控制方向未知分数阶混沌系统的Nussbaum增益同步
2016-10-22吴梅程继红余名哲张友安
吴梅,程继红,余名哲,张友安
(1.烟台毓璜顶医院消防监控室,山东烟台264001;2.海军航空工程学院a.科研部;b.控制工程系,山东烟台264001;3.91526部队,广东湛江524064)
控制方向未知分数阶混沌系统的Nussbaum增益同步
吴梅1,程继红2a,余名哲3,张友安2b
(1.烟台毓璜顶医院消防监控室,山东烟台264001;2.海军航空工程学院a.科研部;b.控制工程系,山东烟台264001;3.91526部队,广东湛江524064)
文章将Nussbaum增益控制引入分数阶混沌系统,解决了分数阶混沌系统在存在控制方向未知情况下的同步控制问题。首先,选取了一类稳定的分数阶积分滑模面。然后,结合整数阶Nussbaum增益控制方法与滑模变结构控制理论,设计了一种Nussbaum增益同步控制器。最后,作为例子,实现了分数阶Chen系统和分数阶Rössler系统在控制系数未知时的混沌同步控制,数值仿真验证了文中方法的正确性和有效性。
分数阶混沌系统;同步;Nussbaum增益控制;控制方向未知
控制方向未知也属于一种不确定性。所谓控制方向,也就是控制增益的符号,在通常的控制设计中,一般是需要预先获知的。但当控制方向不确定时,混沌系统的控制问题将变得非常困难,特别是当控制系数时变或缓变时,如果涉及到增益符号的改变,原本稳定的系统可能会因为控制方向的改变而失去稳定。一般涉及到控制方向未知的情况大多会运用到Nussbaum增益控制方法。自从Nussbaum提出Nussbaum增益控制概念以来,该方法在控制设计中已经得到广泛应用。针对不同的系统和控制目标,设计者会将Nussbaum增益控制与其他不同的控制技术相结合来设计控制器,从而达到控制目的。
在混沌同步中引入Nussbaum增益控制,已有文献进行了相应研究[1-2],但研究对象仍然局限于整数阶混沌系统。由于分数阶非线性系统控制有其特殊性,与整数阶系统相比有较大不同,因而在考虑控制方向不确定时,引入Nussbaum增益控制,进而解决分数阶混沌系统的同步问题仍是一个全新的课题。增益限制也是控制设计要考虑的因素[3]。文献[4]将Nussbaum增益控制方法引入到整数阶混沌系统的同步控制。文献[5]提出一种基于Nussbaum增益的自适应Backstepping控制策略,实现了控制方向未知的严反馈系统的稳定控制。王强德等人[6]应用Nussbaum增益技术和递推方法,结合自适应控制,实现了一类控制方向未知和时变不确定性的本质非线性系统的跟踪控制。刘露等人[7]结合鲁棒镇定技术和Nussbaum增益控制技术控制方向未知的非线性系统的全局鲁棒输出调节问题。A.Boulkrounet等人[8]针对不确定多变量系统存在未知执行器非线性项和未知控制方向问题,采用Nussbaum增益控制技术,设计了模糊自适应控制器。葛树志等人[9]研究了一类控制方向未知的严反馈非线性离散时间系统的自适应控制问题,运用离散Nussbaum增益克服了控制方向变化引起的控制困难。但以上应用Nussbaum增益控制的相关文献均没有考虑分数阶混沌系统的同步控制问题。另一方面,虽然考虑分数阶混沌系统的同步控制问题的相关文献比较多[10-14],但这些文献都没有应用Nussbaum增益控制方法解决控制方向未知情况下分数阶混沌系统的的同步控制问题。
本文进一步将Nussbaum增益控制方法引入分数阶混沌系统的同步控制,解决了控制方向未知情况下分数阶混沌系统的同步控制问题。为不使问题过于复杂,本文重点考虑控制方向未知问题,暂不考虑增益受限问题和其他不确定因素的影响。
1 基础知识
定义1:[15]如果函数N(χ)满足
那么函数N(χ)称为Nussbaum-type函数。
引理1:[15]若是光滑的Nussbaum-type函数,q≥1是奇数,则Nq(χ)也是光滑的Nussbaum-type函数。
引理2:[15]设V(t)和χ(t)是定义在区间上的光滑函数,对于,V(t)≥0,N(χ)是适当且光滑的Nussbaum-type函数,如果下列不等式成立:

式(2)中:c0是适当的常数;c1>0;g(t)是取值于未知闭区间的时变参数,则V(t)、χ(t)和必定在区间上有界。
2 问题描述和模型建立
考虑如下分数阶混沌系统

式(3)为最一般的系统表达式,分数阶混沌系统均可用此式表示。将系统式(3)作为驱动系统,构建带控制输入的响应系统如下:

式(4)中:u为控制量;b为未知的控制系数(方向、大小均未知)。
本文的目的是在控制方向未知情况下,实现驱动系统和响应系统同步,换句话说就是当控制方向发生变化时,同步仍能实现,即,使得当t→∞时,有
定义驱动系统与响应系统的误差为e=y-x,则分数阶误差系统可表示为

其第i(i=1,2,…,n)维分量可表示为

假设1:控制系数bi未知且有界,并在未知闭区间内取值,且0∉Ii。
3 Nussbaum增益控制器设计
选取如下的滑模面:

式中,ci为正常数。
对式(7)两边沿时间求导得

不难证明此滑模面是稳定的。
对误差系统(6),可设计如下虚拟控制量

式中,k0为正常数。

对于式(10),根据Lyapunov稳定性理论,si是渐近稳定的。
接下来,设计Nussbaum增益控制律为

将式(10)改写为如下形式

设计Nussbaum增益更新律为

构造如下Lyapunov函数

对式(14)两边关于时间求导得:
对式(15)两边积分得:

下面分析ki(t)的有界性。先假设ki(t)无界,且ki(t)→+∞。对式(16)两边除以ki(t),可得:

由Nussbaum函数的定义1及其性质式(1),可以推得:

此时,存在ki(t),使得当ki(t)→+∞时有:

而当ki(t)→+∞时,由式(17)的左边,又有:

由式(17)~(19),结果显然是矛盾的,即ki(t)→+∞的假设不成立。同理可以证明ki(t)→-∞的假设也不成立。因此,ki(t)是有界的。由式(7)、(14)和式(16)及混沌系统的特性容易得到V(t)有界,si有界,有界,再由Lyapunov函数的构造形式及其正定性,易得si→0。
4 数值仿真与分析
下面验证本文Nussbaum增益控制方法的有效性。
以分数阶Chen混沌系统作为驱动系统:
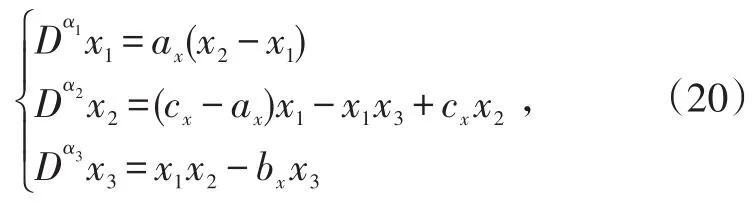
当ax=35,bx=3,cx=28时,整数阶(αi=1)Chen系统表现出混沌状态,仿真表明,当αi=0.95时,分数阶Chen系统仍能表现出混沌行为[16],当αi=0.9时,系统仍是混沌的。
构建带控制输入的分数阶Rössler系统作为响应系统:
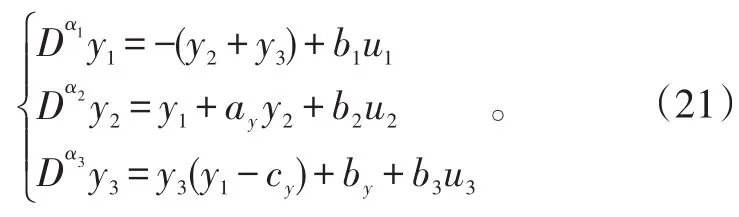
当ay=0.2,by=0.2,cy=5时,整数阶Rssler系统表现出混沌状态;当ay=0.4,by=0.2,cy=10,αi=0.9时,分数阶Rössler系统仍可得混沌吸引子[17]。
未知控制系数bi设置如下:

选取Nussbaum增益的初始值为ki(0)=(1,1,1);驱动系统和响应系统的初始值分别为(x1(0),x2(0),x3(0))=(1,2,-1)和(y1(0),y2(0),y3(0))=(2,-1,1);系统分数阶次αi=0.9。
根据前面所设计的控制律式(11),得到的仿真结果如图1所示。从仿真曲线可以看出,在控制方向切换时超调较大,这是Nussbaum增益控制进行方向搜索造成的。考虑Nussbaum增益控制的特性,其受初始状态影响较大,当初始误差较小时,稳定性会较好,但是,当误差较大时,增益自适应调节律容易进入高增益区,使仿真结果发散。

图1 仿真曲线Fig.1 Simulation curves
5 结论
本文将Nussbaum增益控制引入分数阶混沌系统,解决了分数阶混沌系统在存在控制方向未知情况下的同步控制问题。首先,选取了一类稳定的分数阶积分滑模曲面;然后,结合周爱军等人设计的整数阶Nussbaum增益控制方法,实现了分数阶Chen系统和分数阶Rössler系统在控制系数未知情况下的混沌同步,仿真结果验证了该方法的正确性和有效性。在同时考虑控制方向未知、增益受限和其他不确定因素影响的情况下,如何设计分数阶混沌系统的同步控制是我们今后要进一步研究的课题。
[1]LEI J,WANG X,LEI Y.A Nussbaum gain adaptive synchronization of a new hyperchaotic system with input uncertainties and unknown parameters[J].Communications in Nonlinear Science and Numerical Simulation,2009,14(8):3439-3448.
[2]ZHOU A,REN G,SHAO C,et al.Synchronization of chaotic systems by using limited nussbaum gain method[J].Research Journal of Applied Sciences Engineering and Technology,2012,4(20):4007-4011.
[3]刘涛,张皓,陈启军.通信受限网络控制系统的H∞控制[J].控制与决策,2013,28(4):537-541. LIU TAO,ZHANG HAO,CHEN QIJUN.H∞control for networked control systems with communication constraints[J].Control and Decision,2013,28(4):537-541.(in Chinese)
[4]周爱军.不确定混沌系统的控制与同步方法研究[D].大连:大连海事大学,2012. ZHOU AIJUN.Research on control and synchronization methods for uncertain chaotic systems[D].Dalian:Dalian Maritime University,2012.(in Chinese)
[5]DING Z.Adaptive control of non-linear systems with unknown virtual control coefficients[J].International Journal of Adaptive Control and Signal Processing,2000,14(5):505-517.
[6]王强德,井元伟,张嗣瀛.控制方向未知的非线性系统的自适应输出跟踪控制[J].控制与决策,2006,21(3):248-252. WANG QIANGDE,JING YUANWEI,ZHANG SIYING. Adaptive output tracking control of nonlinear systems with unknown control directions[J].Control and Decision,2006,21(3):248-252.(in Chinese)
[7]LIU L,HUANG J.Global robust output regulation of lower triangular systems with unknown control direction[J]. Automatica,2008,44(5):1278-1284.
[8]BOULKROUNE A,M'SAAD M,CHEKIREB H.Design of a fuzzy adaptive controller for MIMO nonlinear time-delay systems with unknown actuator nonlinearities and unknown control direction[J].Information Sciences,2010,180(24):5041-5059.
[9]SAM GE S,YANG C,HENG LEE T.Adaptive robust control of a class of nonlinear strict-feedback discretetime systems with unknown control directions[J].Systems&Control Letters,2008,57(11):888-895.
[10]周平,邝菲.分数阶混沌系统与整数阶混沌系统之间的同步[J].物理学报,2010,59(10):6851-6858. ZHOU PING,KUANG FEI Synchronization between fractional-order chaotic system and chaotic system of integer orders[J].Acta Physica Sinica,2010,59(10):6851-6858.(in Chinese)
[11]ZHOU P,DING R,CAO Y X.Multi drive-one response synchronization for fractional-order chaotic systems[J]. Nonlinear Dynamics,2012,70(2):1263-1271.
[12]马铁东,江伟波,浮洁,等.一类分数阶混沌系统的自适应同步[J].物理学报,2012,61(16):160506. MA TIEDONG,JIANG WEIBO,FU JIE,et al.Adaptive synchronization of a class of fractional-order chaotic system[J].Acta Physica Sinica,2012,61(16):160506.(in Chinese)
[13]李东,邓良明,杜永霞,等.分数阶超混沌Chen系统和分数阶超混沌Rössler系统的异结构同步[J].物理学报,2012,61(5):50502. LI DONG,DENG LIANGMING,DU YONGXIA,et al. Synchronization for fractional order hyperchaotic Chen system and fractional order hyperchaotic Rössler system with different structure[J].Acta Physica Sinica,2012,61(5):50502.(in Chinese)
[14]黄丽莲,齐雪.基于自适应滑模控制的不同维分数阶混沌系统的同步[J].物理学报,2013,62(8):80507. HUANG LILIAN,QI XUE.The synchronization of fractional order chaotic systems with different orders based on adaptive sliding mode control[J].Acta Physica Sinica,2013,62(8):80507.(in Chinese)
[15]RYAN E.A universal adaptive stabilizer for a class of nonlinear systems[J].Systems&Control Letters,1991,16(3):209-218.
[16]YAN J,LI C.On chaos synchronization of fractional differential equations[J].Chaos,Solitons&Fractals,2007,32(2):725-735.
[17]LI C,CHEN G.Chaos and hyperchaos in the fractionalorder Rössler equations[J].Physica A:Statistical Mechanics and itsApplications,2004,341:55-61.
Nussbaum Gain Synchronization for Fractional-Order Chaotic Systems with Unknown Control Direction
WU Mei1,CHENG Jihong2a,YU Mingzhe3,ZHANG Youan2b
(1.Fire Monitoring Room,Yuhuangding Hospital,Yantai shandong 264001,China;2.Naval Aeronautical and Astronautical University a.Department of Scientific Research;b.Department of Control Engineering,Yantai shandong 264001,China;3.The 91526thUnit of PLA,Zhanjiang Guangdong 524064,China)
The Nussbaum gain control method was introduced to solve the synchronization control problem for fractionalorder chaotic systems with unknown control direction.Firstly,a fractional-order sliding motion was selected.Then,a Nussbaum gain controller was designed by combining the Nussbaum gain control method for integer-order systems and sliding mode variable structure control theory.Finally,an example was given,which realized the synchronization control between fractional-order Chen systems and fractional-order Rössler systems with unknown control direction.Simulation results demonstrated the correctness and effectiveness of the presented method.
fractional-order chaotic systems;synchronization;Nussbaum gain control;unknown control direction
TN850.3
A
1673-1522(2016)03-0348-05DOI:10.7682/j.issn.1673-1522.2016.03.009
2016-03-18;
2016-04-20
国家自然科学基金资助项目(61273058)
吴梅(1962-),女,高工,大学。
