移动式温室风幕静电施药平台设计及试验
2016-10-27邱威冯超韩如锦冯学斌孟沛冰王孚康
邱威,冯超,韩如锦,冯学斌,孟沛冰,王孚康
(1. 南京农业大学工学院,江苏 南京210031;2. 南京农业大学灌云现代农业装备研究院,江苏 连云港 222200)
移动式温室风幕静电施药平台设计及试验
邱威1,2,冯超1,韩如锦1,冯学斌1,2,孟沛冰1,王孚康1
(1. 南京农业大学工学院,江苏 南京210031;2. 南京农业大学灌云现代农业装备研究院,江苏 连云港 222200)
针对传统温室人工施药时,药量分配不均匀、农药大量浪费的现象,探索温室施药的新方式,以提高农药利用率和作业效率。根据温室作业环境,研制一种适应于温室的风幕式静电施药机具,确定整机结构方案及关键部件技术参数。以出口风速为试验变量参数,以覆盖率、沉积量、覆盖率均匀度和沉积量均匀度为评价指标,分析了出口风速参数对施药效果的影响。综合流体力学和机械设计知识,计算确定出风口间距0.5 m,出风口半径0.012 5 m,风机功率3 kW。实现了风送、喷雾量和喷雾高度可调,出口风速0-35 m/s可调,喷头流量0.2-1.0 L/min可调,喷雾高度1.15-1.95 m可调。试验结果表明,出口风速为25 m/s时,相对于其他风速,沉积量和覆盖率达到较好的值,均匀度分别稳定在85%和75%。与传统人工施药相比,风幕式静电施药的雾滴穿透性高,分散程度高,可避免重复施药和减少农药施用量。同时,合理的气流参数会进一步提高机具施药效果。
温室;风幕;喷雾;均匀度;沉积量;覆盖率
邱威, 冯超, 韩如锦, 冯学斌, 孟沛冰, 王孚康. 移动式温室风幕静电施药平台设计及试验[J]. 农业现代化研究, 2016,37(5): 1001-1007.
Qiu W, Feng C, Han R J, Feng X B, Meng P B, Wang F K. Design and test of air-assisted electrostatics prayer in greenhouse[J]. Research of Agricultural Modernization, 2016, 37(5): 1001-1007.
随着温室在农业生产中推广普及,我国设施农业不断扩大,对生产设施安全和环境保护要求逐渐提高[1]。然而,我国仍广泛使用背负式手动喷雾机,“跑、冒、滴、漏”现象严重,造成病虫害防治效果差、农药利用率低,有效利用率仅20%-30%,无法达到理想防治效果。过量使用农药,容易对土壤造成污染,以及农产品中农药残留超标、病虫害产生抗药性等问题[2]。所以,急需发展温室施药技术水平,解决施药效率低、污染严重等问题。
目前,国内外许多科研单位为研制自动化程度高、系统操作简单的施药机器做了大量的工作,并取得了一些成果[3-6]。但研制的施药机械成本较高,多停留在实验室阶段,实用性和推广受限,与现实应用需求有较大的差距。风幕技术于20世纪末在欧洲兴起,喷头上方采用强制送风形成风幕,不仅增大了雾滴穿透力,而且有效减免了自然风下雾滴漂移现象,可节省药液20%-60%[7-8]。静电在均匀、细化雾滴及提高雾滴在目标物的沉积量、均匀性、吸附性等方面有明显效果 。因此,本文根据我国温室环境及作业特点,采用风送、静电喷雾等施药技术,设计和开发移动式温室风幕静电施药平台,探讨风幕式喷雾出口风速对施药效果的影响,为机具设计和参数调控提供依据。
1 整机结构与原理
1.1整体结构与参数
机具主要由车架、风幕辅助系统、静电系统、高度调节组件等组成(图1)。常规温室内过道宽度为0.8-1.2 m,温室蔬菜高度在0.15-1.0 m,植株间距离在0.2-0.55 m。为了保证施药机有良好的轮廓通过性,秉承农机与农艺相结合的原则,设定机具轮距为0.6 m,高度调节范围为1.15-1.95 m,主要技术参数见表1。
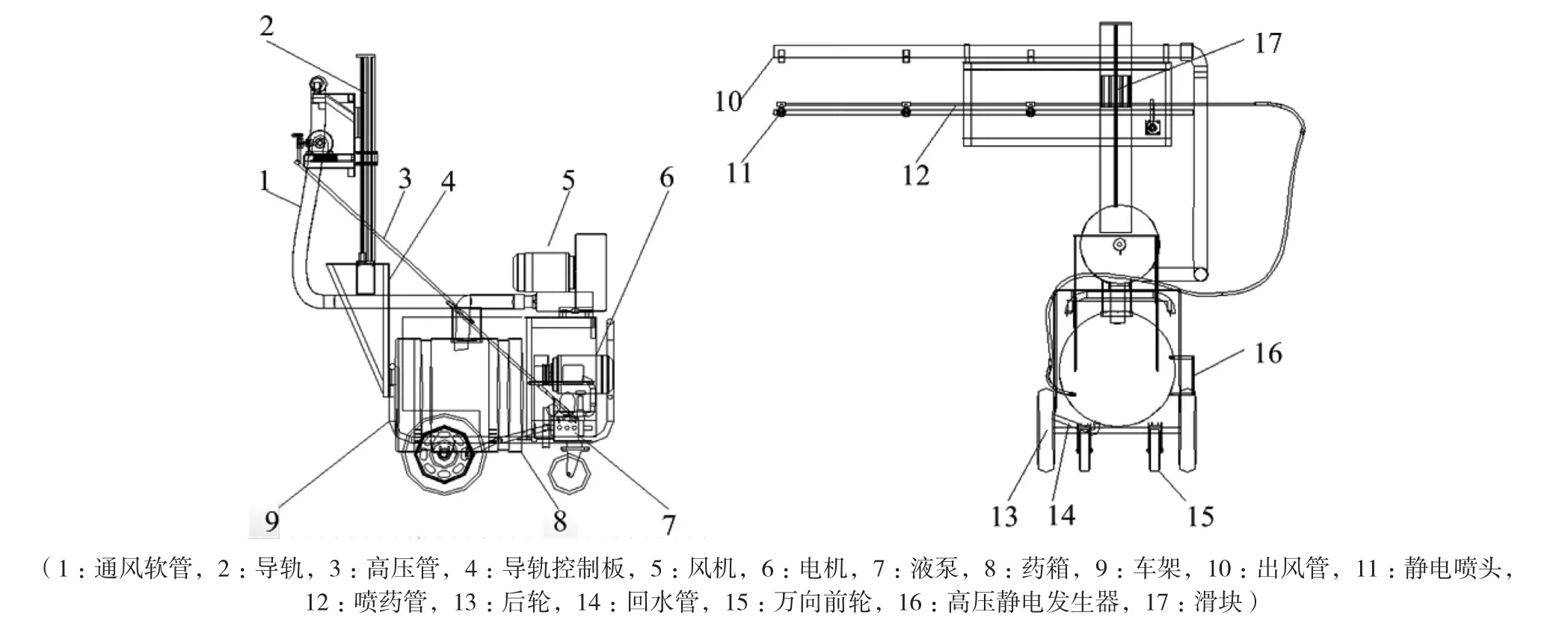
图1 温室风幕式喷雾机结构简图Fig. 1 Structure diagram of air-assisted electrostatic sprayer
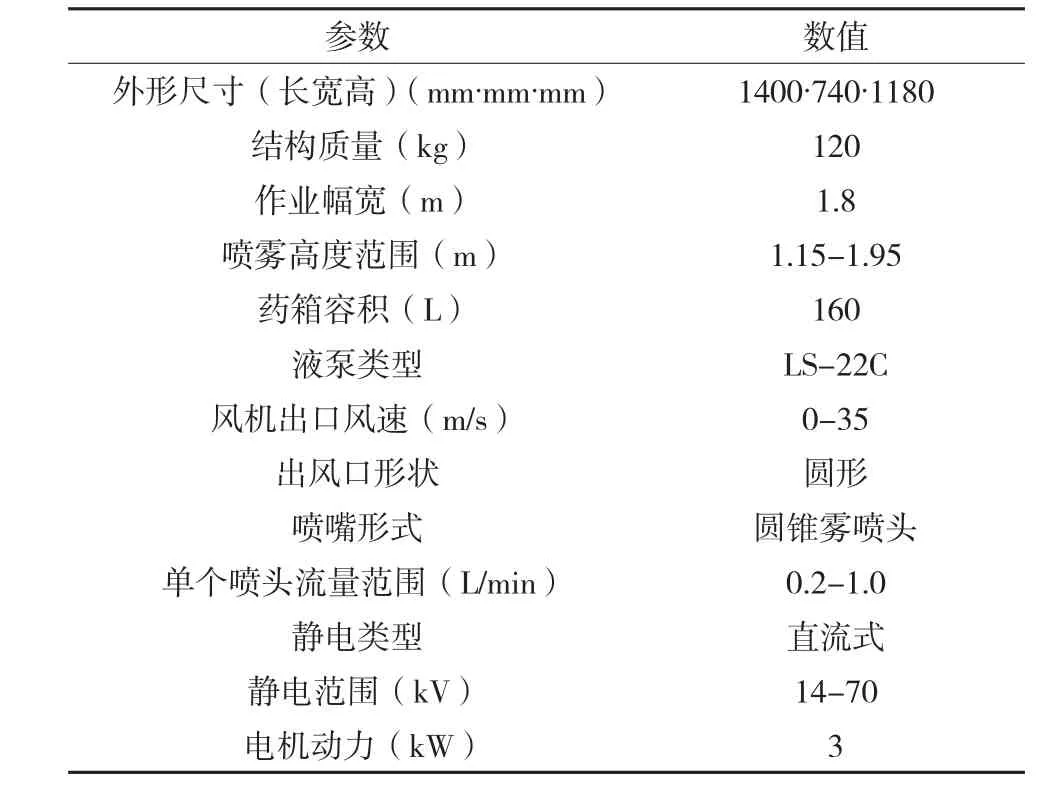
表1 喷雾机参数Table 1 Parameters of air-assisted electrostatic sprayer
1.2工作原理
喷雾机工作时,电机通过皮带轮组驱动液泵,一部分药液从药箱经高压管输送至高压静电喷头,另一部分药液经过回水管回流到药箱内,起到了调节压力和搅拌的作用。同时,可以通过调控风机出口风速、静电电压、喷雾压力,出风口距地高度等参数,使机具适应于不同作业环境与对象。
2 关键部件及其主要参数
2.1风送系统
2.1.1出风口间距的计算 气流能显著提高雾滴穿透性与分散度,对施药效果有较大的影响。气流从管口、孔口、狭缝射出,或靠机械推动,并同周围流体掺混的一股流体流动,形成射流。按射流出口的断面形状,可分为圆形射流、平面射流、矩形射流等。本文结合静电喷头的形状,选择圆形出风口。若要气流覆盖喷杆下方的全部植株(图2),即出风口到达射流交界处的距离不小于出风口到达植株顶部的距离。即:

式中:f为出风口间距(m),S为风口到达植株顶部的距离(m),θ为射流极角,即射流边界延长线的半顶角度。各参数取值范围为:S=(0.5-1.0) m[11],因出风口为圆柱形管,则取θ=14.5°[12]。当风口到达植株顶部的距离取1 m时,将上述参数代入式(1)中,求得出风口间距f不大于0.517 m,取0.5 m。
图2 多喷头射流覆盖面Fig. 2 The coverage region of multi-nozzle jet
2.1.2风机的选择 置换原则是风送喷雾机风量计算中普遍采用的一种方法[13]。其原理是喷雾机风机吹出带有雾滴的气流,应能驱除并完全置换出风口下方直至植株的空间所包容的全部空气。如果喷雾机作业时,其风机转速和行进速度不变,根据置换原则的原理(图3),这时风机风量稍大于射流覆盖体积。即:

式中:Q为风量(m3/s),R为覆盖面的半径(m),v为喷雾机作业速度(m/s),S为风口到达植株顶部的距离(m),K为气流衰减和沿途损失系数。各参数的取值范围为:v=(0.25-0.5) m/s、R=f /2、S=(0.5-1.0) m、K=(1.3-1.6)[12],因风送距离较近取K=1.3。将上述参数代入式(2)中,求得风量Q=(0.49-1.48)m3/s。根据风量选择型号为HG-3000S的风机[14],功率为3 kW。
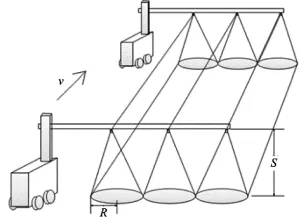
图3 置换原则计算简图Fig. 3 Calculation diagram of replacement principle
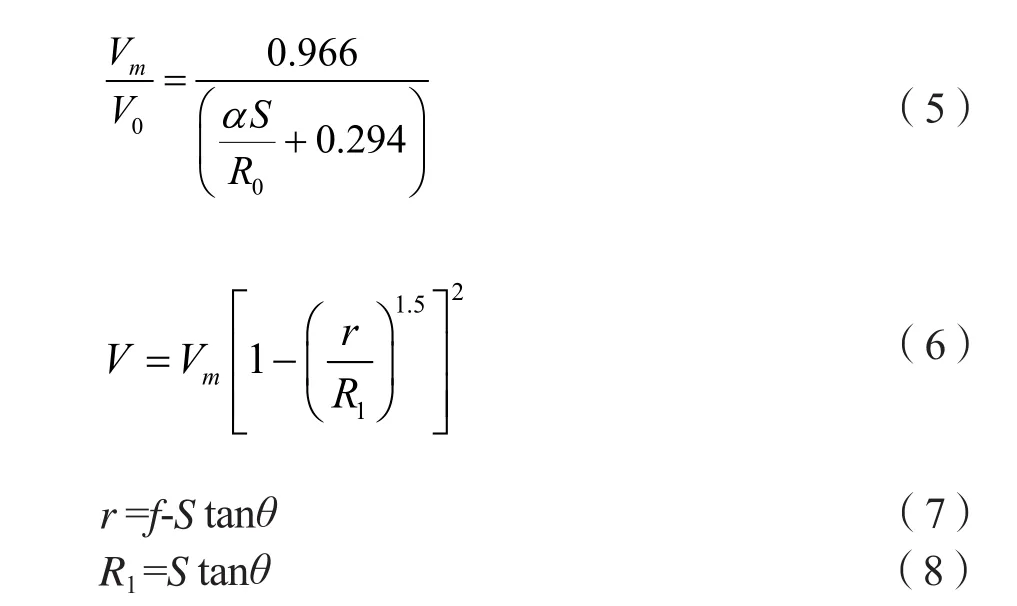
2.1.3出风口直径的计算 喷雾机吹 出气流除了要满足风量的要求,还要遵循末速度原则,即吹出气流到达冠层时,其速度不能低于某一数值,否则气流进不了冠层,影响施药效果。圆形出风口下方形成的是自由淹没射流,射流断面沿射程扩大如图4。对于自由淹没射流,断面半径R1与风口到达植株顶部的距离S的关系为:

式中:θ为射流极角,即射流边界延长线的半顶角度,α为实验系数,主要取决于喷管结构、喷口速度分布的均匀性及喷口受扰动的程度,&为射流出口形状系数,S为风口到达植株顶部的距离(m),R0为出风口半径(m),R1为断面半径(m)。
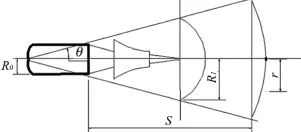
图4 风管自由淹没射流Fig. 4 Free submerged jet of air outlet
当吹动植株时,射流附近的静止的流体会被卷入射流而随之一起运动,即气流携带雾滴进入植株的下层,这样可以起到更好的防虫害的效果。喷雾机作业时,当到达植株的风速为2-3 m/s,植株叶片会翻动,即:
式中:V0为喷口平均流速(m/s),Vm为射流轴线上的流速(m/s),α为实验系数,主要取决于喷管结构、喷口速度分布的均匀性及喷口受扰动的程度,S为风口到达植株顶部的距离(m),V为射流断面上任一点M速度(m/s),r为射流轴线至某点径向距离(m)。各参数的取值范围为:V0=(25-30) m/s、f=0.5 m,因出风口为圆柱形管,α取0.08、θ取14.5°。
到达植株冠层的最小风速为2-3 m/s,风口到达植株顶部的距离为0.5-1.0 m,出风口的最大风速,由式(6)、(7)、(8)得射流轴线上的流速Vm=(2.87-4.30) m/s。将Vm代入式(5)中,求得出风口半径R0=(0.007 9-0.015 0) m,最终取R=0.012 5 m。
2.2静电施药系统
目前,我国温室施药主要使用仍为背负式手动喷雾机。选取几种主流的背负式手动喷雾机,进行预喷试验,记录其作业速度与流量。根据背负式手动喷雾机常规作业速度及喷头流量,进而求得风幕式静电喷雾机喷头流量。即:

式中:L1为施药所需行驶的路程(m),v1为手动喷雾机作业速度(m/s),q1为手动喷雾机喷头流量(L/min),q2为风幕式静电喷雾机单个喷头流量(L/min)。各参数的取值范围:q1=(1.0-1.2) L/min,v1=0.2 m/s。将上述参数代入式(9)中,求得单个喷头的流量为0.41-1.0 L/min。所以选用流量0.2-1.0 L/min的感应式静电喷头[15],工作压力为0.1-0.5 MPa。
2.3高度调节系统
高度调节系统包括电源开关、步进电机电源S-400-60、MS-25-24电源、控制器汇结板、控制调节器、86步进电机驱动器和导轨。根据植株的高度,通过导轨控制板调节出风口和喷头高度,范围为1.15-1.95 m,以便于射流横截面可以覆盖喷杆扫过的植株以及到达植株冠层的风速符合要求。
风幕系统和喷雾系统质量为17.5 kg,而药液流动和气流喷射会产生一定的后坐力,故选用扭矩为12 N·M,最大载重为50 kg的86步进电机传动和专用驱动器2HD8080,控制出风口和喷头的高度。
3 机具性能试验
3.1试验装备及试剂
温室风幕式静电喷雾机,其作业过程包括注水、施药、喷射、风幕、静电等工序。作业幅宽1.8 m,高压静电喷头的单喷头喷雾量0.2-1.0 L/min。风机涡旋式进风出风,功率为3 kW,电压为380 V,额定排气压力0.022 MPa,最大排吸气量420 m3/h,适用于现代温室施药作业,药泵的工作压力调节范围0.1-0.5 MPa。背负式手动喷雾机(SX-LK16C,中国市下控股有限公司),其外形尺寸360×167×497 mm,整机净重3.23 kg,工作压力0.2-0.4 MPa。
丽春红2R,深红色粉末,溶于水呈红棕色至红色溶液,药箱中注入质量分数0.5%丽春红2R水溶液,选用与丽春红试剂对比明显的淡蓝色便签纸采集药液,喷施后采集各样点的便签纸(尺寸7.6 cm×7.6 cm),利用高拍仪(Microtek H-Screen 701,上海中晶科技有限公司)和紫外可见分光光度计(UV-2000,尤尼柯(上海)仪器有限公司)进行图像处理。
3.2试验设计
试验时间:2015年9月。
试验地点:南京农业大学工学院平23实验室。
试验环境:环境温度24 ℃,空气流速0 m/s。
试验对象:绿萝,平均高度0.25 m,行距和株距均为0.3 m。
分别采用手动喷雾机和温室风幕式静电喷雾机施药2种方式。
3.2.1样点布置 试验地分为3个区域,每个区域分为A、B、C三个小区,小区距离为2 m。每个小区设定5个样点(图5)。每个样点分为上、下、地面3层采样,高度分别为0.25 m,0.15 m,0 m,用回形针将叶片夹在两张便签纸中间,对每点选定的叶片做上标记,确保每次选定的位置为同一位置。区域中的实验轨道长度为10 m,有效工作长度为8 m。
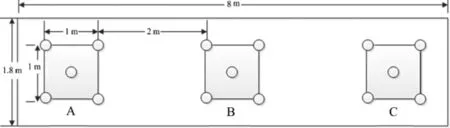
图5 采样点布置示意图Fig. 5 Arrangement of sample points in the canopy
3.2.2参数设置 为了保证两种施药方式的喷施药量相同,结合已测喷头的流量,计算得到两种施药方式的行进速度。手动喷雾机喷头流量为1 L/min,由经验丰富的工人以0.2 m/s的速度匀速前进并完成喷施作业。风幕式静电施药机单个喷头流量为0.6 L/min,共计3个喷头,行驶速度设置为0.36 m/s,出风口距植株顶部为0.8 m,静电电压为20 kV[16],压力为0.3 MPa[17]。通过喷施0.5%的丽春红溶液,采集用于承接雾滴的标签纸,带回实验室进行图像统计和雾滴沉积分析,得到单位面积雾滴覆盖率和沉积量[18]。
考察风幕式静电施药机出口风速对雾滴沉积覆盖影响时,通过改变进、出风口面积实现4种不同风速(0 m/s,15 m/s,25 m/s,35 m/s)的设置。在喷施药量一定的情况下,以植株上下层的药液沉积量、覆盖率和均匀度等为评价指标,探寻适宜的出口风速参数。
3.2.3施药均匀性的统计方法 为了更加准确评价施药方式和风幕式静电喷雾机的出口风速对施药效果的影响,在统计雾滴覆盖率和沉积量的基础上,引入施药均匀性。本文根据方差计算原理提出了均匀度计算公式,用于评价风幕式喷雾机施药的均匀性(CU,%)[19]:

3.3结果分析
3.3.1施药方式对雾滴沉积覆盖的影响 风幕式静电喷雾机施药的上下层叶片正反面的覆盖率都优于人工施药。与上层相比,下层的覆盖率增加更为明显(表2)。原因是风幕式喷雾机气喷头垂直向下,气流提高雾滴穿透性,药液相对于手动喷雾机更容易到达植株下层。人工施药时,叶片背面的覆盖率过小,不适应喜阴病虫害的防治,需要加大喷量。

表2 不同施药方式的施药效果的比较Table 2 Application effect using different sprayers
对于施药效果的评价,目前多采用平均覆盖率和沉积量等指标。但是对于病虫害防治来说,药液喷施不均很容易导致病虫害复发。所以,本文根据样点的覆盖率和沉积量,计算求得覆盖率均匀度和沉积量均匀度指标,用来评价施药机具的施药均匀效果。
风幕式静电喷雾机施药时,上下两层的正面覆盖率均匀度和沉积量均匀度分别为79.99%和88.69%,81.78%和79.24%;手动喷雾时,上下两层的正面覆盖率均匀度和沉积量均匀度分别为39.85%和80.68%,87.10%和83.90%(表2)。风幕式静电喷雾机的覆盖率均匀度明显大于人工施药方式。因为手动喷雾机喷头是人工手动操作的,没有固定的路线,在施药过程中有一定随机性,多靠加大喷量来保证施药效果。而风幕式静电喷雾机施药时,多喷头按照固定路线同时工作,喷量、作业状态稳定。相比较手动喷雾机而言,风幕式静电施药能保证各样点都有较好的沉积覆盖,同时,覆盖率均匀性与沉积量均匀度也有明显提升。
3.3.2出口风速对雾滴沉积覆盖影响 从上层的沉积量比较来看,沉积量随着出口风速增大而增大,当超过一定值后,又开始减小,即出口风速为35 m/s的沉积量小于出口风速为25 m/s。从下层的沉积量比较来看,出口风速从0 m/s到25 m/s是沉积量稳定在2 μg/cm2,而出口风速为35 m/s时,沉积量达到了2.82 μg/cm2(表3)。原因是药液从喷头出来时,有一定的速度,风速过小时,有部分药液不会随风幕吹向植株,从而流失,风速过大时,部分药液随风幕直接到达下层植株或是到达地面,从而风速到达一定值时,继续增加,沉积量会下降。从覆盖率角度分析,出口风速对叶片正面的覆盖率影响较大,对叶片反面影响较小。由于叶片正面直接面对气、雾流,而叶片反面雾滴沉积多由气流对枝叶的翻转作用而产生,而本试验作物叶面积指数较大,难以形成有效枝叶翻转,所以最好通过多角度气流喷施增加枝叶扰动程度。结合沉积量和覆盖率时,发现当出口风速为25 m/s和35 m/s时,上层的沉积量和覆盖率都较大,分别为6.05%和4.16 μg/cm2,7.86%和3.10 μg/cm2。而出口风速为0时,沉积量小,即叶片附着的药液少,即使覆盖率很高,防虫害效果也不是很理想。当出口风速为15 m/s,上下叶片背面的覆盖率仅为0.09%,0.06%,不能满足施药要求。
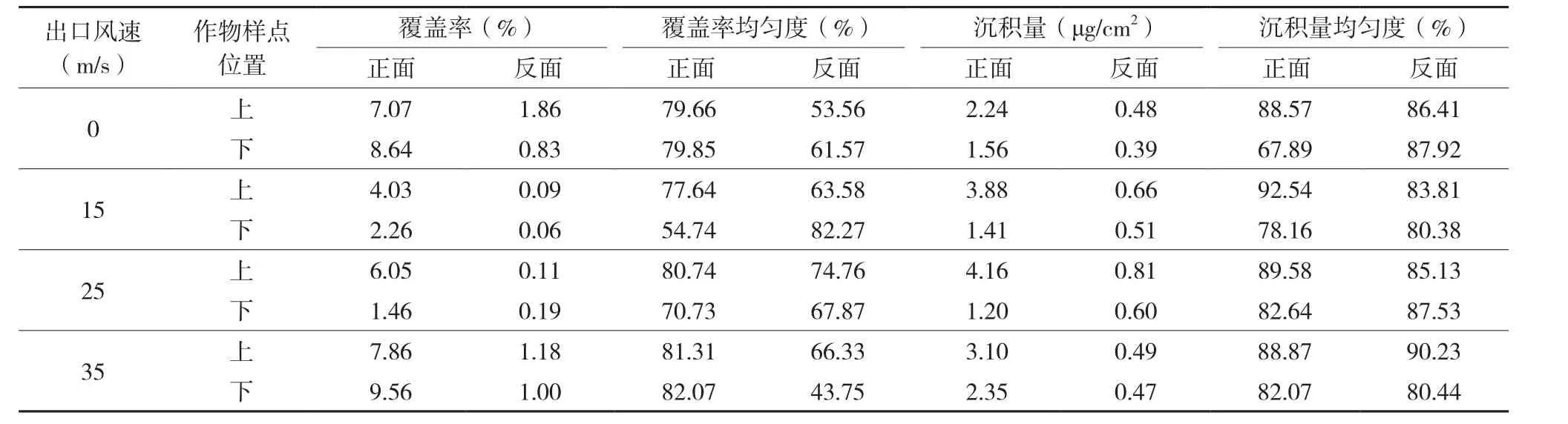
表3 风幕式静电施药机不同出口风速的施药效果Table 3 Application effect of air-assisted electrostatic sprayer under different outlet air velocities
从表3得出:在施药沉积量和覆盖率都较好的条件下,出口风速为25 m/s和35 m/s时的上下的正反沉积量均匀度分别为89.85%,85.13%,82.64%,87.53%和88.87%,90.23%,82.07%,80.04%。这组数据说明了在沉积量高的同时,施药的均匀性也比较好,即每个叶片沉积量相差不大。对于出口风速为0 m/s和15 m/s时,其中层的正面沉积量均匀度分别为67.89%和78.16%,相对于88.57%和92.54%较小,每个叶片的沉积量相差较大,即施药的均匀性较差。因为出口风速增大,雾滴二次雾化和分散程度都较高,药液较为均匀散步在叶片表面;而当出口风速为0或15 m/s时,气流量不足导致分散程度不高,雾滴集聚现象严重,影响了均匀性。3.3.3 出口风速对漂移的影响 在施药过程中,药液的漂移量也是重要的评价指标。出口风速为0 m/s,15 m/s,25 m/s,35 m/s时,其地面沉积量分别为2.49 μg/cm2,0.56 μg/cm2,0.72 μg/cm2,1.21 μg/cm2(表4)。当出口风速为零时,地面沉积量最大,原因可能是没有风吹动植株,植株间的间隙较大,药液更容易到达地面,所以下层的沉积量较大。当有出口风速时,随着出口风速增大,地面的沉积量增加,原因是有风吹动植株时,植株叶片晃动,而且气流将液滴细化,更容易吸附叶片,即出口风速为15 m/s时,地面的沉积量只有0.56 μg/cm2。随着风速的增加,气流中的液滴穿透力变强,即下层的沉积量变大。出口风速为0 m/s,15 m/s,25 m/s,35 m/s施药时,其总沉积量(上下层的正反沉积量之和×样点数×便签纸面积,样点数为9)分别为2 427.65 μg,3 358.17 μg,3 519.32 μg,3 332.17 μg。出口风速在一定范围内增大,随气流一起定向运动的雾滴增多,即漂移的雾滴就减少。而出口风速超过一定范围后,雾滴随气流吹到地面上,即漂移量增加。由上可得,在相同的施药量情况下,总沉积量越大,漂移量越小,所以出口风速为25 m/s时的漂移量最小。

表4 不同出口风速的喷雾漂移量Table 4 Spray drift of air-assisted electrostatic sprayer under different outlet air velocities
4 结论
本文探索温室药械与施药技术的新方式,设计了一种适用于温室环境的风幕式静电喷雾机。相比较传统人工施药,有较好的施药均匀性。喷施冠高30-40 cm、叶面积指数4.5-5.5的温室作物,出口风速为25 m/s,有较好的施药效果。合理的气流速度可以提高雾滴的穿透性和分散程度,同时也可以限制雾滴地面漂移。
通过提取温室作业环境参数,应用流体力学知识,探讨基于作业环境参数的温室风幕式静电施药机具的设计思路与方法,为温室风幕静电施药提供了理论基础与依据。目前仅探讨出口气流速度与喷雾效果的关系,还需进一步分析药量、静电电压等参数对施药效果的影响规律,从而提高喷施作业时的农药利用率,节约农药用量。
[1] 莾路, 祁力钧, 冀荣华, 等. 温室自动变量施药系统设计[J].中国农业大学学报, 2009, 14(4): 114-118.
Mang L, Qi L J, Ji R H, et al. Design of variable rate spray system in greenhouse[J]. Journal of China Agricultural University, 2009,14(4): 114-118.
[2] 周良富, 张玲, 丁为民, 等. 风送静电喷雾覆盖率响应面模型与影响因素分析[J]. 农业工程学报, 2015, 31(S2): 52-59.
Zhou L F, Zhang L, Ding W M, et al. Droplet coverage response surface models and influencing factors of air-assisted electrostatic spray[J]. Transactions of the Chinese Society of Agricultural Engineering, 2015, 31(S2): 52-59.
[3] 梅银成, 祁力钧, 冀荣华,等. 温室自走式弥雾机远程控制系统的设计与试验[J]. 中国农业大学学报, 2015, 20(1): 170-175.
Mei Y C, Qi L J, Yi R H et al. Design and experiment of remote control system of greenhouse self-propelled mist sprayer[J]. Journal of China Agricultural University, 2015, 20(1): 170-175.
[4] 张燚洺. 设施农业喷雾机器人的研究及仿真分析[D].长春: 吉林大学, 2015.
Zhang Y M. Kinematic analysis and simulation of spray robot in facilities agriculture[D]. Changchun: Jilin University, 2015.
[5] 耿长兴, 张俊雄, 曹峥勇, 等. 温室黄瓜病害对靶施药机器人设计[J]. 农业机械学报, 2011, 42(1): 177-180.
Geng C X, Zhang J X, Cao Z Y, et al. Cucumber disease toward-target agrochemical application robot in greenhouse[J]. Transactions of the Chinese Society for Agricultural Machinery,2011, 42(1): 177-180.
[6] Julián S H, Víctor J R, Francisco P, et al. Comparative spray deposits by manually pulled trolley sprayer and a spray gun in greenhouse tomato crops[J]. Crop Protection, 2012, 31: 119-124.
[7] 袁会珠, 杨代斌, 闫晓静, 等. 农药有效利用率与喷雾技术优化[J]. 植物保护, 2011, 37(5): 14-20.
Yuan H Z, Yang D B, Yan X J, et al. Pesticide efficiency and the way to optimize the spray application[J]. Plant Protection, 2011,37(5): 14-20.
[8] 李良.温室轨道风送施药系统设计[D]. 太原: 太原理工大学,2015.
Li L. System design for rail air-assisted spraying in greenhouse[D]. Taiyuan: Taiyuan University of Technology, 2015.
[9] 刘丰乐, 张晓辉, 马伟伟, 等. 国外大型植保机械及施药技术发展现状[J]. 农机化研究, 2010, 32(3): 246-248.
Liu F L, Zhang X H, Ma W W, et al. Current development status of foreign big-scale protection machinery and application technology[J]. Journal of Agricultural Mechanization Research,2010, 32(3): 246-248.
[10] 刘建, 吕新民, 党革荣, 等. 植保机械的研究现状与发展趋势[J].西北农林科技大学学报, 2003, 31(S1): 202-204.
Liu J, Lü X M, Dang G R, et al. Status quo and development tendency of plant protection equipment[J]. Journal of Northwest A&F University, 2003, 31(S1): 202-204.
[11] 贾卫东, 李成, 王贞涛, 等.高沉积静电喷雾装置试验研究[J].排灌机械工程学报, 2012, 30(2): 244-248.
Jia W D, Li C, Wang Z T, et al. Experimental study on electrostatic spraying device with better deposition[J]. Journal of Drainage and Irrigation Machinery Engineering, 2012, 30(2): 244-248.
[12] 罗惕乾, 陈兆学, 谢永耀. 流体力学[M]. 北京: 机械工业出版社, 2007.
Luo T Q, Chen Z X, Xie Y Y. Hydrodynamics[M]. Beijing: China Machine Press, 2007.
[13] 邱威, 丁为民, 汪小旵, 等. 3WZ-700型自走式果园风送定向喷雾机[J]. 农业机械学报, 2012, 43(4): 26-30.
Qiu W, Ding W M, Wang X C, et al. 3WZ-700 Self-propelled airblowing orchard sprayer[J]. Transactions of the Chinese Society for Agricultural Machinery, 2012, 43(4): 26-30.
[14] 张展. 风机和压缩机设计与应用[M]. 北京: 机械工业出版社,2015.
Zhang Z. Design and Application of Fan and Compressor[M]. Beijing: China Machine Press, 2015.
[15] 张瑞, 周一届. 感应式静电喷头设计与实验研究[J]. 农机化研究, 2013, 35(1): 181-183.
Zhang R, Zhou Y J. Design and experimentation research on electrostatic induction nozzle[J]. Journal of Agricultural Mechanization Research, 2013, 35(1): 181-183.
[16] 韩树明. 静电喷雾技术在植保领域的应用[J]. 农机化研究,2011, 33(12): 249-252.
Han S M. Application of electrostatic spray technology in the field of the plant protection[J]. Journal of Agricultural Mechanization Research, 2011, 33(12): 249-252.
[17] 李宝珍, 张运丰. 感应式静电喷头喷嘴: 中国, B05B5/025[P]. 2012-09-26.
Li B Z, Zhang Y F. The nozzle of electrostatic induction sprayer: China, B05B5/025[P]. 2012-09-26.
[18] 邱威, 顾家冰, 丁为民, 等. 果园风送式施药雾滴在冠层内沉积分布规律[J]. 扬州大学农业与生命科学版, 2015, 36(2): 68-72.
Qiu W, Gu J B, Ding W M, et al. The droplet deposition distribution in fruit canopy using air-assisted sprayer[J]. Journal of Yangzhou University (Agricultural and Life Science Edition),2015, 36(2): 68-72.
[19] 李久生, 杜珍华, 栗岩峰. 地下灌溉系统施肥灌溉均匀性的田间试验评估[J]. 农业工程学报, 2008, 24(4): 83-87.
Li J S, Du Z H, Li Y F. Field evaluation of fertigation uniformity for subsurface drip irrigation systems[J]. Transactions of the Chinese Society of Agricultural Engineering, 2008, 24(4): 83-87.
(责任编辑:童成立)
Design and test of air-assisted electrostatics prayer in greenhouse
QIU Wei1,2, FENG Chao1, HAN Ru-jin1, FENG Xue-bin1,2, MENG Pei-bing1, WANG Fu-kang1
(1. College of Engineering, Nanjing Agricultural University, Nanjing, Jiangsu 210031, China; 2. Guanyun Institute of Modern Agricultural Equipment, Nanjing Agricultural University, Lianyungang, Jiangsu 222200, China)
In order to solve the problem of low efficiency utilization and non-uniform distribution of pesticide with traditional application sprayer in the greenhouse, a new spray model was investigated to improve the utilization rate of pesticide. According to the greenhouse environment, an air-assisted electrostatic greenhouse sprayer was designed which employed air-assisted and electrostatic technology. Coverage, deposition, and spray uniformity were used as indexes to research the effects of outlet air velocities on pesticide deposition in greenhouse. Based on the theory of the hydromechanics and mechanical design, structure parameters of the sprayer were determined according to: the interval between the air outlets was 0.5 m, the radius of the outlet was 0.012 5 m and the power of the fan was 3 kW. The outlet air velocity, spray amount and spray height could be adjusted within the range of 0-35 m/s, 0.2-1.0 L/min and 1.15-1.95 m respectively. Test results showed the optimum effect was obtained when the outlet air velocity is 25 m/s, under which deposition and coverage uniformity were steady at 85% and 75% respectively. Compared with the traditional manual spray pattern, air-assisted electrostatic spray model could achieve high penetrability and dispersion of droplets, which could avoid repeat spray and reduce amount. In addition, the spray effect could be improved under reasonable outlet air velocities.
greenhouse; blowing curtain; spray; uniformity; deposition; coverage
Jiangsu Union Innovation Foundation (BY2013050); The Fundamental Research Funds for the Central Universities (KYZ201557);Science and Technology Develop Project for Northern Jiangsu (BN2013051).
QIU Wei, E-mail: qiuwei@njau.edu.cn.
5 December, 2015;Accepted 13 May, 2016
S491
A
1000-0275(2016)05-1001-07
10.13872/j.1000-0275.2016.0056
江苏省产学研联合创新基金—前瞻性联合研究项目(BY2013050);中央高校基本科研业务费专项资金项目(KYZ201557);苏北科技发展计划—科技富民强县项目(BN2013051)。
邱威(1984-),男,江苏徐州人,博士,讲师,主要从事植保机械与施药技术研究,E-mail: qiuwei@njau.edu.cn。
2015-12-05,接受日期:2016-05-13