基于Qt的多移动机器人协调仿真系统研究
2016-10-26尚文颜钦
尚文,颜钦
(苏州科技学院机械工程学院,江苏苏州215011)
基于Qt的多移动机器人协调仿真系统研究
尚文,颜钦
(苏州科技学院机械工程学院,江苏苏州215011)
多机器人系统一直是机器人领域研究的热点,针对多机器人的协调问题开发了一个基于Qt的仿真系统。该系统既能仿真机器人的各种典型运动行为,比如定点运动、漫游等,同时嵌入了多机器人的协调算法,从而可以更直观地验证和显示多机器人系统的协调运动行为。
Qt;多机器人系统;协调;仿真
多机器人系统,与单个机器人相比具有许多明显的优点,例如,能通过彼此的合作完成某些单个机器人不能完成的任务;由于其内在的并行性,在完成任务时可能具有更高的效率;由于在功能上有互补,因而可以提高系统的鲁棒性和容错能力。正因为多机器人系统具有诸多优点,使得其在军事、工农业生产、空间探索、医学、交通控制、服务行业等领域具有良好的应用前景并已经得到了一定的实际应用。多机器人系统协调是多机器人系统研究中的主要内容,其中寻求有效的协调机制是研究的重点,而要验证协调机制的有效性则需要将协调控制算法作用于实际的机器人上,但对于有几十甚至上百个机器人组成的多机器人系统而言,费用将是不得不考虑的一大问题,因此,许多研究机构通过搭建仿真系统来进行验证。目前国内关于机器人系统的仿真有借助Microsoft Robotics Studio的运动仿真[1-3],基于OpenGL的机器人漫游系统仿真[4],以及自重构机器人的仿真[5],文献[3,6]讨论了双工业机器人协调焊接的仿真,文献[7]讨论了多机器人任务级的协调仿真。笔者设计实现了一个简单有效的用于多机器人系统协调的仿真平台,与文献[7]中的方法类似,但借助Qt这一强大的跨平台图形开发工具[8],实现了将多机器人协调控制机制进行直观形象的验证仿真。
文中内容安排如下,首先介绍仿真系统中关于机器人的各个功能模块,包括运动模块、声纳传感模块和环境建模形式,然后介绍以前提出的一种多机器人协调算法,在验证仿真部分,介绍典型的机器人运动形式的仿真以及多机器人系统的协调运动仿真。
1 机器人相关模型
1.1运动模型
在仿真环境中,机器人采用多边形表示机器人的本体,右边三角形的顶点所示方向表示机器人的前进方向,中间方框里的圆点表示机器人的中心点位置,如图1所示。
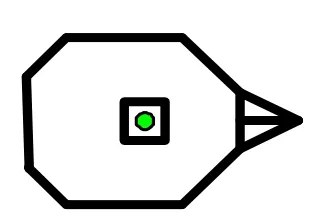
图1 机器人本体模型
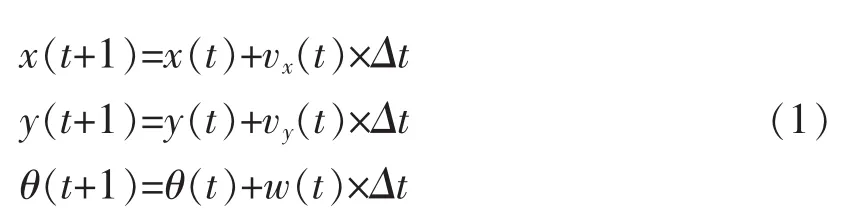
机器人的运动模型以具有两个差分驱动的驱动轮和一个负责平衡的万向轮组成的运动机构来建模,以机器人本体的中心点为中心将其虚拟化为一个具有方向的运动质点。在二维环境中机器人的运动参数有在时刻t时X和Y轴方向的位置坐标x(t)和y(t),X和Y轴方向的运动速度vx(t)和vy(t),角度θ(t)和旋转角速度w(t),如图2所示。在运动过程中运动参数的更新方程为
1.2环境模型
机器人工作的环境利用直线段来描述环境空间的分布布局,图3为设计的环境模型格式,第一行为模型中的直线段的数目,以下每一行表示一条直线段,用直线段的起始点坐标和终点坐标表示。环境模型以文件形式存于本地,在仿真平台上可以加载进行显示。
1.3声纳传感模型
声纳传感器和蝙蝠辨别障碍物的原理类似,能够利用超声波的回声来测得周围障碍物的距离信息。在建模时,机器人前方装配有10个声纳传感器,其中左右两边各有2个,前方以20°的角度间隔有6个传感器,实现全方位探测前方的障碍距离信息。每个声纳探测到的距离信息以灰色的直线段来表示,图4(a)所示为周围没有障碍物的声纳距离信息,此时灰色线段表示了声纳所能检测的最大距离,当机器人距离障碍物较近时,灰色直线段的长度显示了实际的距离信息,如图4(b)所示。
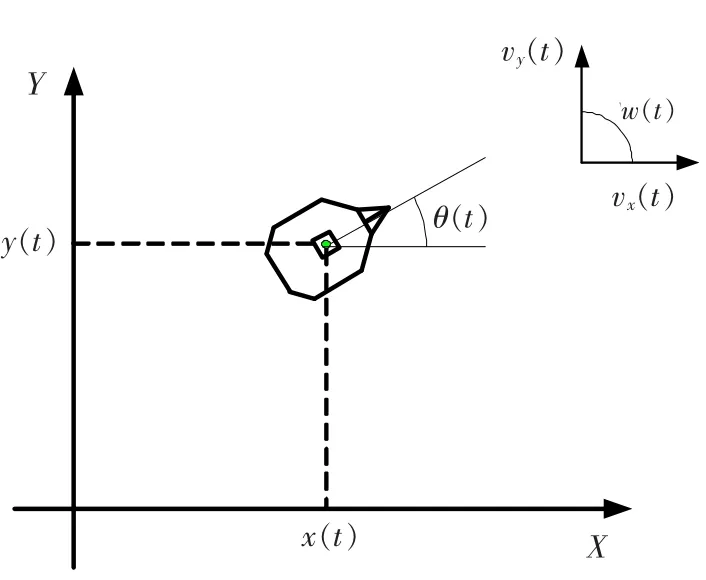
图2 机器人运动参数示意图
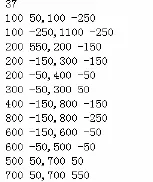
图3 环境模型示例
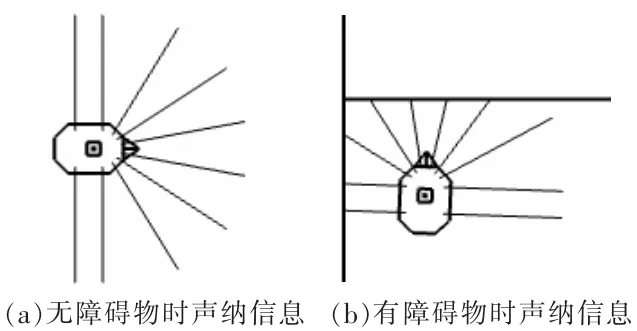
图4 声纳感知模型
2 多机器人协调控制模块
文献[9]提出了一种资源约束的多机器人协调调度方法,对于装配有不同资源(比如视觉系统、抓手或者激光等传感器)的多机器人系统,通过集中的最优任务分配优化方法,规划出每个机器人要完成的任务,实现多机器人系统的协调运行。该多机器人系统采用集划分的建模方法,利用不同资源的多机器人系统之间的资源同步来计算最优的任务分配方案。计算过程包括两个阶段:第一阶段计算具有同步约束的任务分配方案;第二阶段计算具体的时间调度。具体建模如下:
第一阶段建模
最大化
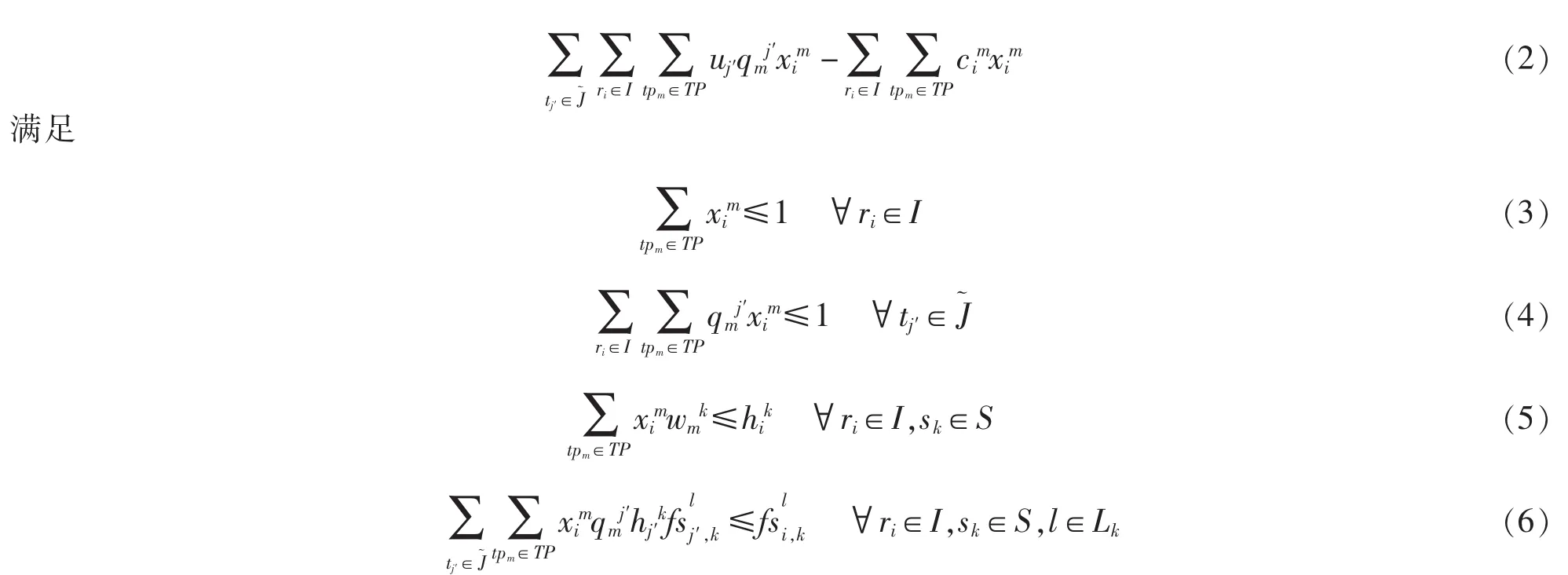
其中,目标函数表示最大化完成任务的报酬减去付出的总的代价,在目标函数中,第一项表示完成任务的报酬,第二项表示每个机器人完成任务付出的代价之和,约束(3)表明每个机器人只能分配最多一个任务,约束(4)表示每个任务最多只能被一个机器人来完成,约束(5)表示完成任务计划所需要的资源必须小于或等于每个机器人所拥有的资源,约束(6)表示完成任务计划所需要的资源的功能值必须小于或等于每个机器人所拥有的资源功能值。
第二阶段计算当存在资源同步的时候,如何调度每个机器人的执行时间。某个任务的执行需要不同的资源,而这些资源被不同的机器人所拥有,因此,其中一个机器人在到达任务执行地点后,需要等待拥有其他资源的机器人都到达任务执行地点才可一起执行该任务。具体建模为:
最小化
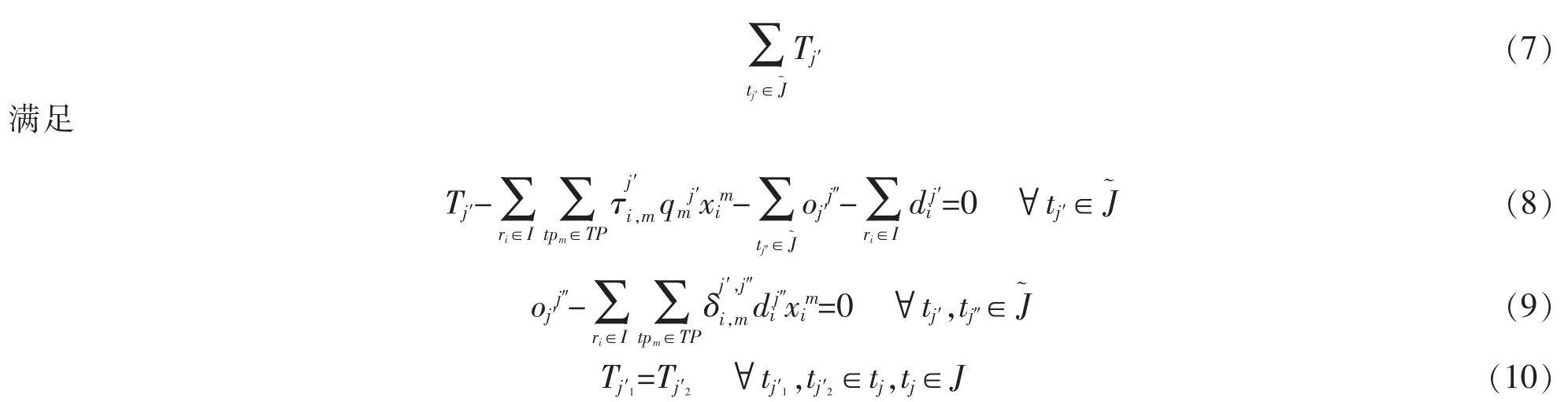
其中目标函数最小化所有任务的执行时间,约束(8)表示任务的执行时间、机器人本应到达时间和延迟时间之间的关系,约束(9)表示机器人达到延迟时间和执行任务延迟时间之间的关系,约束(10)表示任务和任务要求时间上同步,具体如图5所示。
以上协调调度问题利用CPLEX的Branch-and-bound方法和LP方法可以求解,在仿真系统中,将该模块作为仿真系统的协调控制模块,当输入模型的参数,计算出相关的任务调度方案之后,多机器人系统就开始自动执行所分配的任务。
3 运动仿真
开发的仿真系统如图6所示,主要功能有加载环境模型、典型运动,包括直线前进和后退,逆时和顺时旋转、定点运动、漫游和多机器人协调运动。
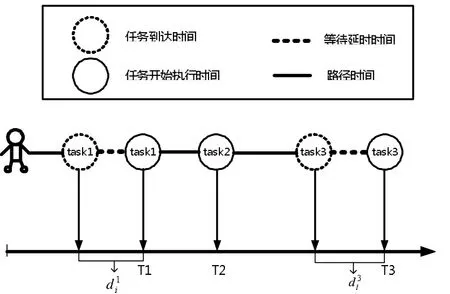
图5 任务调度关系
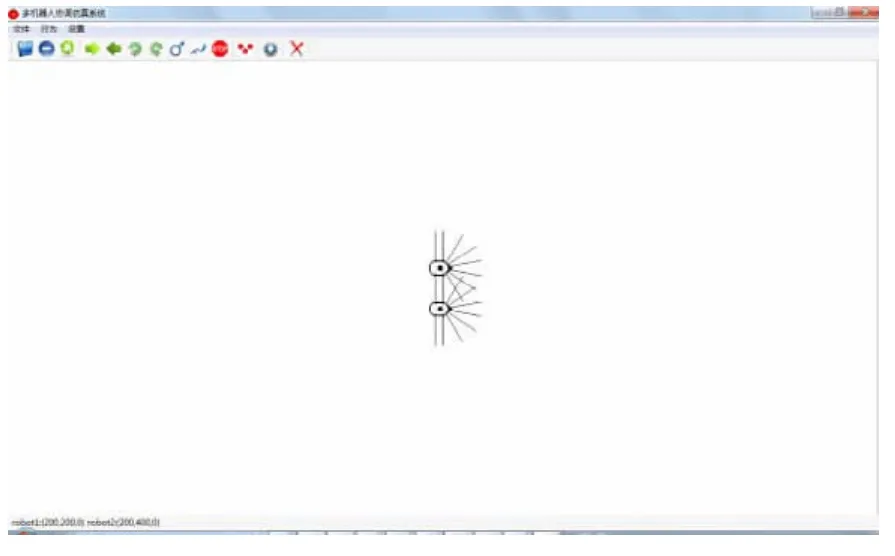
图6 仿真系统操作界面
3.1加载环境模型
在文件菜单中点击加载地图,选择要加载的地图模型文件,在视图中即显示出环境模型地图。图7(a)为加载的办公室环境模型,图7(b)为加载的迷宫环境模型。环境模型视图可以进行平移、放大和缩小以观察局部细节或扩大视野范围。
3.2典型运动实例
以在办公室环境中的两个机器人作为实例,验证机器人的典型运动,包括直线运动、旋转运动、定点运动和漫游。图8为两个机器人在连续采样时刻的直线运动序列,机器人身后直线段是机器人的运动轨迹。图9为两个机器人在连续采样时刻的逆时针旋转运动序列。图10为机器人的定点运动序列。图11是机器人在环境中漫游的运动序列。

图7 加载环境模型
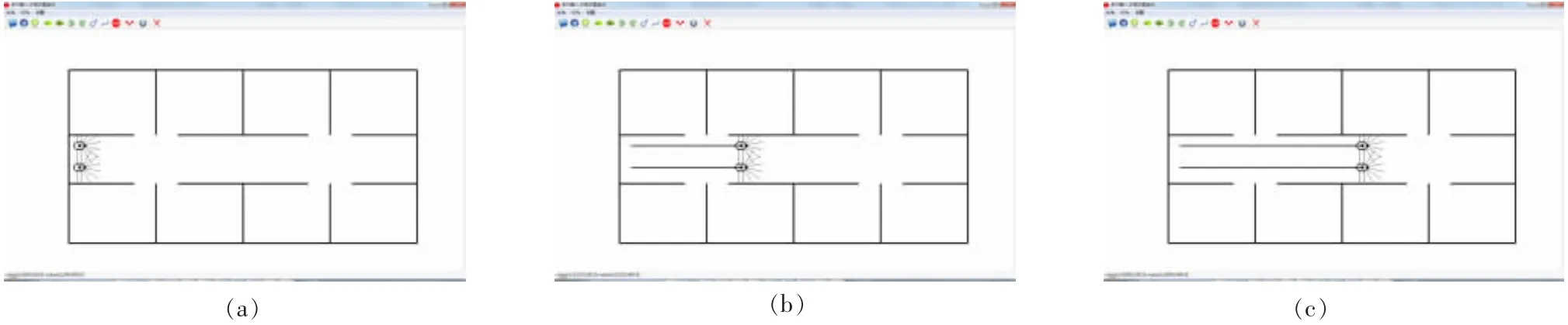
图8 直线运动实例
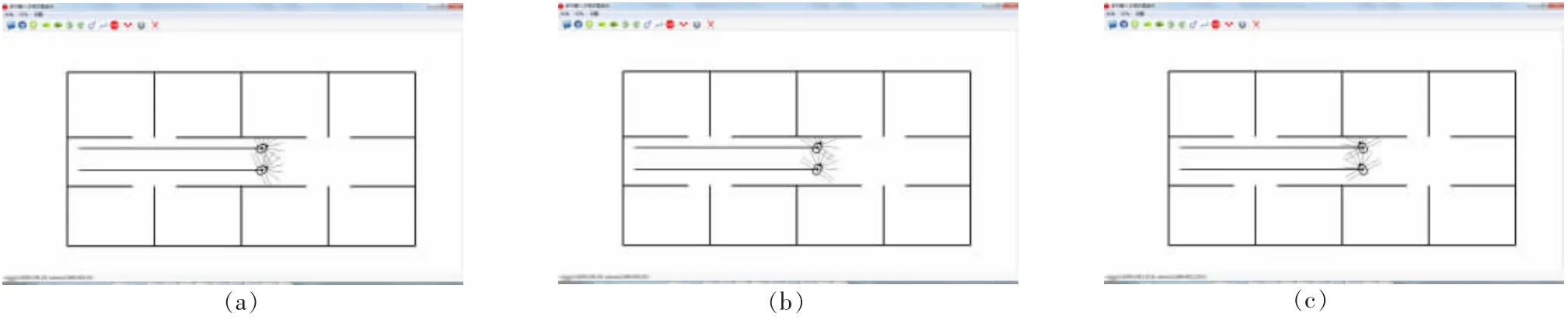
图9 旋转运动实例

图10 定点运动实例
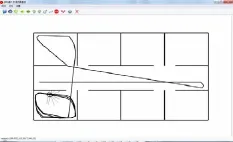
图11 漫游实例
3.3多机器人协调运动实例
以文献[9]中的实例为例进行验证,首先设置协调模型参数,包括机器人和任务的数目和位置,第一和第二阶段的模型参数,在协调控制模块计算出结果后开始执行协调运动,如图12所示。图13是协调运动的运动序列。当机器人行进过程中存在障碍物时,机器人会绕过障碍物,再运动到执行任务的位置处。如图14所示,机器人2运动过程中遇到障碍物,机器人2开始避障,当确定远离障碍物后,继续运动到任务3处,再进行后续的任务。
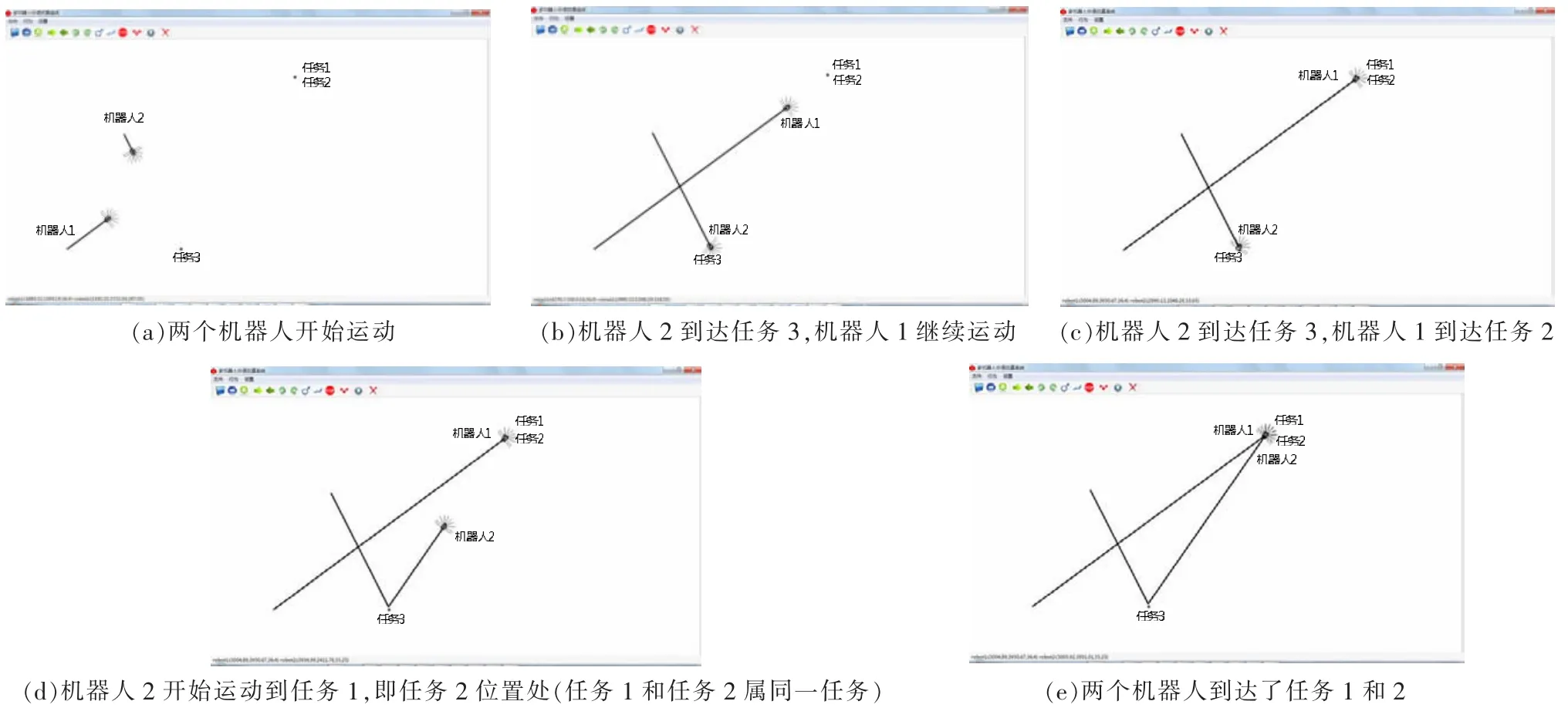
图13 协调运动序列

图14 有障碍物时的协调运动实例
4 结语
笔者设计开发了基于Qt的多机器人协调系统的仿真平台,该平台能够验证各种机器人控制算法,并集成了多机器人协调控制,从而能够更方便直观地测试各种多机器人系统的控制。
[1]黄立,叶益斌,张辉.基于Microsoft Robotics Studio的机器人运动仿真研究[J].机电工程,2010,27(8):122-126.
[2]麦晓春,张新征,杨厚强,等.基于微软机器人控制仿真平台的路径规划仿真[J].计算机应用,2013,33(S1):55-58,101.
[3]谭定,李亮玉,王天琪.基于RobotStudio的双机器人协调仿真[J].焊接技术,2011,40(6):45-48.
[4]樊雅萍,黄生学,温佩芝,等.基于OpenGL的机器人虚拟漫游系统开发[J].系统仿真学报,2005,17(10):2426-2428,2441.
[5]田华英,吴秋轩,曹广益.基于Java 3D的自重构机器人仿真平台的构建[J].计算机仿真,2006,23(11):271-274.
[6]张铁,欧阳帆.双机器人协调焊接任务规划及仿真[J].焊接学报,2012,33(12):9-12.
[7]张浩水,曹志强,周超,等.集成任务级与运动级协调的多机器人仿真系统[J].系统仿真学报,2009,21(6):1579-1582.
[8]BLANCHETTE J,SUMMERFIELD M.C++GUI Qt4编程[M].2版.北京:电子工业出版社,2008.
[9]WEN Shang,JUN Zhong,QIN Yan.Resource constrained multirobot task allocation with an optimal solution[C]//Chengdu:IEEE.Interntational Conference on Mechatronics and Automation,2012:2389-2394.
Research on Qt-based multi-robot coordination simulation system
SHANG Wen,YAN Qin
(School of Mechanical Engineering,SUST,Suzhou 215011,China)
Multi-robot system is a hot topic in the robotic field.We have developed a new Qt-based simulation system for multi-robot coordination which can simulate all kinds of typical robotic motions,such as fixed-point motion,wandering,etc.Multi-robot coordination mechanism and algorithm have been embedded in the simulation system.Thus the coordination can be intuitively verified and displayed.
Qt;multi-robot system;coordination;simulation
TP24
A
1672-0687(2016)01-0065-05
责任编辑:艾淑艳
2015-11-09
国家青年科学基金资助项目(51305287);江苏省自然科学基金资助项目(BK20130624;13KJB510034);校科研基金资助项目(XKZ201312)
尚文(1978-),女,山东菏泽人,讲师,博士,研究方向:多机器人系统,自动化。
