基于三维激光扫描仪和SkechUp的建筑物三维建模应用研究*
2016-10-27陈冲林
王 瑞,陈 联,陈冲林
(1.新疆石油工程设计有限公司,新疆 克拉玛依 834000; 2.云南省地矿测绘院,云南 昆明 650218)
基于三维激光扫描仪和SkechUp的建筑物三维建模应用研究*
王瑞1,陈联1,陈冲林2
(1.新疆石油工程设计有限公司,新疆 克拉玛依834000; 2.云南省地矿测绘院,云南 昆明650218)
结合天宝TX8三维激光扫描仪在建筑物三维建模中的应用,说明该三维激光扫描仪在外业数据采集中的注意事项,并对如何将建筑物轮廓特征信息传输到SkechUp软件中进行建模、贴图、渲染、动态视频制作进行了探讨,提出了一套基于三维扫描仪和SkechUp的建筑物三维模型快速重建方法。
三维激光扫描技术;SkechUp;三维建模;TSE;特征提取;动态视频制作
0 引言
三维激光扫描技术因其在测量中能将各种物体表面的点云数据快速、准确地测量并记录到计算机中,且在记录位置信息的同时记录物体表面反射率,使重构的三维实体更加生动,而经常被用于逆向工程测量、建筑设计与仿真、建筑物三维建模与变形监测、建筑复原和维护分析、景观三维测量等与工程建设相关的众多领域[1]。而其中的三维建模技术是在计算机中建立表达客观世界的虚拟现实的关键技术。
本文以天宝TX8三维激光扫描仪为例,主要探讨点云数据处理和三维建模的关键技术,提出了一套行之有效的建筑物三维模型快速重建方法。
1 仪器简介
天宝TX8三维激光扫描仪测距精度<2 mm,测角精度为16″,最大测程为120 m(可升级到340 m),扫描速度为50万点/s,可以结合随机软件RealWorks,第三方提供的SkechUp专业建模软件,用于SkechUp的TSE(Trimble scan explorer)(2014年4月发布)扩展插件,V-Ray for SkechUp渲染插件、Photoshop图像处理软件等,使用到三维建模中来。
2 技术路线
本文以某办公楼和相对的宿舍楼为目标,说明三维激光扫描技术结合SkechUp的TSE插件进行建筑物三维模型重建的技术方案,包括外业数据采集和内业数据处理。其中外业数据采集包括测站设置、仪器参数设置、点云数据拼接方法的选择、标靶的摆放等环节;内业数据处理方面,因为有了TSE扩展插件的帮助,极大地缩短了建模时间,简化了数据预处理的难度,提高了三维建模的效率。该插件包含一个简单易用的边缘提取工具,可以迅速提取构造点和构造线,用户可以方便的把扫描数据中解读到的重要信息应用到建模过程中。结构性边线作为参考线被引入到SkechUp中,能够快速形成结构外壳,省去点云数据处理中繁琐的数据缩减、数据分割及分类等工作,直接进行模型的构建。因此内业数据处理主要有数据配准、点云滤波、特征提取、模型的构建、纹理贴图和模型渲染。
其技术流程,如图1所示。

图1 基于三维激光扫描仪和SkechUp的建筑物三维建模技术流程Fig.1 Building 3D modeling process based on 3D laser scanner and SkechUp
3 三维激光扫描仪外业数据采集
3.1测站设置
依据制定的扫描技术方案,在充分考虑三维激光扫描仪作业半径和测量效率的基础上,科学的设置站点。在需要标靶的情况下,要注意标靶和测站间的距离是否满足观测要求,在标靶上采集的点云数据密度是否能被随机软件识别。各站扫描结束后,在扫描仪液晶屏上浏览点云压缩图像,查阅各标靶点是否清晰可见,对于模糊不清的标靶,可以在液晶屏上框选扫描范围,设置更高的扫描密度,以更高的分辨率重新扫描标靶点。如不需要标靶,则要保证两站之间扫描的点云数据重复率达到30%~40%以上,以方便随机软件进行点云的自动拼接。
3.2仪器参数设置
测站安置好后,打开扫描仪电源,初始化结束后,对扫描仪进行对中整平,然后在扫描仪液晶屏上进行扫描参数设置,主要包括新建工程、扫描密度、扫描精度、扫描距离、温度和气压参数等。其中扫描密度和扫描距离要依据现场实际情况而定,扫描精度要与测量技术设计文件相符。
3.3标靶的摆设
放置标靶时应注意:
1)标靶能够被良好识别,不要被物体遮挡;
2)从测站角度来看,标靶不能在一条直线上,否则会影响点云拼接精度;
3)安放位置要确保稳定;
4)标靶之间最好有明显的高差。
依据点云拼接的方法不同,所需标靶的数量也不同,但每站必须保证有3个以上标靶能够被扫描仪清晰的识别,如果有条件,可以多配置些标靶,多余的标靶不仅可以用来检核点云拼接精度,还可以为下一站的扫描工作节约时间,扩大扫描范围[2]。
4 三维激光扫描仪内业数据处理
4.1数据配准
采用标靶拼接的方法使点云数据在随机软件RealWorks中自动配准,首先在扫描两站的公共区域放置3个或3个以上的球形标靶,对目标区域进行扫描,得到扫描区域的点云数据,测站扫描完成后再对放置于公共区域的标靶进行精确扫描,以防止数据预处理时出现标靶无法识别导致数据无法拼接的情况发生。依次完成各测站的扫描工作,直至覆盖到整个测区为止。在外业扫描时,每一个标靶对应一个ID号,需要注意同一个标靶在不同测站中的ID号必须要一致,才能完成拼接。野外数据采集完成后对各测站点云数据进行拼接。
点云数据自动配准结束后,RealWorks软件可以自动弹出拼接窗口来查看拼接误差精度等信息,实践证明,该方法拼接精度较好,一般小于1 cm。建筑物拼接好的点云效果图,如图2所示。
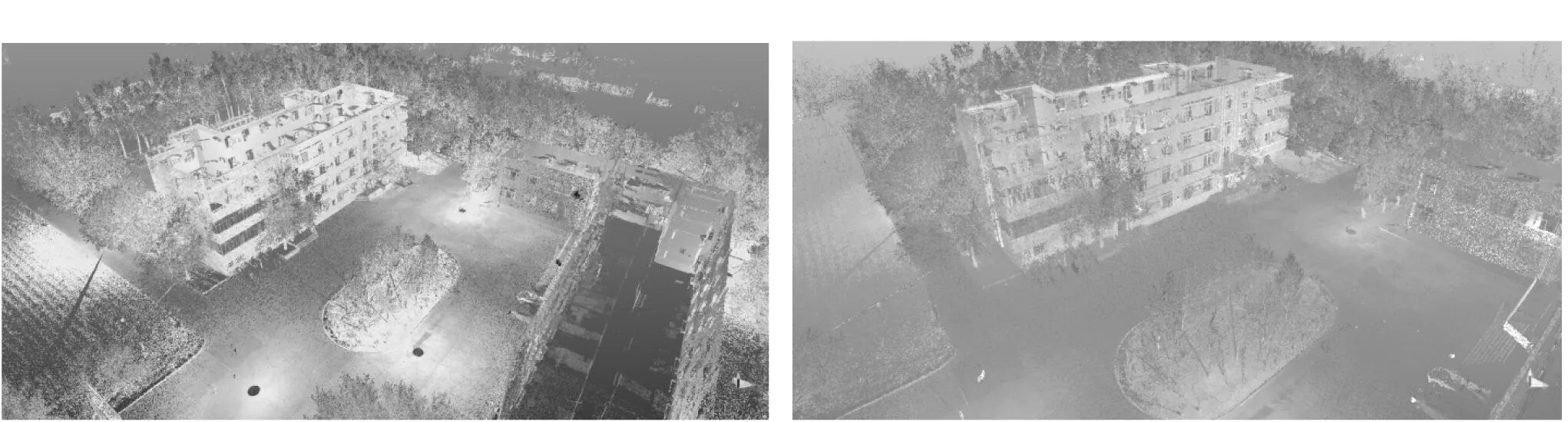
图2 拼接好的点云效果图Fig.2 Stitching a good point cloud effect Chart
4.2点云滤波
点云数据中的噪声点一般由两方面原因引起:
1)外界自然环境引起,如高于地面的植被和房屋、空气中的灰尘或水蒸气、测区范围内行驶的车辆或行走的人员等障碍物造成的遮挡。
2)由扫描仪自身的硬件设备引起,如激光接收器在接受反射光时发生折射或散射,扫描仪滤光镜在旋转时因吸附污垢而产生的噪声数据,控制电路板在电路传输中产生的随机噪声,微电脑、CCD相机内部产生的热噪声、电噪声等[3]。
对第一种原因产生的明显远离点云中心的异常点和杂散点的处理方法是通过肉眼判别直接人工删除。第二种原因产生的噪声数据,肉眼无法将其与正确的点云数据快速区分开,因此需要通过高斯滤波、中值滤波、均值滤波等方法进行平滑处理。在这几种处理方法中,高斯滤波因其能够较好地保留特征点,处理整体效果较好而被优先用于点云数据去噪。
本文主要利用随机软件RealWorks中基于地形和灰度的两种滤波方式,采用人机交互的方式完成去噪工作。
4.3特征提取
利用TSE插件和拼接好的点云数据,采取人机交互的方式,可以方便的在各测站的点云压缩图像上提取特征点、线、面等轮廓信息,然后将这些特征信息准确的相对位置关系传输到SkechUp中,再在SkechUp中进行建模、贴图、渲染等操作。大大提升了从庞大点云数据中提取建筑物特征信息的效率,也解决了因数据量大、电脑配置不足而导致建模或运行速度低下的问题。图3为在TSE中提取的特征线,图4为将特征线传输到SkechUp中。

图3 利用TSE提取特征线 图4 引入到SkechUp中的特征线 图5 建筑物三维模型的构建Fig.3 Using TES to extract characteristic lines Fig.4 Feature lines introduced into SkechUp Fig.5 Construction of building 3D model
4.4模型的构建
本模型的构建主要在SkechUp中完成,SkechUp软件有着丰富的组件资源,能让设计者更加直观地进行框架构思,操作风格简洁、命令简单易懂。根据传输到SkechUp中的轮廓特征信息,利用该软件中的推拉、复制、路径跟随等命令和其强大的插件扩展功能,对建筑物楼梯、门窗、墙体以及其它复杂的几何体进行1∶1三维建模工作。图5为办公楼和宿舍楼模型的构建。
4.5纹理贴图
纹理贴图是还原真实三维模型的关键一步。经过前面步骤得到的三维模型,已经具有较好的几何精确性,但是为了满足可视化的需要,还原真实的三维景观,还需要采用纹理贴图技术对三维模型添加真实的色彩。纹理贴图就是模拟景物表面纹理细节,用图像来代替物体模型中的细节,提高模拟逼真度和系统显示速度。三维模型的细节如果都用三维模型来表示,将大大增加模型的数据量以及复杂度,对于系统的运行速度也有较大的影响。通过纹理贴图的方法模拟出这些细节,既解决了细节模拟问题,还兼顾了系统对速度和模型对逼真度的要求。
纹理的获取采用现场拍照的方式,并通过实地采集建筑物的外观影像,以及利用Photoshop等图像处理软件,实现由普通照片到可用纹理图片的转变,进而实现了建筑物三维模型的可视化。凭借着SkechUp丰富的3D模型组件资源,它对构建的建筑物主体三维模型起到了很好的装饰和点缀的作用,使模型更加生动、真实和美观。图6为进行纹理贴图后的办公楼和宿舍楼三维模型。

图6 纹理贴图后的建筑物三维模型Fig.6 Building 3D model after texture mapping
4.6模型渲染
纹理贴图完成后,为生成更加真实贴切的三维模型效果图,可以对模型进行渲染。本模型采用的是V-Ray for SkechUp渲染插件,该插件可以对SkechUp中的贴图材质进行编辑,通过调节材质的反射参数、贴图属性以及场景的物理相机、光源属性、环境设置等参数,对所需的三维视角画面进行渲染并输出。然后再利用Photoshop图像处理软件对所输出的图像进行后期的加工处理,通过对图像进行色阶、模糊、柔光、叠加等处理后,最终生成更加真实、照片级的三维模型效果图。图7为通过渲染后的办公楼和宿舍楼三维模型效果图。

图7 渲染后的建筑物三维模型效果图Fig.7 Effect chart of building 3D model after rendering
5 动态视频制作
为了使三维模型更加生动应进行动态视频的制作。
首先在SkechUp中保存多个场景页面,每个场景页面要充分考虑计算机的承受能力,不可过多。然后从菜单栏“模型信息”中设置场景延迟时间,在“导出动画”中设置帧画面尺寸、抗锯齿、帧率等参数,本案例帧画面尺寸设置为640*480,帧率为24,测试效果良好,画面较流畅。参数设置完成后,再以AVI视频格式输出,但为了使视频效果更加吸引人,还可利用Movie Maker软件对视频添加背景音乐和字幕,最后完成了整个动态视频的制作。在视频制作过程中,需注意以下两点:
1)在创建动画之前,最好先创建一个较小的预览动画以查看效果。把帧画面尺寸设为最小,同时降低帧率,这样画面虽然没有表现力,但能节约渲染时间,展示出动画的效果,显示出一些潜在的问题,如屏幕高宽比不佳,相机穿墙等。
2)从创造动画到后期合成,需要花费相当多的时间,而且越到后期,进行修改就越困难,因此,应尽量合理有效地利用SkechUp的实时渲染功能,事先将各参数、细节调整好,特别是在页面设置上,充分发挥SkechUp的阴影、剖面和建筑空间的漫游等方面的优势,以使表达效果更理想。
6 结论
本文分析了基于三维激光扫描仪和SkechUp进行三维模型构建的技术流程和方法,并实现了三维模型可视化。该方法通过TSE插件将点云数据与SkechUp建模软件有效结合起来并实时互动,充分发挥了SkechUp的优势,提高了建模效率,降低了建模难度,克服了三维激光扫描仪随机软件建模的局限性。因受时间和客观条件的限制,在以下几个方面还需要不断创新和完善:
1)本案例由于受到目标建筑物所在环境的影响,扫描时不可避免会存在遮挡和死角,导致在采集建筑物三维数据时,有些细节信息没有获取到,如地下室窗户、阁楼轮廓线及窗户,这使得最后建立的三维模型不够完整。
2)利用TSE插件提取轮廓特征信息在SkechUp中进行三维模型构建,该方法虽然快速方便,但由于人机交互提取的外轮廓线存在一定的缺陷,在精度要求非常高的情况下并不适用。
3)三维建模过程中,模型太多、数据量过大会引起整体三维显示速度过慢。
[1]王潇潇.地面三维激光扫描建模及其在建筑物测绘中的应用[D].长沙:中南大学,2010.
[2]马立广.地面三维激光扫描测量技术研究[D].武汉:武汉大学,2005.
[3]潘建刚.基于激光扫描数据的三维重建关键技术研究[D].北京:首都师范大学,2005.
Application of Building 3D Modeling Based on 3D Laser Scanner and SkechUp
WANG Rui1,CHEN Lian1,CHEN Chong-lin2
(1.Xinjiang Petroleum Engineering Design Co.,Ltd.,Kelamayi Xinjiang 834000,China; 2.Yunnan Institute of Surveying and Mapping of Geology and Mineral Resources,Kunming Yunnan 650218,China)
Combined with the application of Trimble TX8 3D laser scanner in 3D modeling of buildings,the paper describes the attention of the 3D laser scanner in the fieldwork data collection.And how to transfer the buildings contour feature information to SkechUp for modeling,texturing,rendering,dynamic video production is discussed.Finally,a fast reconstruction method for building 3D model based on 3D scanner and SkechUP is proposed.
3D laser scanning technology;SkechUp;3D modeling;TSE;feature extraction;dynamic video production.
2016-06-22
P 225.2; P 208
B
1007-9394(2016)03-0047-03
王瑞(1984~),男,安徽寿县人,学士,工程师,现主要从事油气田工程测量方面的工作。