基于改进模型参考自适应算法的永磁同步电机转动惯量辨识
2016-10-26王飞宇田井呈卓克琼赵朝会
王飞宇, 田井呈, 卓克琼, 赵朝会
(上海电机学院 电气学院,上海 201306)
基于改进模型参考自适应算法的永磁同步电机转动惯量辨识
王飞宇,田井呈,卓克琼,赵朝会
(上海电机学院 电气学院,上海201306)
针对使用固定增益系数的模型参考自适应(MRAS)算法在稳定性与收敛响应速度不可同时兼得的问题,介绍了基于MRAS算法的永磁同步电机转动惯量辨识的原理,研究了该算法中自适应增益系数对电机转动惯量辨识结果的影响。探讨了一种依据辨识参数偏差而实时改变的变增益系数的方法,并通过MATLAB/Simulink对参数辨识系统进行了仿真验证。仿真结果表明,该方法收敛速度快,参数辨识结果振荡幅值小,稳定性好。
永磁同步电机; 模型参考自适应; 转动惯量辨识
0 引 言
交流永磁同步电机伺服控制系统被广泛应用于高精度、高性能的场合。然而,伺服系统的动态性能会受电机内部参数、外部扰动转矩和一些非线性因素的影响[1]。由于转动惯量对伺服系统的控制性能影响较大,是控制系统主要的性能指标[2],因此辨识出整个伺服系统的转动惯量变得非常重要。
国内外研究人员对转动惯量辨识的方法做了大量的研究。现有的转动惯量辨识方案可归纳为两类: 离线转动惯量辨识方案和在线转动惯量辨识方案。离线转动惯量辨识方案是在系统控制程序运行前通过直接测试法、加减速法和人工轨迹法等[3- 6]对惯量进行辨识,将测得的参数提供给控制程序使用。离线式辨识方法需要对大量的数据进行存储和运算,不具有实时性且辨识精度差,这些缺点限制了其应用于高性能的控制系统的范围[7]。随着大量的现代控制理论应用于电机控制领域,逐渐形成一套在线式辨识理论,可对运行中的系统的转动惯量等参数进行实时辨识,并将所辨识的参数实时提供给系统的控制程序使用,实时性较强,控制精度高。常用的在线式转动惯量辨识方法有: 最小二乘法、卡尔曼滤波器、观测器法和模型参考自适应法(Model Reference Adaptive System, MRAS)等。文献[8]使用递推最小二乘法对直流电机的转动惯量进行辨识,但算法需要加高阶滤波器,适用于控制简单的系统。文献[9]对具有遗忘因子的最小二乘法进行了改进,克服了辨识器的波动问题。文献[10]提出了一种基于扩展卡尔曼滤波的辨识方法,可对系统的转动惯量和负载转矩等实时辨识,但需要进行复杂的计算和非线性滤波的处理。使用状态观测器法[11]对转动惯量进行辨识需要通过对模型的非线性、多变量和多状态量等进行处理,存在多种误差[12]。MRAS法因具有算法简单、便于使用在数字控制系统等优点,研究人员对其做了大量研究。文献[13]结合MRAS理论和闭环磁链观测器构造出异步电机的速度自适应观测器,成功地对电机的转速进行了辨识。文献[14]将最小二乘法加入了MRAS辨识系统,提出了一种改进的MRAS参数辨识方法,改善了辨识速度和振荡幅度。文献[15]将变结构控制与模型自适应系统结合,提出了一种变结构MRAS方法,对参数辨识的动静态性能较好。文献[16]对MRAS做了改进,通过设计两个自适应增益系数大小不同的系统,在一定程度上改善了辨识模型对增益参数的依赖。
本文通过分析MRAS系统中自适应增益系数对永磁同步电机转动惯量辨识的收敛速度与参数稳定性的影响,给出了一种依据辨识误差提供增益系数的控制方案,通过仿真得出该方案具有抑制辨识结果波动和收敛速度快等优势。
1 电机数学模型和MRAS辨识方法
1.1电机数学模型
永磁同步电机的数学模型建立在不计涡流损耗、磁滞损耗和忽略铁心饱和等条件下,在id=0的矢量控制系统下对永磁同步电机转动惯量辨识,其中运功方程(1)与转矩方程(2)是对转动惯量辨识的基本方程。
(1)
(2)
式中:J——转动惯量;
ωr——转子角速度;
Te——电磁转矩;
TL——负载转矩;
p——电机极对数;
ψf——永磁铁的励磁磁链;
iq——两相旋转q轴电流分量。
1.2MRAS转动惯量辨识
MRAS方法由参考模型和可调模型组成,且两个模型具有相同物理意义的输入量和输出量,依据两个模型输出量的误差构成合适的自适应辨识算法。当通过算法调节两个模型的输出量无限逼近时,便可辨识出实际物理模型中的待辨识参数。永磁同步电机转动惯量辨识方法中参考模型与可调模型的确立过程如下。
将式(1)离散和简化可得
ωm(k)=2ωm(k-1)-ωm(k-2)+
(3)
式中:T——系统的采样周期。
在高性能的永磁同步电机控制系统中,在一个采样周期内负载转矩的变化可近似保持不变,则有
ωm(k)=2ωm(k-1)-ωm(k-2)+
bΔTe(k-1)
(4)
其中:b=T/J;
ΔTe(k-1)——一个采样周期的电磁转矩的差值。
将式(4)作为参考模型,则可得出可调模型的方程:
ωg(k)=2ωm(k-1)-ωm(k-2)+
bg(k-1)ΔTe(k-1)
(5)
式中:ωg——估计的速度信号;
ωm——速度信号。
由文献[17]可得出永磁同步电机转动惯量MRAS规律:
(6)
式中:β——自适应增益系数;
Δω(k)——速度信号与估计速度信号的差值。
依据MRAS算法的原理以及以上推导过程,可得到转动惯量辨识的原理图,如图1所示。

图1 转动惯量辨识原理图
2 变增益系数方法的推导
在MRAS算法中,自适应增益系数β的取值大小对转动惯量辨识的结果影响较大。一般在辨识系统中,自适应增益系数一旦选定,在辨识的过程中就不会变化,这就给参数辨识带来了问题: 自适应增益系数越大,参数辨识的收敛速度越快,但辨识结果的波动性越大;自适应系数越小,参数辨识波动性越小,但参数辨识结果的收敛速度越慢。实际过程中综合考虑收敛速度与波动性,选取一个合适的折中值,但这样会牺牲掉大增益系数时的收敛速度快和小增益系数时波动性小的优势。
为了充分利用自适应增益系数在最大值和最小值时的优势,设计了一个依据辨识参数偏差的变化而变化的可变增益系数的方法,使在输入偏差较大的阶段选择较大的自适应增益系数,在输入偏差较小的阶段选择较小的自适应增益系数,获得收敛速度快和辨识结果波动小的参数辨识结果。变增益系数β值的推导公式为
β=βmin+[e(J)]2βmax
(7)
式中:βmin——稳定性最好的自适应增益系数;
e(J)——转动惯量实际值与辨识值偏差的标幺化取值,范围[0,1];
βmax——最大收敛自适应增益系数。
可变增益系数β值的推导流程图与变增益系数参数辨识系统原理图如图2所示。
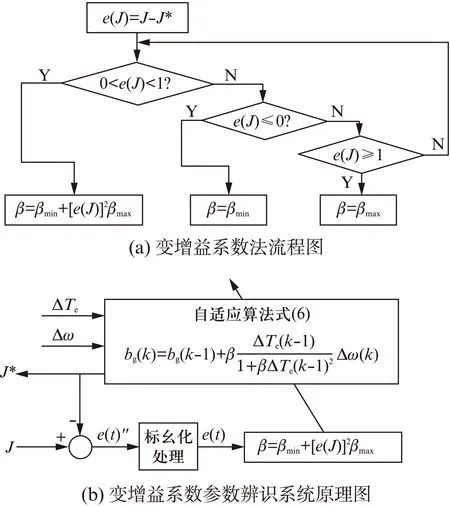
图2 变增益系数法流程图和变增益系数参数辨识系统原理图
3 仿真分析验证
通过MATLAB/Simulink搭建仿真模型,采用id=0的矢量控制。待辨识的电机参数如下: 极对数p=4;永磁体磁链0.175Wb;电机相绕组电阻2.875Ω;直轴、交轴电感均为0.85mH;转动惯量J=0.00085kg·m2。转动惯量辨识系统仿真图如图3所示。
依据参考模型式(4)、可调模型式(5)和自适应率算法式(6),在MATLAB/Simulink中搭建转动惯量辨识子模块如图4所示。
3.1自适应增益系数对转动惯量辨识的影响
在式(6)中,自适应增益系数β的取值会影响转动惯量辨识的结果。取自适应增益系数为β=30,β=20,β=10,β=5对永磁同步电机的转动惯量辨识,仿真结果如图5所示。
由图5可知,自适应增益系数β=30时,收敛时间为0.05s,收敛速度最快;当β=20时,收敛时间为0.07s,收敛速度较快;当β=10时,收敛时间为0.14s,收敛速度稍慢;当β=5时,收敛时间为0.25s,收敛速度最慢。所以,自适应增益系数越大,转动惯量的辨识波形收敛速度越快。另外,随着自适应增益系数逐渐增大,收敛速度变化的趋势降低,当达到一定收敛速度以后,增大自适应系数对收敛速度的改变作用变小。
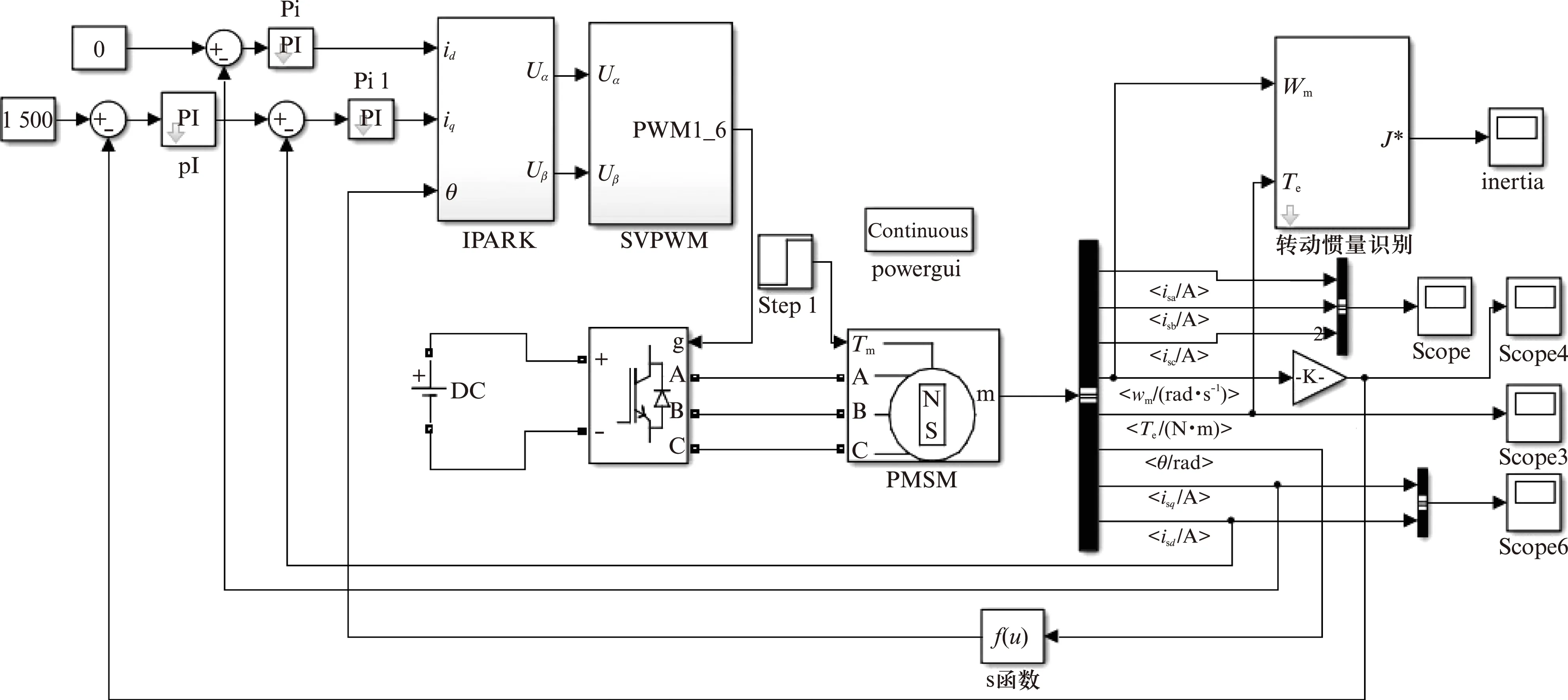
图3 永磁同步电机转动惯量辨识系统仿真框图
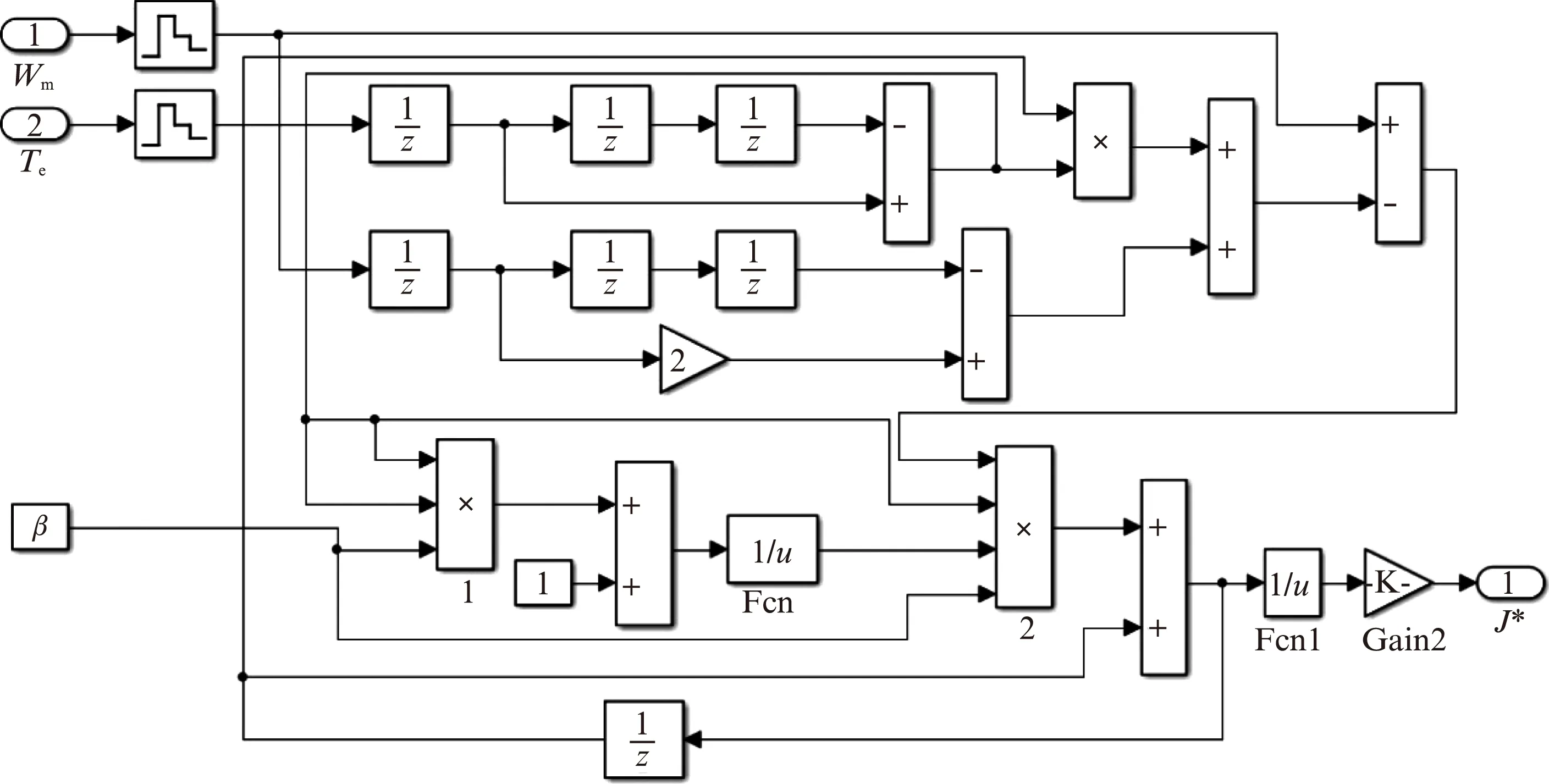
图4 MRAS转动惯量辨识算法仿真图

图5 不同增益系数时转动惯量辨识波形图
在t[0.3-0.38],J[0.0007-0.00095]区间取值,可得到在不同增益系数下的局部放大图,如图6所示。
由图6(a)可知,β=30时波形振荡幅度最大;由图6(d)可知,β=5时波形振荡幅值最小。综合分析得出: 自适应增益系数越大,转动惯量辨识的结果振荡幅度越大,波动性越强;自适应增益系数越小,辨识结果振荡幅度越小,辨识精度越高。
3.2变自适应增益系数转动惯量辨识的仿真
在MATLAB中按图2流程图对自适应增益系数β进行仿真,采取s函数编写变增益系数,取βmax=30、βmin=5,初始转动惯量取值为J=0.00085kg·m2。仿真采用变增益系数法和固定增益值为(β=5、β=30)作对比分析,转动惯量辨识的仿真波形如图7所示。
为了对比分析采用变增益系数法和β=5、β=30对参数辨识结果的振荡幅值和稳定性的影响,在t[0.3-0.33],J[0.0007-0.00095]区间取值,可得出局部放大图如图7(b)所示。

图6 不同增益系数时辨识结果局部放大图
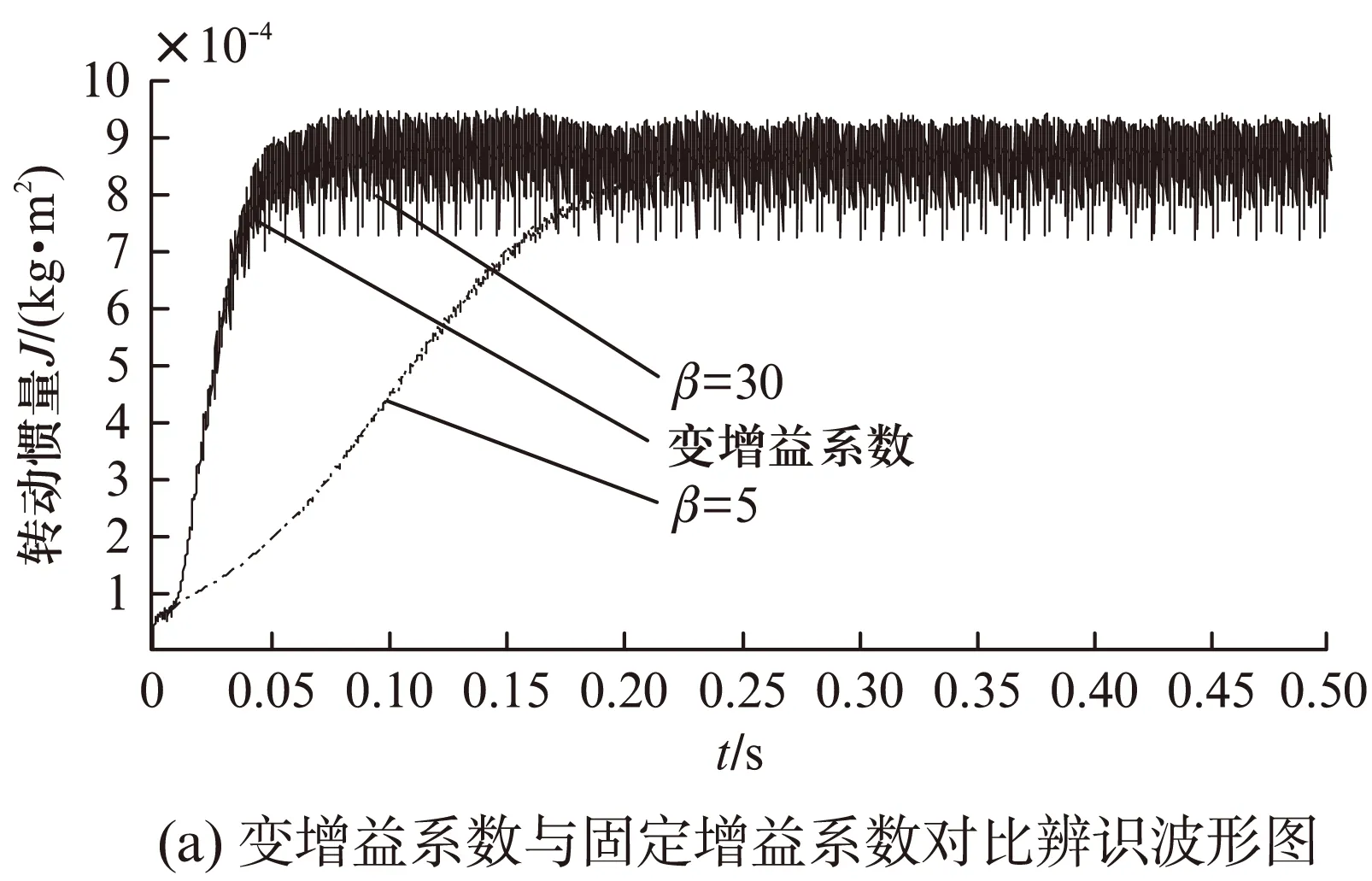
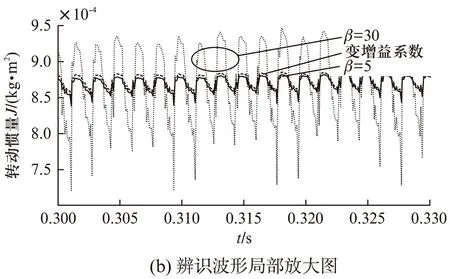
图7 变增益系数法和β=5、β=30的转动惯量辨识
由图7(a)对比波形可知: 变增益系数法与固定增益β=30时转动惯量辨识结果的收敛时间约为0.04s,收敛速度较快;当β=5时,收敛时间为0.25s,收敛时间长,收敛速度较慢。由图7(b) 振荡幅度比较波形可知,变增益系数法与固定增益β=5时辨识结果的振荡幅度较小,辨识误差为2.3%;当β=30时,振荡幅度较大,辨识参数误差为10.5%。所以,采用变增益系数法的永磁同步电机转动惯量辨识,具有收敛速度快,辨识精度高,能有效抑制辨识结果振荡的优点。
4 结 语
本文在分析MRAS转动惯量辨识的基础上,给出了一种变增益系数算法的研究和实现方法,并通过软件仿真验证了理论的正确性。
可以得出,采用变增益系数法的转动惯量辨识系统在收敛速度方面比采用固定增益系数的转动惯量辨识收敛速度快;在稳定性方面,转动惯量辨识精度可提高8%,稳定性较好。因此,变增益系数法可同时获得稳定性与收敛速度两方面的优势,具有收敛时间短、抑制辨识参数振荡和参数辨识精度高等特点。
[1]丁信忠,张承瑞,李虎修,等.永磁同步电机的转动惯量辨识及状态估计[J].山东大学学报(工学版),2012,42(2): 70-77.
[2]DU S, ZHAO S H, CHEN Y S. Inertia identification for speed control of PMSM servo motor[J]. College of Electrical Engineering, 2010,32(3): 1- 4.
[3]徐东,王田苗,魏洪兴.一种基于简化模型的永磁同步电机转动惯量辨识和误差补偿[J].电工技术学报,2013,28(2): 126-131.
[4]卢少武,唐小琦,宋宝.伺服系统转动惯量辨识及其应用[J].微电机,2011,44(10): 41- 43.
[5]刘旭,阮毅,张朝艺.一种异步电机转动惯量辨识方法[J].电机与控制应用,2013,40(5): 29-35.
[6]韩亚荣,邱鑫,朱德明.永磁交流伺服系统转动惯量辨识方法[J].电工电能新技术,2013,32(3): 36- 40.
[7]梁骄雁.永磁同步电机转动惯量辨识的研究[D].南京: 南京航空航天大学,2011.
[8]GUO Y J, HUANG L P, MURAMATSU M. Reserch on inertia identification and auto-tuning of speed controller for AC servo system[C]∥Proceedings of the Power Conversion Conference-Osaka, 2002: 896-901.
[9]毛丁辉,邱建琪,史涔溦.基于转动惯量的异步电机参数自整定系统研究[J].机电工程,2015,32(6): 830-835.
[10]夏加宽,盛丽君.转台系统转动惯量辨识与控制器参数自调整[J].沈阳工业大学学报,2008,30(6): 605-609.
[11]NIU L, XU D G, YANG M, et al. On-line inertia identification algorithm for PI parameters optimization in speed loop[J]. IEEE Transactions on Power Electronics, 2015,30(2): 849-859.
[12]姚磊,邱鑫,王慧贞,等.永磁交流伺服系统转动惯量辨识方法[J].电机与控制应用,2013,40(5): 29-35.
[13]姬宣德.基于模型参考自适应的异步电动机无速度传感器DTC[J].微特电机,2010,38(5): 63-67.
[14]张华强,严洪峰,冷艳礼,等.基于模型参考自适应的PMSM在线辨识研究[J].电机与控制应用,2015,42(12): 3-6.
[15]王庆龙,张崇巍,张兴.基于变结构模型参考自适应系统的永磁同步电机转速辨识[J].中国电机工程学报,2008,28(9): 71-75.
[16]沈艳霞,刘永钦.基于改进型模型参考自适应的PMSM参数辨识[J].电气传动,2009,39(5): 47-50.
[17]王伟华,肖曦.基于电感辨识的PMSM电流自适应增量预测控制[J].电机与控制学报,2014,18(2): 75-82.
Inertia Identification of Permanent Magnet Synchronous Motor Based on Improved Model Reference Adaptive System Algorithm
WANGFeiyu,TIANJingcheng,ZHUOKeqiong,ZHAOChaohui
(College of Electrical Engineering, Shanghai Dianji University, Shanghai 201306, China)
According to the algorithm’s problem which could not acquire performance both in the stability and response speed, introduced the principle of the inertia identification of permanent magnet synchronous motor using model reference adaptive, and studied the function of adaptive gain coefficient in PMSM’s rotational inertia identification algorithm. Present a novel method to identify the inertia which could change the gain coefficient in real time was presented, and the simulation in MATLAB/Simulink was given. The simulation results showed that the novel method had the performance of fast convergent speed, small oscillation amplitude results and good stability.
permanent magnet synchronous motor(PMSM); model reference adaptive system(MRAS); inertia identification
王飞宇(1990—),男,硕士,研究方向为电机驱动和控制。
赵朝会(1963—),男,博士,教授,研究方向为电力电子及电力传动。
TM 351
A
1673-6540(2016)08- 0063- 05
2016-03-23
