天宝TX8三维激光扫描仪在地形图测量中的应用*
2016-10-27万雪华王继卫
万雪华,王继卫,王 锐
(1.江西省地矿局物化探大队,江西 南昌 330002; 2.江西省地矿测绘院,江西 南昌 330030)
天宝TX8三维激光扫描仪在地形图测量中的应用*
万雪华1,王继卫2,王锐2
(1.江西省地矿局物化探大队,江西 南昌330002; 2.江西省地矿测绘院,江西 南昌330030)
文章首先介绍了三维激光扫描仪的基本原理,接着阐述了其与GNSS RTK和全站仪相比所具有的优势及在地形图测绘中的作业流程,最后结合一个实例简述了三维激光扫描仪在地形测图中的作业过程,并对地形图的精度进行了检测与分析,验证了三维激光扫描技术可应用在地形测图中且具有一定的优势。
三维激光扫描技术原理;地形图测量;精度分析
0 引言
三维激光扫描技术是20世纪90年代中期出现的一项新技术,又被称为实景复制技术。它通过高速激光扫描测量的方法,大面积高分辨率地快速获取被测对象表面的三维坐标数据。目前较多用于文物数字化保护、土木工程、工业测量、自然灾害调查等,较少用于大比例尺地形测量,但实际上应用三维激光扫描技术进行大比例尺地形测量具有独特的优势,其具有快速性(测量速度最快达到120万点/s)、不接触性、穿透性、实时、动态、主动性、高密度、高精度(mm级)、数字化、自动化等特性[1-3]。
1 三维激光扫描技术的原理
对于大空间三维激光扫描仪来说,构造原理都是相似的。主要构造是由一台高速精确的激光测距仪,配上一组可以引导激光并以均匀角速度扫描的反射棱镜。地面三维激光扫描系统主要由3部分组成:扫描仪、控制器(计算机)和电源供应系统,如图1所示。激光扫描仪主要包括激光测距系统和激光扫描系统,同时也集成CCD、仪器内部控制和校正系统等。仪器通过两个同步反射镜快速而有序地旋转,将激光脉冲发射体发出的窄束激光脉冲依次扫过被测区域,测量每个激光脉冲从发出经被测物表面再返回仪器所经过的时间(或者相位差)来计算斜距S。同时内置精密时钟控制编码器,同步测量每个激光脉冲横向扫描角度观测值α和纵向扫描角度观测值β,被测云点P的三维坐标,如图2所示 。激光扫描系统的原始观测数据除了两个角度值和一个距离值,还有扫描点的反射强度I,用来给反射点匹配颜色。拼接不同站点的扫描数据时,需要用公共点进行转化,通常有基于目标(平面和球状)和无目标2种。

图1 三维激光扫描仪工作原理Fig.1 The working principle of 3D laser scanner
三维激光扫描测量的坐标系一般为仪器自定义坐标系。X轴在横向扫描面内,Y轴在横向扫描面内与X轴垂直,Z轴与横向扫描面垂直。如果测站的空间坐标是已知的,那么可以求得每一个扫描点P的三维坐标,见图2。其中,XP=Scosβcosα,YP=Scosβsinα,ZP=Ssinβ。
2 三维激光扫描仪与GNSS RTK和全站仪相比的优势
三维激光扫描仪与GNSS RTK和全站仪相比具有如下优势:
1)三维激光扫描采用非接触方式进行测量:无需对目标物体表面进行任何处理,适用于解决危险目标、环境及人员难以涉及的情况。
2)数据采集速度快及采样率高:TX8采用脉冲波技术(脉冲相位一体式技术,既能保证相位式的精度和速度,又能保证脉冲式的距离),在120万点/s全速扫描情况下,在整个测程120 m的距离上保持不大于2 mm的测距精度,可见采样速率是传统测量方式难以比拟的。而GNSS RTK 及全站仪测图,地形特征点必须全部立镜杆实测,作业效率低。
3)免绘草图:由于三维激光扫描测量属全方位测量,其外业数据较全,所以无须绘制草图,只需在内业进行综合取舍,完成制图任务。对于不满足要求的综合取舍可以根据原始点云数据进行修改,不必再去现场。而采用GNSS RTK 和全站仪测量只能得到施测区域离散点坐标,内业绘图人员不清楚测区的详细情况,需要依赖草图或与外业人员进行反复沟通。
4)可实现全天候作业:三维激光扫描仪具备较高的防水性,操作方便,在雨天或者夜间测量人员也可作业,而全站仪在雨天和夜间几乎难以作业。
5)一次扫描多比例成图:采用三维激光扫描测量同时能够得到所扫描区域1∶1比例尺完整空间信息和相关属性信息,可从扫描点云数据中提取出需要的信息;变更比例尺时,只需按规范提取相应的特征点即可。而GNSS RTK 和全站仪测量时,当需要同一测区更大比例尺地形图时,需要重新测图,成本增加。
6)可形成多种成果:采用三维激光扫描测量可以提供高精度的DEM、三维模型、浏览视频等增值产品,实现对数据的充分利用,而GNSS RTK和全站仪测量所得到的成果以二维地形图居多,无法提供更多的数据增值成果。
7)可解决外业大量质量检查工作:由于三维激光扫描测量完整记录了现场的信息,质量检查人员在室内就可以通过对所绘地形图与点云数据进行比较来判断是否出现错绘、漏绘现象,还可以直接在点云数据上进行量距等操作来对绘图精度进行检查,这样可以大大减少外业检查的工作量,节省时间,提高工作效率。而GNSS RTK和全站仪测图需要质量检查人员携带绘制好的地形图到测区实地核查,且需逐一核查地形要素,外业工作量较大,效率不高。
3 三维激光扫描地形图测量一体化流程
三维激光扫描地形测量作业一体化流程,如图3所示。

图3 三维激光扫描地形测量作业一体化流程Fig.3 Integration process of 3D laser scanning topography measurement
4 应用实例
以某单位大院地形图测绘为例,介绍三维激光扫描仪在地形图测绘中的应用。
4.1布设控制点
采用GNSS RTK 技术在该单位大院内均匀布设了4个控制点(图根级)。
4.2站点设置及扫描
设置扫描站点时需要详细的勘察测区现场环境,科学的布置扫描测站可以以最少的站点获取最详细的数据,架设好仪器(TX8有倾角计量功能,无须整平)后设置仪器参数,扫描时点云数据并不是越多越好,在满足项目成果需求的情况下,以最优的扫描参数获取点云数据会大大提高工作效率。
4.3扫描数据导入
在天宝RealWorks中支持直接把扫描数据拖入软件中,如图4、图5所示。
图4 扫描原始点云Fig.4 Scanning original point cloud
图5 导入原始点云Fig.5 Importing original point cloud
4.4扫描站点数据全自动无目标拼接
将三维激光扫描仪获取的原始点云数据导入天宝Real-Works中,由于扫描的每个测站都是其测站坐标系,需要进行统一,所以需进行无目标站点整体拼接。在大范围复杂现场扫描中往往需要几十站甚至上百站的扫描,所以高精度的站点拼接是精确提取线划图、建模等成果的保障。完成拼接测站示意图如图6所示,拼接精度如图7所示。

图6 完成拼接测站示意图Fig.6 The schematic diagram of station point cloud matching
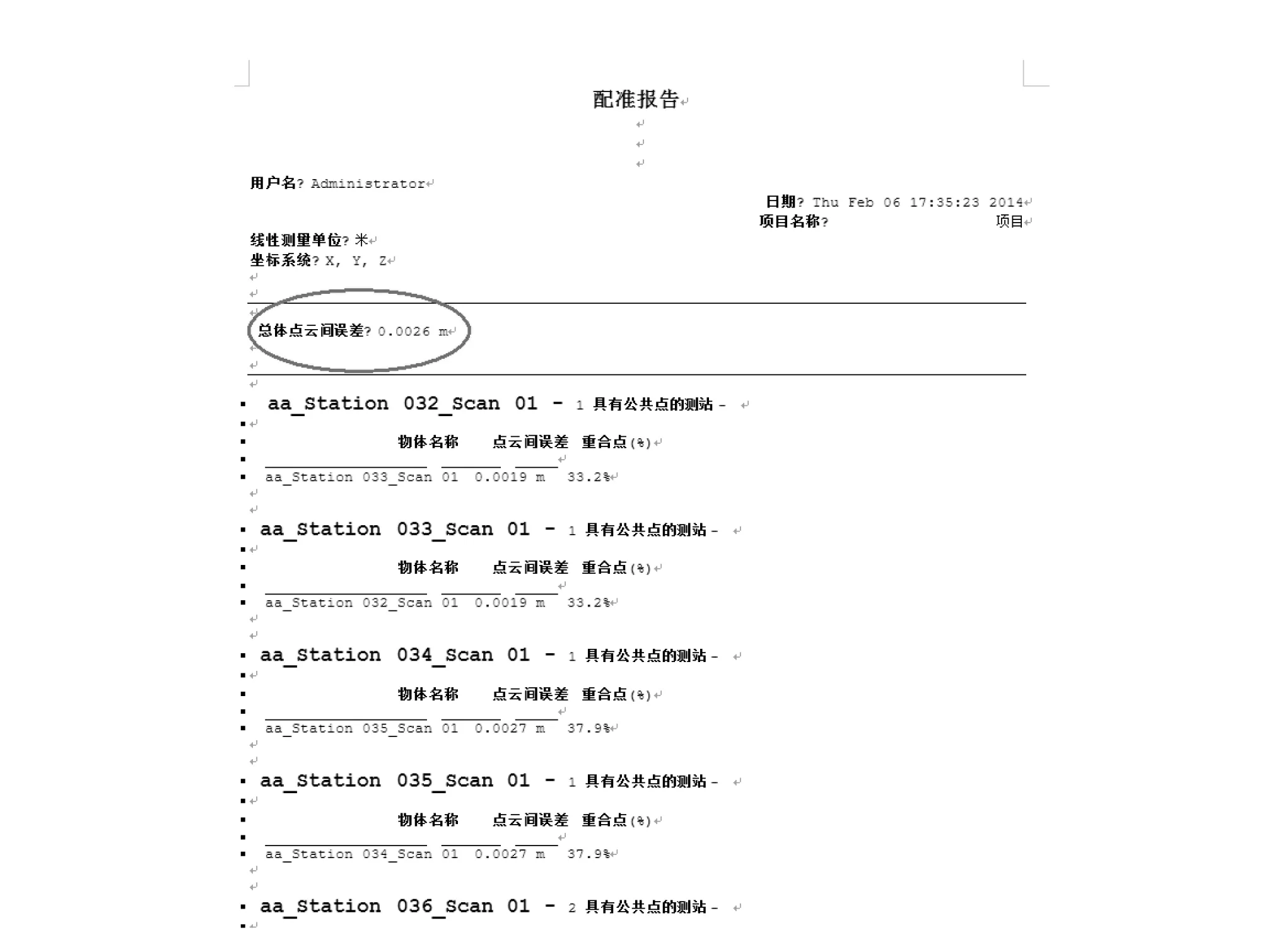
图7 拼接精度Fig.7 Matching accuracy
4.5点云空洞修补
对地形进行扫描测量时,生成的点云数据含有各种无法扫描到的区域,即存在大量空洞。这些空洞对点云的后续处理会造成较大影响,所以要对点云空洞进行修补,修补方法一般采用两种:
1)实地补测法,其基本原理是用三维激光扫描仪或全站仪对点云空洞的区域再进行扫描或测量,把获得的数据配准到点云数据中。
2)点云内插法,其基本原理是按照空洞周围点云数据,结合现场照片,在计算机上运用数据处理软件中的算法,对其空洞进行内插修补,选取软件算法时要结合实际地形和空洞区域地形,选择合适的算法进行内插处理。
4.6坐标系转换
扫描仪直接扫描的数据是基于扫描仪的扫描坐标系,在实际生产中往往用到的是国家坐标系或独立坐标系,这就需要把点云从扫描仪坐标系转换到实际需要的坐标系。在现场扫描前要在整个测区均匀布设若干图根点(满足不同坐标系转换要求即可),可以采用平面标靶或靶球(如图8所示)。扫描过程中要扫到标靶或靶球,这些标靶或靶球同时具有扫描仪坐标系和实际坐标系两套坐标,用于坐标系转换。

图8 转换坐标系所用标靶点Fig.8 The target for convering survey coordinate system
在天宝RealWorks软件中,利用“大地基准工具”,实现坐标系的转换。
4.7数据抽稀
不同的项目对于点云密度要求不一样,可以将点云按一定规律抽稀,以便减少数据容量,提高工作效率。点云抽稀工具,如图9所示。

图9 点云抽稀工具Fig.9 Filtering tool of point cloud
4.8利用特征点绘制地形图
完成点云的导入、拼接、转换之后,就可以进行基于点云的特征点提取,把提取后的特征点导入第三方软件中进行地形图绘制。如要绘制房屋、道路、独树、路灯等地形图要素时,利用RealWorks中的“特征点工具”模块(如图10所示),在点云中选取所要绘制对象的特征点创建即可,操作简便。
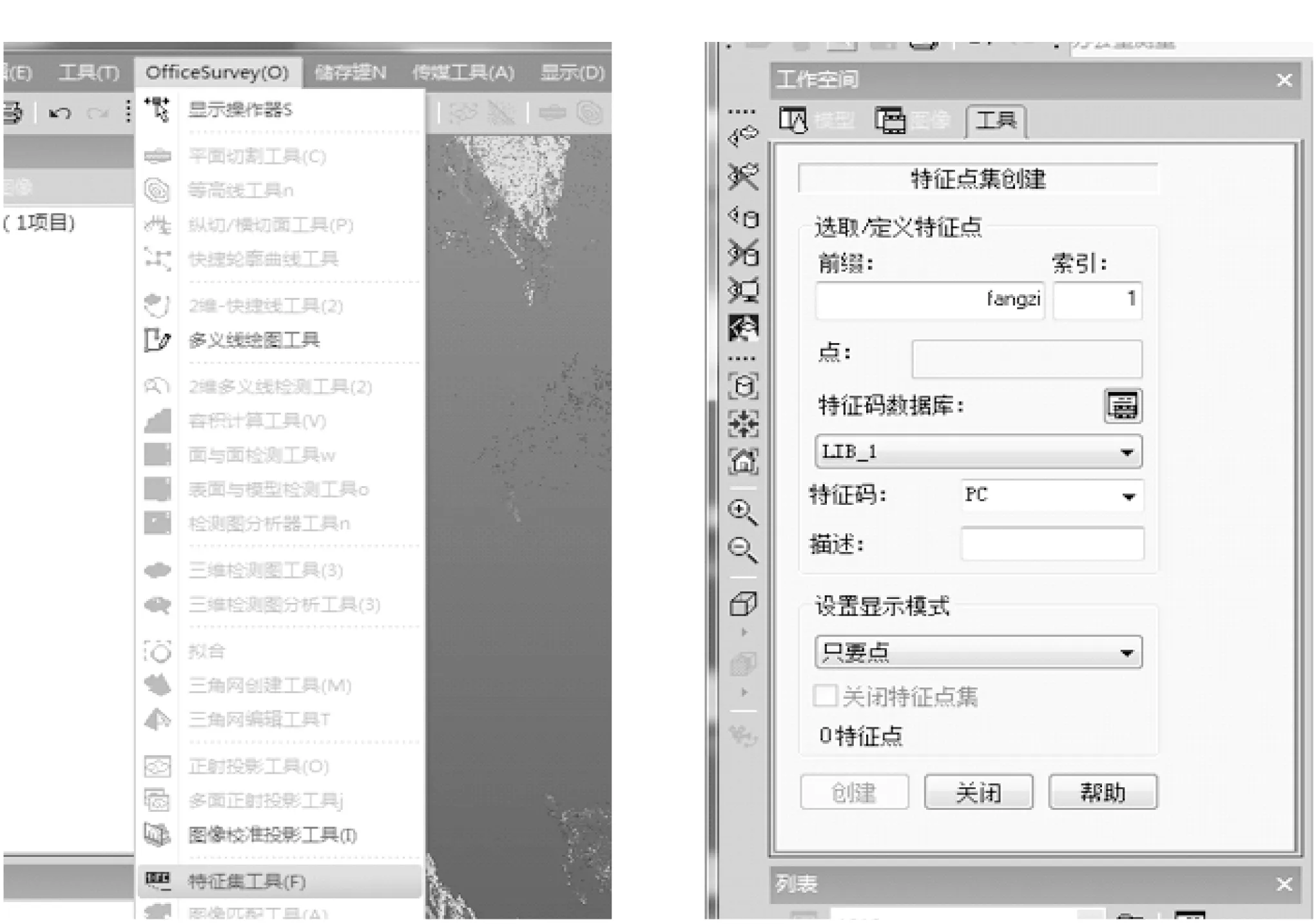
图10 特征点工具Fig.10 Extracting tool of feature points
特征点创建完后,就可以利用RealWorks中的“输出特征点集”命令,把创建好的特征点输出为第三方绘图软件(本文使用的软件为CASS成图软件)需要的数据格式文件。把编辑好的特征点数据文件导入第三方绘图软件中,就可以进行自动或人工绘图作业,图11为绘制的某单位大院地形图的一部分。
4.9外业调绘、修补测
外业调绘、修补测,采用钢卷尺、全站仪进行作业,对于大面积缺漏的区域,采用激光扫描仪补测。根据照片进行外业调绘,外业补测数据在AutoCAD中进行制图。
4.10地形图精度检测与分析
为分析三维激光扫描仪施测地形图的精度,本文用全站仪采集了部分房角的坐标,同时用钢卷尺量取了部分房屋边长进行对比,其误差见表1和表2。

图11 某单位大院部分地形图Fig.11 A part of topographic map for a courtyard

序号地物间名称实量边长D/m图上边长d/m(D-d)/cm1房宽14.0014.08-8.02房宽10.9210.911.03房宽10.8810.862.04房角-房角24.9624.933.05房宽9.309.34-4.06房角-房角4.194.172.07房宽6.236.24-1.08房角-房角5.525.53-1.0

表2 地物点平面位置误差检测表(部分)
表2(续)
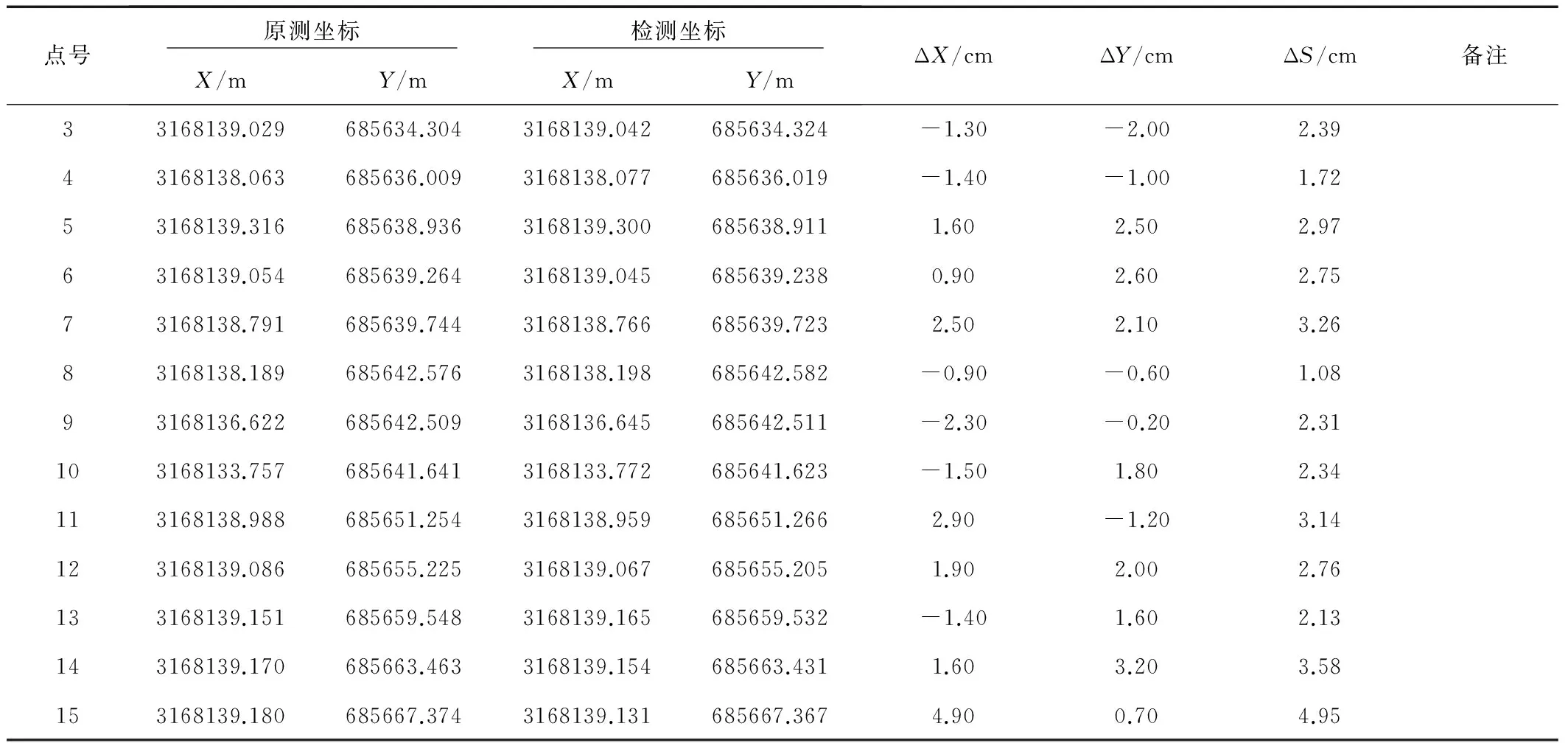
点号 原测坐标 检测坐标 X/mY/mX/mY/mΔX/cmΔY/cmΔS/cm备注33168139.029685634.3043168139.042685634.324-1.30-2.002.39 43168138.063685636.0093168138.077685636.019-1.40-1.001.72 53168139.316685638.9363168139.300685638.9111.602.502.97 63168139.054685639.2643168139.045685639.2380.902.602.75 73168138.791685639.7443168138.766685639.7232.502.103.26 83168138.189685642.5763168138.198685642.582-0.90-0.601.08 93168136.622685642.5093168136.645685642.511-2.30-0.202.31 103168133.757685641.6413168133.772685641.623-1.501.802.34 113168138.988685651.2543168138.959685651.2662.90-1.203.14 123168139.086685655.2253168139.067685655.2051.902.002.76 133168139.151685659.5483168139.165685659.532-1.401.602.13 143168139.170685663.4633168139.154685663.4311.603.203.58 153168139.180685667.3743168139.131685667.3674.900.704.95
注:表2中,ΔS为点位误差。
从表1、表2可以看出:利用三维激光扫描仪测量的地形图的精度完全可以达到规范要求。
5 结束语
通过实例分析可以得出,三维激光扫描技术具有如下特点:
1)在无遮挡情况下可以长距离、大范围、无接触得到地貌地物特征点坐标;同时,能够得到所扫描区域1∶1比例尺完整空间信息和相关属性信息,内业人员可从扫描点云数据中提取出所需要的信息;变更比例尺时,只需按规范提取相应的特征点即可;一次扫描可获得多种成果,可以提供高精度的DEM、三维模型、浏览视频等增值产品,实现对数据的充分利用。
2)扫描速度快,节约时间,测量完整、精确,可多视角观察可视化三维点云模型。无须接触被测物体,可在光线昏暗条件下甚至夜间作业,尤其是对表面复杂物体的外形测量更具优势。
3)从效益上看,外业测量速度较快,然而内业数据处理及成图可能要花费使用全站仪测量得到的数据处理时间的3倍,但把大量的外业工作转移到了内业,改善了测量的工作环境。
4)隐蔽区域外业补测工作量较大。
5)植被覆盖大的区域,如茅草、灌木、树林覆盖密集时扫不到地面,虽然TX8随机软件有植被剥离技术,但仍有看不到地面的情况,高程精度难以保证。
6)采集独立地物(如消防栓、检修井、路灯、电线杆等)时,在点云数据中查找不方便,需要在每站的Tse文件中查找,速度慢,影响内业效率。
7)软件不够完善,如何确保多站点云数据拼接精度及地物目标特征点线提取精度,是目前软件需要解决的问题。
随着GNSS硬件技术和地面三维激光扫描技术的不断提高,其软件性能不断改善,将对推动和发展数字化与智能化在地形测量中的应用发挥积极作用。
[1]马立广.地面三维激光扫描测量技术研究[D].武汉:武汉大学,2005.
[2]范海英,杨伦,刑志辉,等.Cyra三维激光扫描系统的工程应用研究[J].矿山测量,2004(3):16-18.
[3]谢武强,宋杨,王峰,等.三维激光扫描仪在建筑物立面测量中的应用[J].城市勘测, 2013(1):12-14.
Application of 3D Laser Scanner Trimble TX8 in Topographic Map Measurement
WAN Xue-hua1,WANG Ji-wei2,WANG Rui2
(1.Geophysical & Geochemical Exploration Brigade of Jiangxi Bureau of Geology and Mineral Resources,Nanchang Jiangxi 330002,China; 2.Jiangxi Institute of Surveying and Mapping Geology and Mineral Resources,Nanchang Jiangxi 330030,China)
The article introduces the basic principle of 3D laser scanner.Then it expounds its advantages compared with GNSS RTK and total station and the working process of topographic map surveying and mapping.Finally,combined with an instance,the paper describes its working process,and tests and analyses the precision of topographic map,and validates the feasibility of the 3D laser scanning technology in topographic map measurement and has its advantages.
principle of 3D laser scanning technology;topographic map measurement;precision analysis
2016-05-05
P 225.2; P 217
A
1007-9394(2016)03-0010-05
万雪华(1970~),女,江西南昌人,学士,工程师,现主要从事测绘管理方面的工作。