不确定作战环境下防空反导作战流程建模方法研究*
2016-10-25凌云翔张耀鸿
马 力 凌云翔,2 张耀鸿
(1.国防科技大学信息系统工程重点实验室 长沙 410073)(2.成都武警警官学院 成都 610213)
不确定作战环境下防空反导作战流程建模方法研究*
马力1凌云翔1,2张耀鸿1
(1.国防科技大学信息系统工程重点实验室长沙410073)(2.成都武警警官学院成都610213)
论文以模糊UML建模方法为基础,以不确定环境作战为背景,建立防空反导模型。研究不确定作战环境因素对体系产生的影响。然后将模型映射到模糊Petri网中,量化不确定因素,并对防空反导模型进行不确定环境实验验证,探究防空反导作战流程中的关键不确定因素和关键活动节点,为拓展不确定作战环境中的体系对抗模型奠定基础。
模糊UML;模糊Petri网;防空反导;不确定性
Class NumberTP391.9
1 引言
高速化、多样化和隐身的空袭目标以及超视距、精确打击和电子干扰的空袭方式使得战场环境信息的复杂化和模糊化成为了常态,而这对防空反导体系的敏捷性、抗毁性和适应性建设有了更高要求。而作战流程是组成防空反导体系的重要部分,它包含作战节点所涉及的每个活动以及活动之间的连接,可以反映体系作战的具体过程。
目前,有较多的防空反导体系建模研究,例如文献[1]结合对象Petri网对防空反导体系建模仿真,文献[2]建立了一个防空C3I系统模型,文献[3]对网络化防空反导体系的作战过程进行了建模与仿真,对防空反导流程的研究也不少,例如文献[4]运用UML和Petri网来构建拦截导弹指挥活动模型。这些研究应用了不同的方法对体系或者是指挥活动等内容建模,直观明了地阐述了体系对抗的过程,但对于体系中存在的不确定因素进行的讨论还比较少。
本文在前人研究[5~7]的基础上,应用能描述不确定信息的模糊UML和可以量化分析不确定信息的模糊Petri网两个工具来对防空反导体系中的作战流程进行建模。本文以典型的防空反导系统为模型原型,对系统所处的不确定作战环境进行分析,提出模糊化的UML活动图在不确定作战环境下的防空反导体系建模中的应用,并提出相应的模糊UML活动图到模糊Petri网的转化算法,并验证了不确定环境因素对防空反导的影响以及该模型对于研究确定环境下防空反导的可行性和意义。
2 不确定作战环境下防空反导的作战流程
2.1防空反导作战过程描述
防空反导的作战要素包括预警卫星、雷达网、防空指挥中心、导弹拦截部队等,其防空过程有日常观测、探测预警、识别跟踪、轨迹估算、拦截对抗和效果评估等多个阶段,每个阶段之间都指控和数据上的交互关系。优秀的防空反导系统必须具备预警时间早、响应时间短、捕捉精度高、拦截效果好
等特点和优势,以典型的防空反导系统为例,其作战过程如图1所示。
来袭导弹一发射,反导拦截过程[8]即开始:
首先高轨预警卫星在主动探测过程中发现来袭目标(红外敏感探测来袭目标尾焰的强红外辐射),分析来袭目标参数并将判断结果上传至防空指控中心;随后,防空指控中心结合当前敌我双方政治局势、军事局势等做出初步判断并及时引导低轨预警卫星或者远程预警雷达进行跟踪探测(视具体情况选择),分析来袭目标的运行轨迹、攻击目标、攻击方式、飞行时间等关键信息;在拟合轨迹之后,由指挥中心的指挥参谋人员快速比对数据库资料并依据作战经验制定拦截方案并下达拦截命令;导弹部队接收命令之后立即展开拦截活动,直至将目标摧毁,并实时向上级汇报拦截情况。
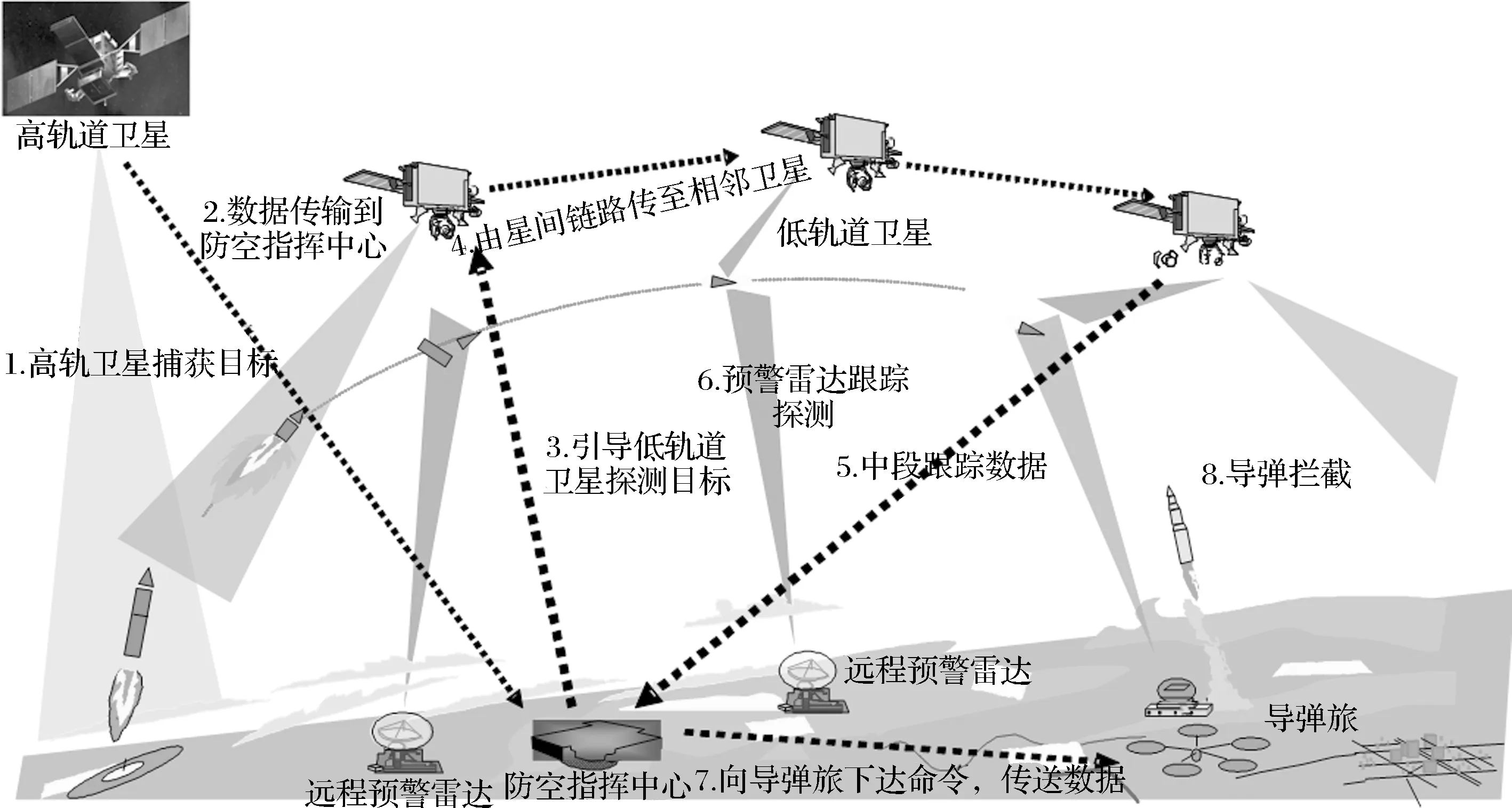
图1 防空反导作战过程描述图
2.2不确定作战环境
对于作战环境这个概念以及划分有着几种不同的意见,本文所讨论的作战环境是由影响作战行动和指挥决策的相关自然环境、社会环境和军事环境构成的综合环境系统。其中自然环境主要包括地形、气象和水文等要素;社会环境主要包括人文环境、经济状况、交通运输、通信与传媒情况和国际社会背景等要素;军事环境主要包括对抗双方的作战力量、武器装备、信息系统、战场建设等要素[9]。依据以往防空反导的经验和一般性作战规律,我们将结合不确定作战环境的内涵,将防空反导过程中关键的不确定作战环境因素归纳如表1所示。

表1 防空反导体系中的关键不确定作战环境因素
3 防空反导作战流程建模
UML是一种面向对象的建模语言,它支持面向对象的分析与设计,还支持从需求分析开始的软件开发的全过程。但该方法并不能描述不确定的信息,因此本文对该方法进行拓展,提出模糊UML模型,主要分析FUML活动图的建模。
3.1UML活动图
一个活动图通常包括六个基本的要素[10]:活动、事件、条件、变迁和终态。如图,初态和终态分别使用●和⦿表示,表示活动的开始和结束。每个活动图有且只有一个初态,但可能有多个终态,每个活动用圆角矩形框表示,描述了软件的工作序列,每个活动包含若干事件和条件,条件决定了一个活动是否可以发生,一个活动的发生代表这个事件的完成。依据第一章第一节的防空反导作战过程的描述,我们得到防空反导作战流程活动图,如图2所示。
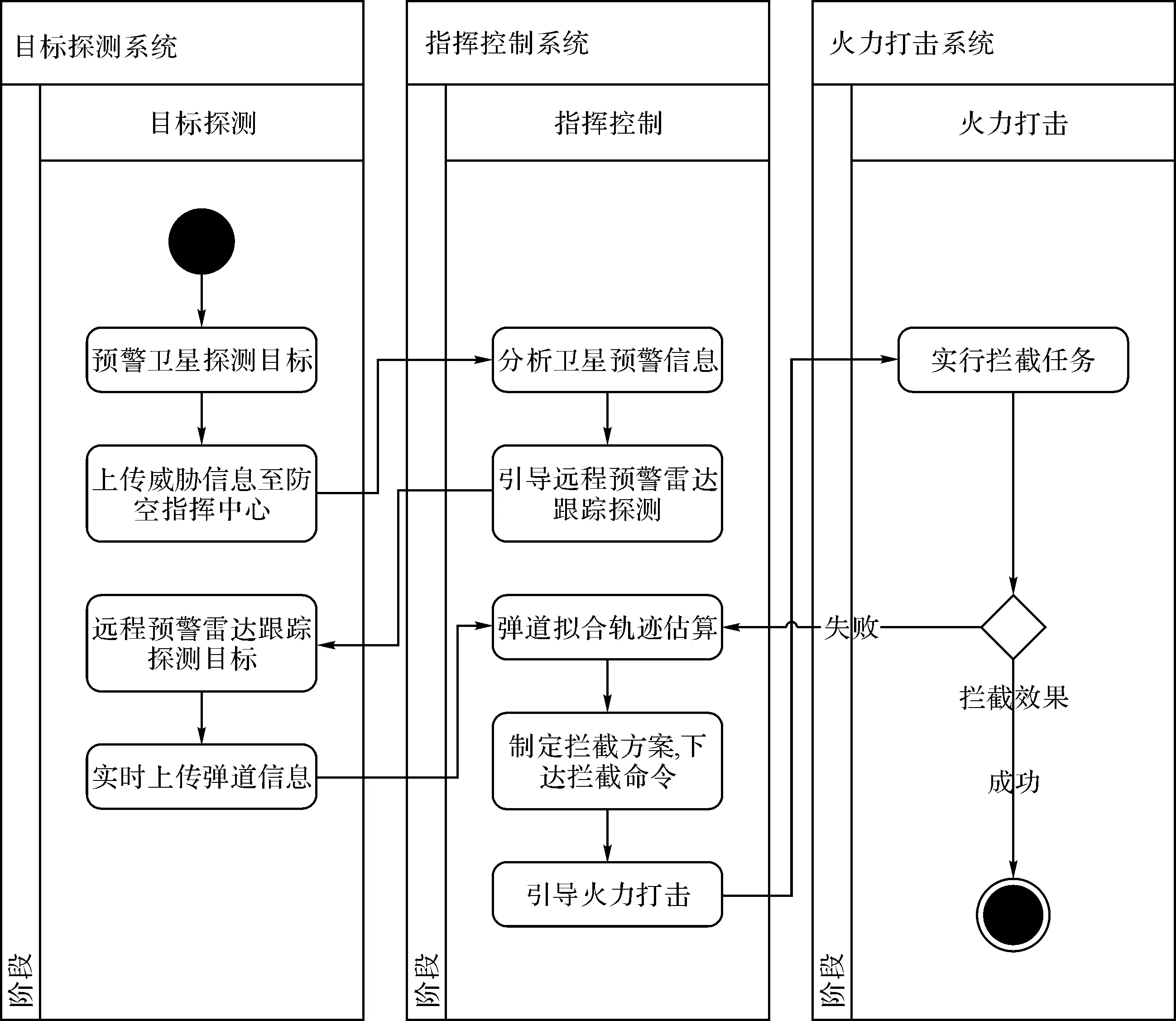
图2 防空反导指挥流程活动图
3.2FUML活动图
我们设计模糊规则对该活动图进行模糊化,模糊规则结构如下所示:
Fuzzy Rule (with ωidegree)#
Fuzzy Condition :If condition_i(Cij)is satisfied (with Sij0degree);
Fuzzy Event :event_i (Ti)(with τithreshold)
Then action continues
模糊规则是用于表示一个对象在现实世界中遵循的规则,可以使主动地,也可以是推理的。上述的规则举例解释如下:
Rule:if C11and C12,… and C1nthen action
如果一个活动中的每个条件都在可信度下被满足,并且大于事件触发阈值要求,则事件被触发,活动完成,继续下一个活动。
活动图的每个要素都可以转换成一个模糊活动图的相应要素,转换关系如下表2所示。

表2 UML活动图和FUML活动图要素对比一览表
以某防空反导部队的体系建模为案例,考虑不确定环境影响因素,以上文中的活动图为基础,考虑到模糊UML的计算维度和实际作战过程中出现不确定因素可能性更大的作战活动等多个因素,本文将部分活动进行了较为合理地合并,模糊转化的过程如下所示:
1)对于第一个活动预警卫星探测目标信息,有如下转化:
Rule#1(with ω10degree)
Event:the satellites detects the information of the targets(t1)(with τ1threshold)
Condition:If the satellites work normally(C11)(with S110degree);
If the targets are in the detecting scopes of the satellites(C12)(with S120degree);
Action:the process of transportation continues
[going to the next stage]ELES invalid exception
2)对于第二个活动上传威胁情况至防空指控中心,有如下转化:
Rule#2(with ω20degree)
Event:targets’ information is transported to the center of command and control (t2)(with τ2threshold)
Condition:If the transportation channels work normally (C21)(with S210degree);
Action:the process of analyzing and tracking continues
[going to the next stage]ELES invalid exception
3)对于第三个活动分析卫星预警信息并引导雷达跟踪探测,有如下转化:
Rule#3(with ω30degree)
Event:information is analyzed correctly and the order of tracking the targets is given to relative radars(t3)(with τ3threshold)
Condition:If the commander and officers work together normally (C31)(with S310degree);
If the transportation channels work normally(C32)(with S320degree);
Action:the process of tracking continues
[going to the next stage]ELES invalid exception
4)对于第四个活动远程预警雷达跟踪探测并上传跟踪信息到指控中心,有如下转化:
Rule#4(with ω40degree)
Event:targets are tracked in real time(t4)(with τ4threshold)
Condition:If the radars work normally(C41)(with S410degree);
If the targets are in the detecting scopes of radars(C42)(with S420degree);
If the transportation channels work normally (C43)(with S430degree);
Action:the process of transportation continues
[going to the next stage]ELES invalid exception
5)对于第五个活动弹道轨迹拟合估算并下达作战命令,有如下转化:
Rule#5(with ω50degree)
Event:Trajectories of targets are estimated and then orders are transmitted(t5)(with τ5threshold)
Condition:If the transportation channels work normally (with S510degree);
If the calculation and estimation are processed normally (with S520degree);
Action:the process of interception continues
[going to the next stage]ELES invalid exception
6)对于第六个活动执行作战拦截任务,有如下转化:
Rule#6(with ω60degree)
Event:Perform combat interception mission(t6)(with τ6threshold)
Condition:If the mission is performed in time(C61)(with S610degree);
If the command and fighting perform normally(C62)(with S620degree);
If the targets are in the detecting scopes of the weapon system(C63)(with S630threshold);
Action:the process of the final situation continues
[going to the next stage]ELES invalid exception
4 模型转化和验证
4.1FPN的知识表示方法
定义六元组FPN=(P,T,Δ,Γ,τ(t),S0(p))为模糊Petri网[11],其中:P={p1,p2,…,pn}称为FPN的库所集,表示模糊命题;T={T1,T2,…,Tm}称为FPN的变迁集,表示规则的实现;Δ={δij}为输入矩阵,αij∈[0,1],表示Pi到Tj上的输入关系和权重;当Pi是Tj的输入时,δij等于Pi到Tj输入弧上的权系数αij;当Pi不是Tj的输入时,δij=0;Γ={γij}为输出矩阵,γij∈[0,1],表示Tj到Pi上的输出关系和结论的可信度;当Pi是Tj的输出时,γij等于变迁Tj推出结论Pi的可信度βij;当Pi不是Tj的输出时,γij=0;S=[s1,s2,…,sn]为定义在模糊库所集P上的状态向量,表示各命题可信度,si∈[0,1],i=1,2,…,n,S0=[s10,s20,…,sn0]表示命题的初始可信度。τ=[τ1,τ2,…,τm]为变迁的阈值,τj∈[0,1],j=1,2,…,m。
一般的推理规则可表示为:IF U1(α1)AND U2(α2)AND … Un(αn)THEN D1(β1),D2(β2),…,Dm(βm)
式中:α1,α2,…αn为提前条件的权系数,条件的权系数是规则条件对结论贡献大小程度的度量,满足∑αi=1,i=1,2,…,n;β1,β2,β3,…,βm为每个结论的可信度,满足条件0≤βj≤1,j=1,2,…,m;τ为规则可实现的阈值。用模糊逻辑表达式表示为
U1×α1∧U2×α2∧…∧ Un×αn→D1(β1),D2(β2),…,Dm(βm)
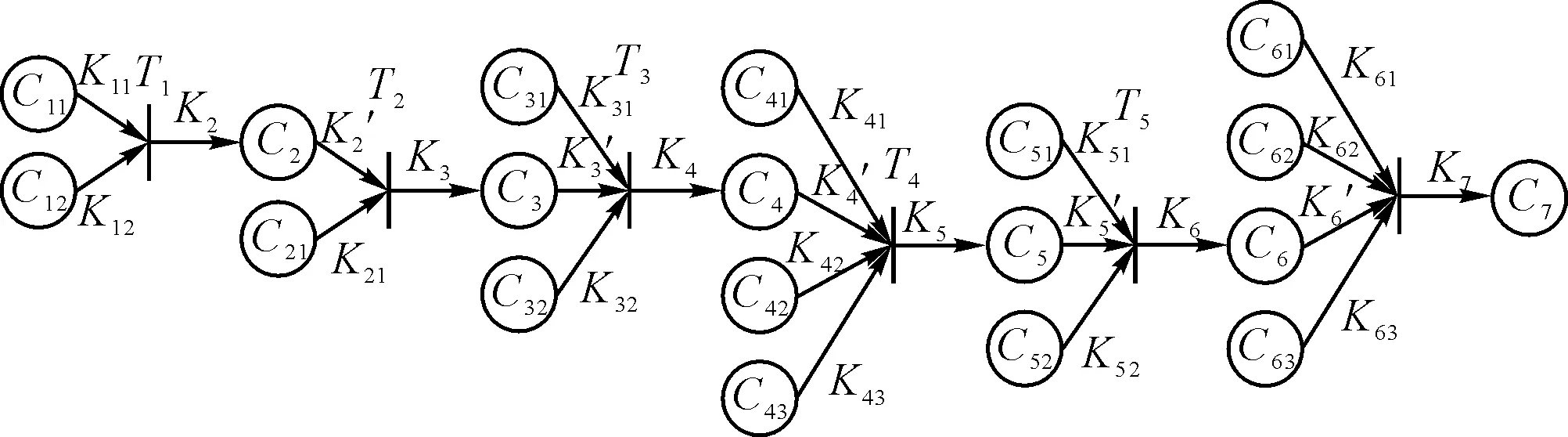
转化为模糊Petri网模型,如图3。
模型中,条件和结论命题用模糊Petri网库所节点表示,推理规则用变迁节点表示,条件的权系数和结论的可信度用输入输出弧的连接强度来表示。
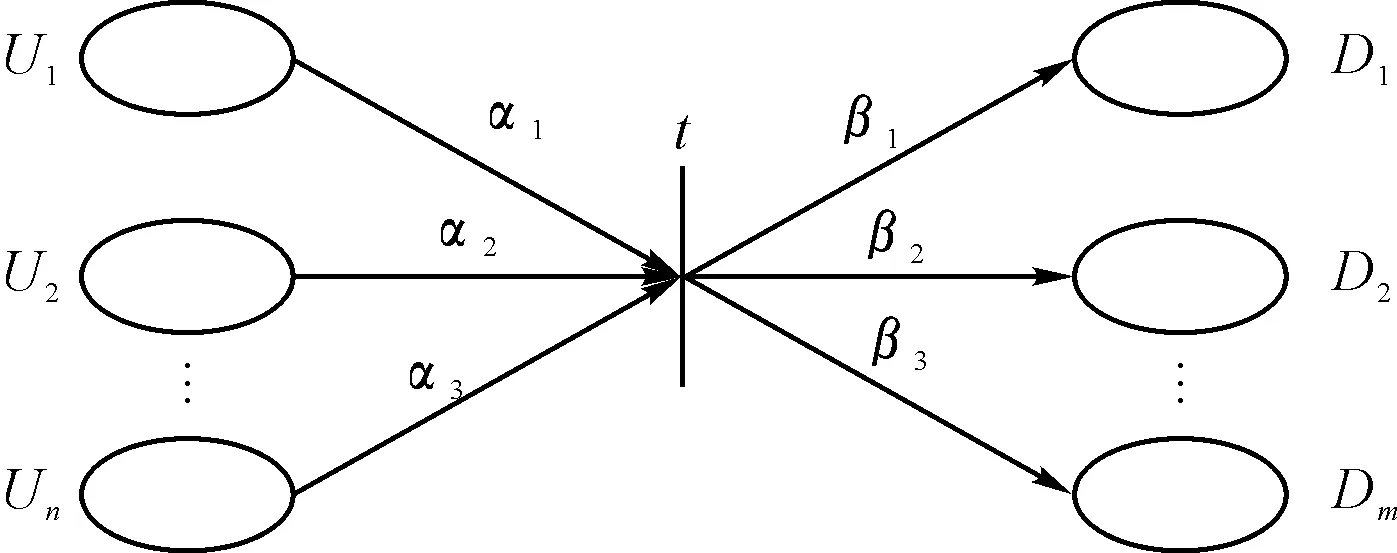
图3 一般性推理规则的模糊Petri网模型
4.2FPN的形式化推理算法
定义以下算子:
⊗∶X⊗Y=Z,X,Y,Z是n×m维向量,zij=xijyij;
⊕∶X⊕Y=Z,X,Y,Z是n维向量,zi=Max(xi,yi);
⊙∶X⊙Y=Z,X,Y,Z是n维向量,if xi≥ yi,zi=1;if xi 推理过程分为七步进行: Step1:等效模糊输入可信度为E=ΔT·S0,即将同一变迁中多个模糊输入按照它们的可信度和权系数等效为一个权系数为1的模糊输入。 Step2:等效模糊输入可信度与变迁阈值的比较结果C=E⊙τ,当等效模糊输入的可信度大于等于变迁阈值时,cj=1;否则cj=0,j=1,2,…,m。 Step3:提出等效模糊输入中可信度小于变迁阈值的输入项:H=E⊗C。 Step4:计算模糊输出库所的可信度S1=Γ·H。 其中S1为m维向量,表示经过第一轮推理后可直接得到的结论命题的可信度。在S1中,不能直接推理得到结论命题的库所,可信度为0。 Step5:计算当前可得到的所有命题的可信度:S1=S0⊗S1。 Step6:用Step5中的S1代替Step1中的S0,反复进行Step1~Step5的迭代,则在第k步推理后,所有命题的可信度为Sk=Sk-1⊕Sk。 Step7:当Sk=Sk-1时,推理计算不再是任何命题的可信度发生变化,结束推理。完整推导算式即为:S=S⊕Γ·H=S⊕Γ(E⊗(E⊙τ))=S⊕Γ((ΔT·S)⊗((ΔT·S)⊙τ)) 4.3防空反导作战流程模型转化 通过上述的概念介绍和定义,给出模糊UML活动图到模糊Petri网的转化算法如下: Step1:对于模糊活动图中的每个活动的变化,确定它们的规则、事件和条件,表示成如表3。 Step2:将活动中的事件映射成为模糊Petri网中的事件变迁,每个事件都有一个发生阈值,把条件映射成为模糊Petri网中的命题库所,每个条件有初始可信度,这个可信度可以由专家知识赋予,每个子命题在触发变迁上的弧上都有一个重要性权重,权重的赋予也可由专家知识来指导。 表3 各重频率分集的频率与字符的对应关系 图4 防空反导作战流程FPN模型 Step3:按照第3节的模糊Petri网的推理算法,带入相应的参数和值进行计算,得出最终状态的可信度。依据专家知识给予每个库所(条件命题)初始可信度,给予变迁(事件命题)约束阈值,并赋予每个弧响应的弧权重,给予相应的规则响应的可信度。 经推算,在正常的未收到干扰的防空反导指挥过程中,拦截作战成功的可信度(活动图达到终态)为0.77(高于本文设定的系统效能阈值0.6),证明目前的指挥作战过程是可信的,拦截成功的概率较大。然而在出现紧急情况(本文设定突发情景为探测卫星未能正常工作)时,防空反导拦截作战成功的可信度为0.58(低于本文设定的体系效能评价阈值0.6),此时使得体系是漏洞大、危险的,拦截成功的概率低于正常值。该模型能够较好地验证防空反导体系在不确定环境作战的效能,并且依据相关训练经验数据和实战数据来发现防空反导体系中的关键活动节点,有助于及时调整防护和应对方案,加强薄弱关键节点的建设,从而整体提升防空反导体系的效能。 本文改进了UML/Petri网在体系建模中不能描述不确定信息的不足,引入模糊规则和模糊推理规则,提出了FUML/FPN方法,并将该方法较好地应用于军事指挥流程建模中,着重探究了面向不确定环境的防空反导指挥流程建模方法,为解决建模中的不确定问题提供了新的思路,也为不确定信息下的军事指挥流程建模提供了参考思路。在之后的研究中会改进模糊Petri网的建模推理算法,并拓展模糊UML的其他视图,以探究整个防空反导体系的模糊化建模方法。 [1]卢聪,凌云翔,张耀鸿.基于对象Petri网的防空反导建模与仿真[J].火力与指挥控制,2015,40(11):39-44. [2]梁建芳.Petri网理论在防空系统中的应用[J].海军大连舰艇学院学报,2002,25(1):60-63. [3]朱智,雷永林,朱一凡.网络化防空反导体系的作战过程建模与仿真[J].国防科技大学学报,2015,37(3):179-184. [4]桂启山,赵新国,李义等.基于UML/Petri网的作战指挥可视化建模与验证[J].指挥控制与仿真,2009,31(5):99-102. [5]张炜钟,王智学,陈剑.一种UML活动图到模糊Petri网的转换算法[J].系统仿真学报,2009,20(Supply):102-106. [6]Ma Z M.Extending UML For Fuzzy Information Modeling in Object Oriented Database[M].Beijing:Idea Group Publishing,2004:66-68. [7]周波,张亚非,陆建江等.基于模糊描述逻辑的模糊UML类图形式化[J].解放军理工大学学报(自然科学版),2010,11(4):386-391. [8]于松书,唐硕.基于Petri网的防空作战过程建模[J].火力与指挥控制,2004(6):48-56. [9]张为华,汤国建,文援兰等.战场环境概论[M].北京:科学出版社,2013:1-5. [10]罗雪山,陈洪辉,刘俊先等.指挥信息系统分析与设计[M].长沙:国防科技大学出版社,2008:132-133. [11]王娜,罗小明.基于模糊Petri网的推理算法在C4ISR系统效能评估中的应用[J].先进制造与管理,2008,27(5):50-52. [12]刘石坚.面向对象模糊Petri网的理论及建模研究[D].长沙:长沙理工大学,2010. [13]郝天保.基于模糊时间Petri网的并行工作流模型研究[D].秦皇岛:燕山大学,2011. [14]梁旭斌,苏宪程,王景昌等.模糊petri网理论定量分析空间信息系统传输能力[J].兵工自动化,2009,28(8):11-14. [15]James Moffat,Thomas Scales,Stuart Tylor,John Medhurst.Quantifying the Need for Force Agility[J].The International C2 Journal,2011,5(1):1-25. [16]牟亮.不确定使命环境下C2组织结构动态适应性优化方法研究[D].长沙:国防科技大学,2011. [17]潘明聪,贺毅辉,徐伟等.不确定性作战任务形式化描述方法[J].指挥控制与仿真,2014,36(3):28-31. [18]张莉,张安.不确定环境下编队对地攻防对抗决策方法研究[J].系统工程与电子技术,2009,31(2):411-415. [19]李香亭,杨风暴,周新宇等.基于模糊Petri网的综合态势分析[J].电子测试,2011(9):43-49. [20]李智生,李俊山.模糊神经Petri网及在武器装备效能评估中应用[J].航天电子对抗,2006,22(5):62-64. Modeling Method of Air Defense and Antimissile Process in Uncertain Battlefield Environment MA Li1LING Yunxiang1,2ZHANG Yaohong1 (1.Science and Technology on Information Systems Engineering Laboratory,National University of Defense and Technology,Changsha410073)(2.Office College of Chinese Armed Police Force,Chengdu610213) Based on the fuzzy UML modeling method,this paper establishes the model of air defense and antimissile in uncertain environment.The impact of uncertain environment factors on the system is studied.Then model is mapped to the fuzzy Petri nets and quantifies the uncertainty factors,and uncertain environment experimental verification is carried out for air defense and antimissile model.Finally,this paper explores the key uncertainties and key nodes of the air defense and antimissile operational process,which aims to expand the combat system model in uncertain battlefield environment. fuzzy UML,fuzzy Petri net,antimissile aerial defense,uncertainty 2016年3月3日, 2016年4月26日 国家自然科学基金(编号:61272336)资助 作者简介:马力,男,硕士研究生,研究方向:指挥控制与指挥决策分析。凌云翔,男,教授,博士生导师,研究方向:信息管理与决策分析。张耀鸿,男,副教授,硕士生导师,研究方向:指挥信息系统。 TP391.9DOI:10.3969/j.issn.1672-9730.2016.09.005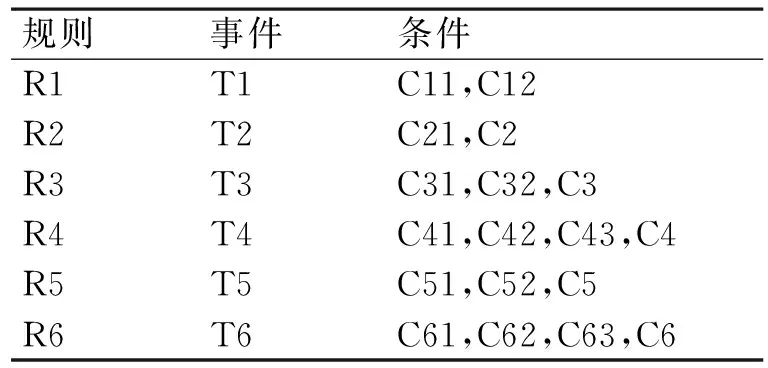
5 结语
