SAR图像舰船目标快速检测方法研究*
2016-10-25王智勇田金文
王智勇 窦 浩 田金文
(华中科技大学自动化学院多谱信息处理技术国防科技重点实验室 武汉 430074)
SAR图像舰船目标快速检测方法研究*
王智勇窦浩田金文
(华中科技大学自动化学院多谱信息处理技术国防科技重点实验室武汉430074)
随着SAR图像分辨率的不断提高,传统CFAR检测算法由于速率较慢,已经不能满足实际应用的需求。针对高分率SAR图像,提出了一种两级舰船目标快速检测算法。第一级采用改进的最大熵双阈值检测算法将图像分割为目标、疑似目标、背景三部分;第二级采用改进的双参数CFAR检测算法,在第一级结果基础上进行自适应二次检测,最后得到舰船目标。通过真实SAR图像数据实验表明,提出的算法具有良好的检测性能,更符合实际高分辨率SAR图像舰船目标检测的应用需求。
合成孔径雷达SAR;舰船检测;CFAR;最大熵双阈值检测算法;快速算法
Class NumberTN957.52
1 引言
合成孔径雷达(SAR)作为一种微波主动式传感器,具有全天时、全天候对地观测的能力,被广泛应用于海洋观测、舰船监控等方面。由于舰船自身的结构特点和船体与海面之间形成的二面角反射,使得舰船成像有高于海面的信号反射强度[1],检测算法都是基于这一特点来实现的。常用的舰船检测算法可以分为四种[2]:基于统计特征的舰船检测(CFAR);基于图像处理的舰船检测;基于模板的舰船检测(SUMO系统)[3];基于多/全极化特征的舰船检测。其中应用最多的是基于统计模型的恒虚警率(CFAR)检测算法[4]。
实际应用中,要求对SAR图像中的目标实现快速检测。传统的CFAR检测算法处理速率较慢,勉强能满足中低分辨率的SAR图像的要求。但随着高分辨率SAR图像应用的普及,亟需对原始的检测算法进行改进。本文提出了一种两级舰船检测算法,第一级采用改进的最大熵双阈值检测算法,第二级在其基础上采用双参数CFAR算法对疑似目标区域进行二次检测。由于CFAR算法对舰船尺寸敏感,滑动窗口大小的设置会严重影响到算法性能,实际应用中常需要人为设置。本文算法在第二级检测前,对第一级的检测到的目标像素进行聚类分析估算出舰船目标的尺寸,自动设置第二级CFAR滑动窗口大小,提高了算法自适应性。同时还剔除了滑动窗口背景窗中的强像素点,避免其对背景分布参数估计的影响,提高了算法的准确性。最后通过实验表明本文算法能快速准确地从SAR图像中检测出舰船目标。
2 舰船检测算法
2.1改进的最大熵双阈值检测算法
最大熵双阈值检测算法是在种劲松[5]在KSW[6]最佳熵门限法基础上提出的。算法原理是统计SAR图像各灰度值出现概率,利用双阈值将灰度值分为三部分,每部分熵值之和为总的熵值。使得总熵值最大的一组阈值即为所需阈值,其中较大者为目标阈值,较小者为海洋背景阈值。
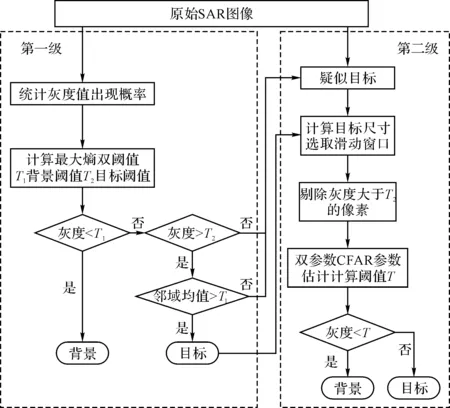
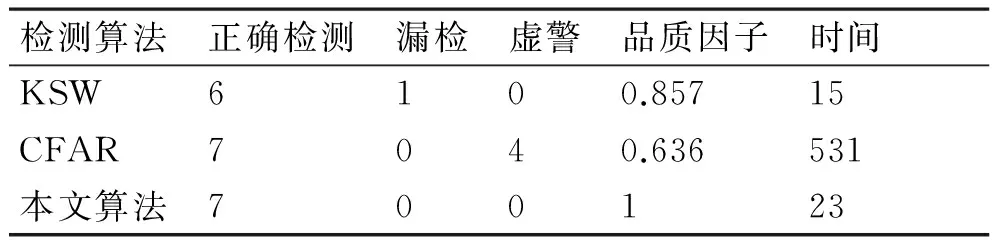
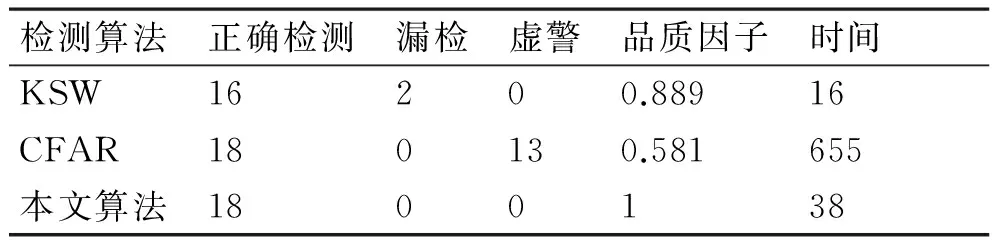
设阈值t1和t2将SAR图像灰度值分为三部分(0 (1) (2) (3) 其中,pi为灰度值为i时的概率,P1,P2,P3为三部分所占概率。 总熵为 H(t1,t2)=H1+H2+H3 (4) 最佳阈值T1和T2为 (5) 由于算法最后检测只用到了目标阈值,为了充分利用数据,提高算法的可靠性,本文对其进行了改进。在最后目标判别阶段,对于灰度值大于目标阈值的像素,计算其邻域灰度均值,对于邻域均值大于背景阈值的像素才认为是目标像素。这样对斑点噪声和舰船目标的旁瓣部分起到一定的抑制作用,降低了出现虚警的概率,提高了算法的可靠性。但比较均值会丢失掉部分目标边缘轮廓信息,因此需要对结果进行二次检测。 2.2恒虚警检测算法 恒虚警检测算法(CFAR)可分为海杂波统计分布模型和CFAR检测器两部分[7]。海杂波统计分布模型直接影响CFAR检测器的性能,常用的统计模型有:高斯分布、对数正态分布、K分布[8]、G0分布[9]等。 双参数CFAR算法是目前应用最为广泛的CFAR算法。双参数CFAR选择高斯分布作为海洋背景杂波统计模型,单元平均CFAR(CA-CFAR)为检测器[10]。算法对每个像素进行滑动窗口检测。滑动窗口分为目标窗口、保护窗口、背景窗口,如图1所示。设置保护窗口是为了保证目标像素被排除在背景窗口外,其大小依赖于图像中舰船目标的尺寸[11]。背景窗口尺寸必须大于保护窗口,并保证参与背景统计分布参数估计的像素足够多,这样才能保证统计分布参数估计的准确性。 图1 CFAR滑动窗口示意图 设SAR图像中的像素点的灰度值为x,p(x)是杂波统计模型的概率密度函数,检测阈值是T,Pfa是虚警概率,那么虚警概率与检测阈值之间有如下关系式: (6) 双参数CFAR的检测准则可以表示为 (7) 其中,μc为估计的杂波均值,σc为估计的杂波标准差,T为将高斯分布带入式(6)计算得到的阈值。 通过滑动窗口的设计可知,CFAR算法是尺度敏感的,选择合理大小的保护窗口,使得没有目标像素泄露到背景窗中需要一定的先验知识。窗口过大或过小都会影响背景分布参数的估计,同时对于目标尺寸差异很大的图像,算法性能会进一步的下降。 2.3两级快速检测算法 综合并改进上述两种算法,本文提出了一种两级快速舰船检测算法。其主要思想是先分离出图像中的潜在目标,然后对不确定的区域进行更精确的二次检测,最后得到检测结果。 算法流程如图2所示。第一级采用改进的双阈值检测算法,将原始图像分为三部分。对于灰度值大于目标阈值且邻域均值大于背景阈值的像素认为是目标像素;灰度值小于背景阈值的像素认为是背景像素;其他像素认为是疑似目标像素。根据第一级的检测结果,估算图像中目标大小范围。第二级采用双参数CA-CFAR检测算法,对第一级中的疑似目标进行滑动窗口检测。其中保护窗大小设为第一级得到目标大小范围的最大值的两倍,这样目标像素就不会泄露到背景窗口中,提高了算法的自适应性,不用人为设定窗口大小。同时对于背景窗口中灰度值大于第一级计算得到的目标阈值的像素不参与海杂波分布模型参数的估计,从而提高背景统计分布参数估计的准确性。最后结合两级检测结果得到舰船目标。 图2 两级快速检测算法流程图 本文提出的算法综合了改进的最大熵双阈值检测和双参数CFAR检测算法的优点。第一级先采用改进最大熵双阈值检测算法对亮度明显的目标像素进行检测,对于目标附近的疑似区域进行了标记,结合目标和背景阈值抑制了斑点噪声和舰船旁瓣的影响。第二级采用精度更高的双参数CFAR算法,利用局部滑动窗口对疑似目标区域进行二次检测,避免了舰船轮廓信息的丢失。同时第一级计算得到目标大小范围用于第二级,增强了算法自适应性。两级的目标检测结果结合形成了最终的舰船目标检测结果。 本文实验数据选择C波段RadarSat-2数据,极化方式为HH,分辨率为3m。实验平台配置为Intel(R)Core(TM)i3-3220 CPU 3.30GHz、4G内存、Windows 7操作系统和VS2010开发环境。每次实验都在相同的条件下执行,各算法运行10次取平均时间的作为结果。 为了检验本文提出算法的性能,将本文算法与传统最大熵双阈值算法(KSW)和双参数CFAR算法进行了对比。其中各算法的参数设置相同,恒虚警概率为10-4,为定量的衡量检测质量,定义品质因子FoM,计算公式为 (8) 式中,Ntt为正确检测的目标个数,Nfa为虚警目标个数,Ngt为实际存在的目标个数。品质因子越高,检测效果越好。 选择若干幅真实SAR图像进行测试,图3和图4列出了其中两幅图像的检测结果。其中图3(a)、图4(a)为原始图像,图中舰船大小都有明显的差异,图3(a)中有7个目标,且海况较为复杂,图像中存在均质和非均质区域,图4(a)中有18个目标,成像时海面较为平静。图3(b)、图4(b)为KSW算法的检测结果,图3(c)、图4(c)为双参数CFAR的检测结果,由于CFAR需要一定的目标大小先验知识,本文选择不同尺寸窗口进行实验,挑选出结果最好的一组,图3(d)、图4(d)为本文算法的检测结果。表1、表2统计了三种算法的检测结果的各项指标。 从结果分析可知KSW算法能较好较快地检测出舰船目标,但没有滑动窗口的局部自适应性,采用全局阈值,容易发生漏检。双参数CFAR算法采用滑动窗口计算阈值,速度较慢,且会产生虚警,检测效果不佳。并且CFAR算法需要舰船目标尺寸作为先验知识,自适应性不强。本文提出的算法综合了KSW和双参数CFAR的优点,能够快速准确的检测出舰船目标。虽然处理速度上稍慢于KSW算法,但利用CFAR算法对疑似区域进行二次检测,提高了结果的准确性。并且,本文算法不需要预先知道目标大小,第一级检测后会对目标尺寸进行估算,比CFAR算法有更强的自适应性。综合检测准确性和处理速率,本文提出的算法性能要优于KSW和双参数CFAR算法。 图3 三种算法舰船目标检测结果一 图4 三种算法舰船目标检测结果二 检测算法正确检测漏检虚警品质因子时间KSW6100.85715CFAR7040.636531本文算法700123 表2 图4检测结果(时间单位:ms) 本文提出了一种基于改进的KSW和双参数CFAR级联的SAR图像舰船目标快速检测算法。先采用KSW双阈值算法检测出明显的目标区域,并将图像分为目标区域、疑似目标区域、背景区域三部分,然后用双参数CFAR算法对疑似目标区域进行二次检测,最后得到检测结果。第一级利用全局阈值检测,很大程度上去除了背景像素,大大减少第二级双参数CFAR的运算量。并且根据第一级检测结果得到目标大小范围,然后用于第二级滑动窗口大小设置,同时在背景窗中剔除强像素点,也提升了算法的自适应能力和背景参数估计的准确性。通过与KSW和双参数CFAR算法的实验结果对比表明,本文算法有良好的检测性能,更符合SAR图像快速舰船目标检测的需求。 [1]Pastina D,Fico F,Lombardo P.Detection of ship targets in COSMO-SkyMed SAR images[C]//Radar Conference (RADAR),2011 IEEE.IEEE,2011:928-933. [2]王超,张红,吴樊等.高分辨率SAR图像船舶目标检测与分类[M].北京:科学出版社,2013:6-12. [3]Crisp D J.The state-of-the-art in ship detection in synthetic aperture radar imagery[R].Defence Science And Technology Organisation Salisbury(Australia)Info Sciences LAB,2004. [4]关键,彭应宁.雷达自动检测与恒虛警处理[M].北京:清华大学出版社,1999:102-105. [5]种劲松,朱敏慧.高分辨率SAR图像舰船目标检测研究[J].探测与定位,2004,14(2):9-14. [6]Kapur J N,Sahoo P K,Wong A K C.A new method for gray-level picture thresholding using the entropy of the histogram[J].Computer vision,graphics,and image processing,1985,29(3):273-285. [7]Jung C H,Yang H J,Kwag Y K.Local cell-averaging fast CFAR for multi-target detection in high-resolution SAR images[C]//Synthetic Aperture Radar,2009.APSAR 2009.2nd Asian-Pacific Conference on.IEEE,2009:206-209. [8]Jakeman E,Tough R J A.Generalized K distribution:a statistical model for weak scattering[J].JOSA A,1987,4(9):1764-1772. [9]Frery A C,Müller H J,Yanasse C C F,etAl.A model for extremely heterogeneous clutter[J].Geoscience and Remote Sensing,IEEE Transactions on,1997,35(3):648-659. [10]艾加秋,齐向阳,禹卫东.改进的SAR图像双参数CFAR舰船检测算法[J].电子与信息学报,2009,31(12):2881-2885. [11]Stastny J,Hughes M,Garcia D,et al.A novel adaptive synthetic aperture radar ship detection system[C]//OCEANS 2011.IEEE,2011:1-7. A Fast Algorithm for Ship Detection in SAR Images WANG ZhiyongDOU HaoTIAN Jinwen (National Key Laboratory of Science and Technology on Multi-spectral Information Processing Technology,School of Automation,Huazhong University of Science and Technology,Wuhan430074) With the improving resolution of SAR Images,the traditional Constant False Alarm(CFAR)algorithm is inefficient for ship detecting.A new two-stage fast method is proposed for high resolution SAR images in this paper.In the first stage,the improved algorithm of entropic double-thresholds proposed by Kapur,Sahoo,Wong(KSW)is implemented.Then the whole image is divided into three parts,including target,suspected target,and background.In the next stage,the improved two parameters CFAR algorithm is applied to the pixels in the suspected target area.Combing results of two stages,ship targets in the image are detected.According to the experiment with real SAR images,the results show that the method proposed in this paper performs very well in ship detecting.The fast algorithm satisfies the demand of ship detection in high resolution SAR images. SAR,ship detection,CFAR,KSW,fast algorithm 2016年3月4日, 2016年4月18日 国家自然科学基金(编号:61273279;61273241)资助。 王智勇,男,硕士研究生,研究方向:SAR图像处理。窦浩,男,博士研究生,研究方向:遥感图像处理。田金文,男,教授,研究方向:遥感图像处理,计算机视觉智能导航控制、图像图形处理与识别。 TN957.52DOI:10.3969/j.issn.1672-9730.2016.09.007
3 实验结果与分析


4 结语
