人,大连工业大学副教授,研究方向为机械设计,(E-mail)dlqiu@163.com。
TH132;TG506
A