基于旋转坐标的开关磁阻电动机的速度控制
2016-10-22王家军王浩
王家军,王浩
(杭州电子科技大学自动化学院,浙江 杭州 310018)
基于旋转坐标的开关磁阻电动机的速度控制
王家军,王浩
(杭州电子科技大学自动化学院,浙江 杭州 310018)
针对开关磁阻电动机的控制问题,将交流电动机控制中旋转参考坐标的理论引入开关磁阻电动机的速度控制之中。通过旋转参考坐标的变换和一定的处理,可以将开关磁阻电动机的电流参考值分解为相应的相绕组电流,从而实现电流的滞环控制。这种控制方法不仅不需要开关磁阻电动机的模型信息,同时也省略了开关角的计算,并且在不需要转矩脉动抑制措施的情况下就可以获得良好的转矩控制效果。最后,利用Matlab/Simulink给出了2种情况下的转速控制仿真结果,仿真结果表明了设计方法的正确性和有效性。
开关磁阻电动机;速度控制;旋转参考坐标;电流分配策略
作为当前电机驱动领域的一种重要类型的电机,开关磁阻电动机以其优良的控制性能成为电机驱动技术领域的一个重要研究方面。由于开关磁阻电动机的双凸极结构以及运行过程中的磁场高饱和特性,使得开关磁阻电动机的模型具有很强的非线性[1-3]。与普通交流电动机不同,开关磁阻电动机的电感、磁链和转矩不仅与电流有关,而且也和转子的位置有关,这使得人们很难利用解析的方法获得开关磁阻电动机的精确模型[4-5]。因此,到目前为止还没有一个像普通交流电机的矢量控制或者直接转矩控制一样成熟的设计方案,能够完全解决开关磁阻电动机的控制问题。
当前人们对于开关磁阻电动机的位置、速度或者转矩的控制绝大部分依赖于开关磁阻电动机的电感、磁链或者转矩的模型信息,或者至少需要对开关角进行计算。文献[1]通过磁链特性和转矩特性曲线的优化实现了开关磁阻电动机的转矩分配函数控制。文献[6]利用电感线性区的模型实现了开关磁阻电动机的无位置传感器控制。文献[7]利用磁链模型实现了开关磁阻电动机开关角的优化控制。由于开关磁阻电动机的模型是通过实测或者有限元的方法获得,而实际运行中开关磁阻电动机的模型数据会或多或少发生变化,因此控制器对于模型数据的依赖会降低系统控制的性能。
鉴于开关磁阻电动机特殊的工作原理及其驱动电路与普通交流电机的不同,人们很难将交流电动机解耦的思想引入开关磁阻电动机的控制。文献[8]首次将交流电动机dq旋转坐标变换的思想引入开关磁阻电动机的控制。然而在文献[8]中实现速度控制的过程中,其控制仍然依赖于开关磁阻电动机的模型,因此其控制方法还是存在较大的局限性。
本文借鉴文献[8],将参考电流通过旋转坐标系的变换,分配到相应的相电流,并经过一定的处理实现电机电流的闭环控制。该设计方案不但可以消除控制器的设计对于开关磁阻电动机模型的依赖性,同时也不需要对开关角进行计算,另外该控制方法对降低开关磁阻电动机的转矩脉动也具有非常重要的意义。
1 开关磁阻电动机的旋转参考坐标变换
在一般电动机的控制过程中,速度控制环的输出即可认为是电流环的给定值,也可认为是转矩环的给定值。在一般感应电动机或者永磁同步电动机的矢量控制(或者磁场定向控制)过程中,可以将q轴电流和d轴电流经过旋转参考坐标的变换获得电机的三相控制电流[9]。基于这种电动机控制设计的思路,本文以四相8/6极开关磁阻电动机为研究对象,借助于旋转参考坐标变换的方法获得开关磁阻电动机的四相有效控制电流。四相8/6极开关磁阻电动机旋转参考坐标变换的步骤可以分为如下3个方面。
1.1电流的分配
在保持变换前后功率守恒的条件下,四相8/6极开关磁阻电动机电流给定值分配到电动机四相电流的坐标变换可以表示为

式中:ix(x=a,b,c,d)为经坐标变换之后的相电流;irx(x=d,q)分别为速度环的输出给定电流和磁链虚拟控制电流;α为相位调整系数。
参考交流电动机矢量控制的思想,设定ird=0。由式(1)可以看出,如果将电流ix(x=a,b,c,d)视为是电流矢量,则电流ia与ic反向,而电流ib与id反向,因此可以定义如下一种旋转参考坐标变换:

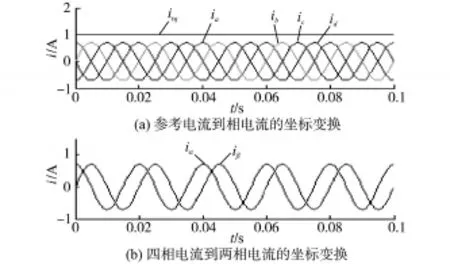
图1 电流变换Fig.1 Transformation of the current
式中:ix(x=α,β)为α,β轴电流。
针对某一电流给定值1,经过式(1)和式(2)变换的结果如图1所示。
1.2电流方向的正向化处理
由图1可以看出,经参考电流到相电流的分配处理所获得的四相电流包含负电流部分,由于开关磁阻电动机特殊的供电模式,这种电流模式是无法实现的,因此对于前面所获得的四相电流需要进行进一步的处理。鉴于开关磁阻电动机的四相电流具有一定的对称性,某一相电流的负半部分可以采用相邻的两相或者三相电流的正向电流进行合成。四相对称电流到四相正向电流的处理可以通过如下方程式实现:

s(ix)可以表示为

式中:x=a,b,c,d。
基于图1所获得的开关磁阻电动机的四相电流,经过正向化处理之后的开关磁阻电动机的相电流波形如图2所示。
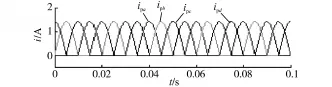
图2 相电流的正向化处理Fig.2 Positive processing of the current
1.3电流宽度和换相重叠区的处理
由图2可以看出,虽然获得了开关磁阻电动机相似的相电流,但是由于每个时刻都存在两相同时导通,即每个时刻都存在电流的重叠区域,这不利于开关磁阻电动机的高效运行。因此为了提高开关磁阻电动机运行的效率和控制的灵活性需要对换向重叠区域进行有效的控制,即需要对前面所获得的正向相电流按照开关磁阻电动机控制的要求进行必要的整形。
为了控制相电流的宽度,定义如下宽度控制函数wx(θ)为
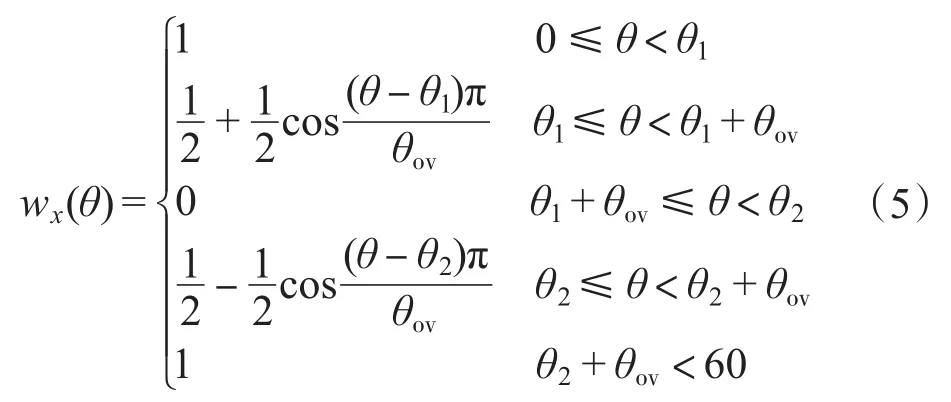
式中:x=a,b,c,d;θ为转子的位置,(°);θov为换向重叠角。
通过对不同的θ1,θ2和θov选择可以很容易控制开关磁阻电动机电流的宽度和重叠区域。开关磁阻电动机的实际控制电流的计算可以根据如下方程式

式中:x=a,b,c,d。
定义如下2个电流

经过宽度和重叠区处理之后的电流iga与igc不可能同时作用,igb与igd不可能同时作用,igα和igβ相当于同时作用的2个有效电流。假定开关磁阻电动机相电感上升期间的斜率(x=a,b,c,d)为常数,开关磁阻电动机的电磁转矩满足

在很多情况下经过旋转坐标变换所获得的开关磁阻电动机的相电流与实际反馈电流之间存在相位的差异,因此需要能够对开关磁阻电动机的位置反馈进行校正,可以采用如下方法对反馈角度进行调节

式中:θ为实际控制角;θf为反馈转子位置角度;θr为电流反馈校正角。
利用式(5)和式(6),电流的宽度控制函数和经过处理过的相电流如图3所示。经过电流的分配、相电流的正向化处理、电流宽度与重叠区的处理之后,所获得的相电流完全可以经过滞环或者PID控制实现开关磁阻电动机电流的闭环。
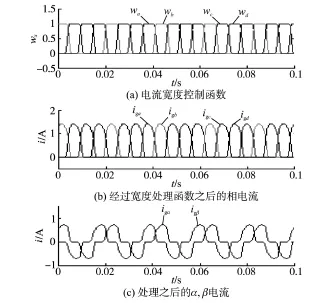
图3 相电流宽度处理Fig.3 Width processing of the phase current
2 开关磁阻电动机的仿真模型
为了验证前面电流旋转参考坐标变换方法的有效性,开关磁阻电动机的仿真数据采用某国产四相8/6极开关磁阻电动机的实验数据。开关磁阻电动机的额定数据为:极数8/6,额定功率0.37 kW,额定电压220 V,额定电流4.5 A,相绕组电阻1.82 Ω,最大相电感32.64 mH,最小相电感7.23 mH,调速范围100~2 000 r/min。开关磁阻电动机的模型如图4所示。

图4 SRM仿真模型Fig.4 Simulation model of the SRM
经实验所获得转矩和磁链模型两维和三维图分别如图5和图6所示,其中0°为定、转子对其位置点,90°为非对其位置点。在仿真部分的转矩和磁链模型是通过查两维数据表的方式获得相关的数据。
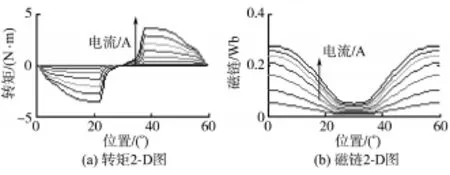
图5 转矩和磁链两维图Fig.5 2-D figure of torque and flux-linkage

图6 转矩和磁链三维图Fig.6 3-D figure of torque and flux-linkage
3 仿真和分析
基于旋转参考坐标的开关磁阻电动机速度控制系统的仿真结构框图如图7所示。由图7可以看出,采用旋转参考坐标进行控制的开关磁阻电动机的控制结构与感应电动机的矢量控制具有很大的相似性。速度控制器采用PID控制器,电流控制器采用滞环控制器,开关磁阻电动机的功率驱动电流采用四相不对称桥进行驱动。功率驱动电路采用硬开关模式,即不对称桥的上、下2个功率驱动管同时导通或者关闭。
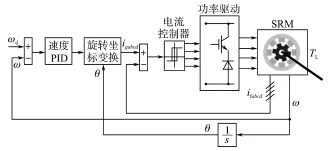
图7 SRM仿真结构图Fig.7 Simulation structure of the SRM
为了验证旋转参考坐标电流变换控制方法对于开关磁阻电动机控制的有效性,下面给出两种速度控制的仿真。开关磁阻电动机的给定速度为ω=500r/min,负载转矩初始值为TL=0.5 N·m,在0.05 s负载增大为TL=1.0 N·m,开关磁阻电动机速度控制的仿真结果如图8所示。
由仿真结果可以得出如下结果。
1)由图8 a、图8 b可以看出,经过直接电流分配所获得的iα和iβ的向量图为一个正方形,而电流igα和igβ的向量图接近于圆形,也就是说igα和igβ可以保证转矩趋于恒定。由图8e也可以看出,系统的设计可以保证开关磁阻电动机转矩的恒定。
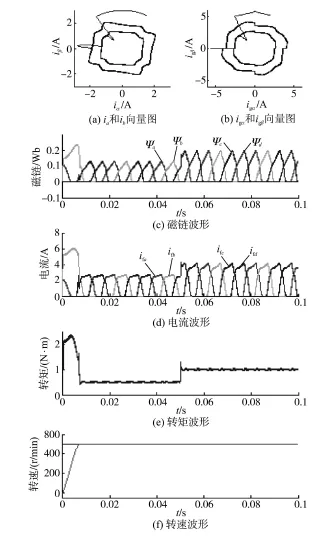
图8 SRM仿真情况Fig.8 Simulation results of SRM
2)由图8c、图8 d可以看出,经过电流旋转参考坐标的处理,可以成功实现开关磁阻电动机相磁链和相电流的有效控制。
3)在速度控制设计的过程中,系统没有专门设计抑制开关磁阻电动机转矩脉动的环节,然而由图8e可以看出,该设计方法能够有效抑制开关磁阻电动机本身由于结构设计和驱动方式而导致的转矩脉动问题。
4)由图8f可以看出,该设计方法具有优良的速度跟踪控制性能,能够实现快速的正、反转速度跟踪,并且对于负载转矩的扰动具有很好的抑制性能。
5)在控制设计的过程中,除了需要开关磁阻电动机的结构(定转子的极数)信息之外,本控制方法完全不依赖于开关磁阻电动机的任何模型数据。
4 结论
借助于交流电动机矢量控制的思想,本文将一种新颖的电流旋转参考坐标变换的方法应用开关磁阻电动机的速度控制,本文的主要新颖之处表现为4个方面:1)通过电流的分相、正向化处理以及电流宽度和重叠区的处理实现了开关磁阻电动机的电流闭环控制。2)该设计方法消除了速度控制器对于开关磁阻电动机模型的依赖性,这对于开关磁阻电动机的控制是非常重要的。3)该设计方法没有特意去采取抑制开关磁阻电动机转矩脉动的措施,设计方法在抑制开关磁阻电动机的转矩脉动方面具有良好的控制效果。4)通过对给定电流进行旋转参考坐标的变换,该设计方法在开关磁阻电动机速度控制的过程中完全可以不考虑开关角的计算问题。
[1]曹家勇,周祖德,陈幼平,等.一种开关磁阻电动机转矩控制的新方法[J].中国电机工程学报,2005,25(6):88-94.
[2]丁文,梁得亮.一种开关磁阻电机非线性磁链与转矩建模方法[J].电机与控制学报,2008,12(6):659-665.
[3]汤小君,易灵芝,朱建林,等.非线性模型的开关磁阻电动机转矩脉动抑制[J],电机与控制学报,2007,11(2):120-124.
[4]Cheok A D,FukudA Y.A New Torque and Flux Control Method for Switched Reluctance Motor Drives[J].IEEE Transactions on Power Electronics,2002,17(4):543-557.
[5]常国强,詹琼华,边敦新.开关磁阻电机驱动系统场路直接耦合的数学模型[J].中国电机工程学报,2001,21(3):70-73.
[6]蔡骏,邓智泉.基于电感线性区模型的开关磁阻电机无位置传感器技术[J].中国电机工程学报,2012,32(15):114-123.
[7]Mademlis C,Kioskeridis I.Performance Optimization in Switched Reluctance Motor Drives with Online Commutation Angle Control[J].IEEE Transactions on Energy Conversion,2003,18(3):448-457.
[8]Husain T,Elrayyah A,Sozer Y,et al.DQ Control of Switched Reluctance Machines[C]//Twenty-eighth Annual IEEE Applied Power Electronics Conference and Exposition,2013:1537-1544.
[9]Bose B K,Modern Power Electronics and AC Drives[M].Prentice Hall,2002.
[10]Gobbi R,Sahoo N C,Vejian R.Experimental Investigations on Computer-based Methods for Determination of Static Electromagnetic Characteristics of Switched Reluctance Motors[J].IEEE Transactions on Instrumentation and Measurement,2008,57(10):2196-2211.
Speed Control Research of Switched Reluctance Motor Based on Rotating Reference Frame
WANG Jiajun,WANG Hao
(School of Automation,Hangzhou Dianzi University,Hangzhou 310018,Zhejiang,China)
The rotating reference frame theory of the AC motor was drawn into the speed control of switched reluctance motor(SRM)to solve its control problems.The phase currents of the SRM could be acquired from the reference current through the transformation of rotating reference frame and some special processing.Then the hysteresis current closed-loop control could be realized.The proposed control method needed not the model information of the SRM,and the turn-on and turn-off computation were all omitted.In addition,excellent torque control performance of the SRM could be achieved without the special measure to reduce the torque ripple.At last,two cases of simulation results are given with Matlab/Simulink.The simulation results certify the rightness and effectiveness of the proposed scheme.
switched reluctance motor;speed control;rotating reference frame;current distribution strategy
TM352
A
2015-08-03
修改稿日期:2016-05-11
国家自然科学基金项目(61273086)
王家军(1975-),男,博士,教授,Email:wangjiajun@hdu.edu.cn