串联杆机构运动学分析与建模研究
2016-10-20宋孟军冯勇鑫
宋孟军,冯勇鑫
(天津职业技术师范大学汽车与交通学院,天津300222)
串联杆机构运动学分析与建模研究
宋孟军,冯勇鑫
(天津职业技术师范大学汽车与交通学院,天津300222)
采用实验方法,对D-H法则与普通坐标变换方法在机构运动学模型构建中的作用进行验证,对位置、姿态及计算过程的匹配度和计算时间等进行分析比较,并对2种方法在运动坐标系变换过程中的应用特点进行实例验证。实验结果表明:D-H方法关于串联杆机构运动学模型的建立存在一定局限性,而普通坐标变换方法能够对串联机构的设计与计算提供优于D-H法则的方法支撑。
串联机构;D-H法则;坐标变换;运动学
对机器人运动学模型进行构建过程中,运动学方程的求解具有重要作用,尤其对串联机构,较为通用的构建方法是依据D-H法则进行整体机构运动学模型构建,即应用规定的坐标系变换法则进行相应的坐标系构建[1-4]。这种变换方法规则固定,形式统一,应用简便。但对于复杂机构,如多自由度串联机械臂及并联机床等运动学模型的构建,这种方法在某种程度上影响了坐标系构建的效率与方法应用的多样性,给结构多样的串联机器人分析工作带来较多的分析步骤,不仅影响串联机器人设计的效率,而且给模型构建的分析工作带来一定困难。为了对D-H法则及普通坐标变换方法的构建效率进行准确有效的评估,为串联机构运动学方程的求解提供可行高效的计算方法,本文针对D-H法则与普通坐标变换方法的计算效率与计算质量进行研究,采用理论分析与实验方法,对串联机器人运动学坐标系快速构建方法进行量化分析与评估,为串联机器人坐标系的快速构建提供新的解决方案。
1 运动坐标系的构建方法
1.1D-H法则构建运动学模型
分别采用D-H法则[5-6]与普通坐标变换方法,对一台多感官机器人头部的串联机构进行运动学模型构建。依据D-H法则建立的坐标系如图1所示,得到的参数如表1所示。采用普通坐标变换方法所得的参数如表2所示。其中,表2最后一列为沿y轴进行部分运动学坐标系之间的坐标变换情况。
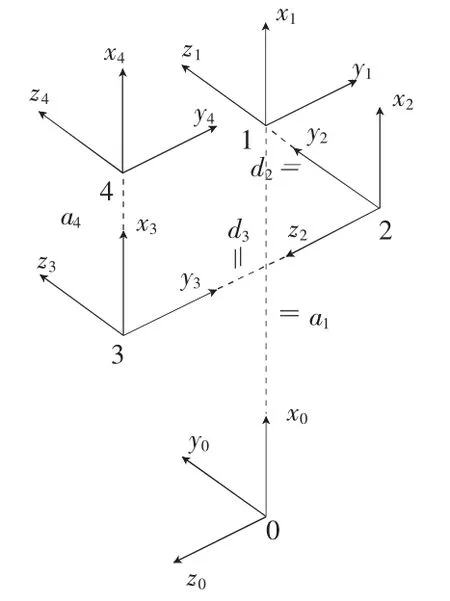
图1 多感官头部机构与坐标系建立
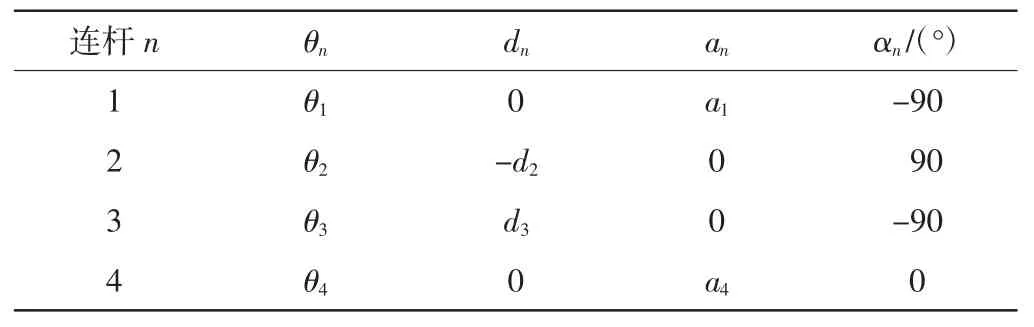
表1 多感官头部机构坐标变换的D-H参数
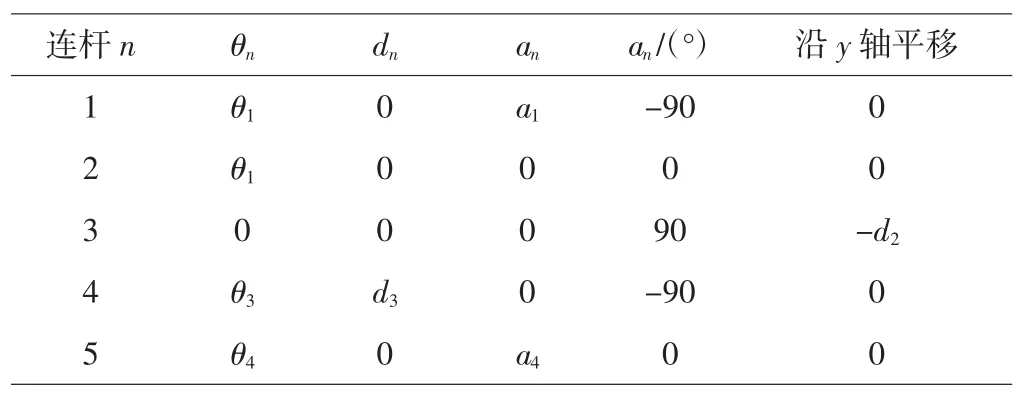
表2 多感官头部机构普通坐标变换的参数
表1和表2中所示参数为坐标变换过程中参数的列举,所得运动学正解结果一致,表明D-H法则与普通坐标变换方法均可进行串联机构运动学模型的构建与求解,因此本文以这2种方法为研究对象,对串联机构运动坐标系构建方法的效率进行研究。头部运动学模型运动学方程为:

式中:kAi为两关节间的齐次变换方程,采用D-H方法建立坐标系。
1.2普通坐标变换方法的应用
基于上述方法,可对三自由度机械手运动学坐标系进行构建,如图2所示。为求得机械手末端相对于起始关节的坐标变换关系,可以采用D-H法则,其表达式为:

若获得机械手末端点的位姿状态,利用D-H法则需经过6步变换,但使用D-H法则前需先经过标准的4步坐标系变换,才能确定2个坐标系之间的准确变化过程,且该方法较难被初学者理解与应用,给机构设计带来了局限性。因此,采用普通坐标变换方法,重新构建图2所示串联机械臂的运动学模型。与D-H法则不同,普通坐标变换方法将Y1、Y2轴作为主动轴,进行电机转角输入,如图3所示。同时,进行运动学模型的构建,得到第3坐标系与第1坐标系之间的转换关系为:

由式(3)可知,与D-H法则相比,采用普通坐标变换方法后,变换步骤减少1步,提高了计算与分析效率。计算表明,式(3)与式(2)具有相同的位置姿态解,可省略D-H法则中的步骤。为得到与图3所示相同的姿态,第3关节处需通过以下公式进行坐标转换,转换公式为:
分析可知,利用普通坐标变换方法可节省变换步骤,同时保证计算结果的正确性,在实际应用中具有一定适用性。
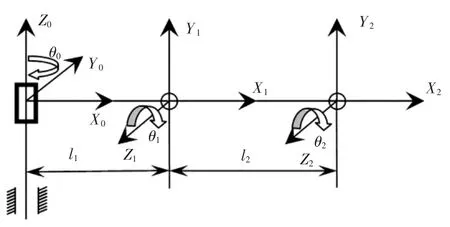
图2 三自由度机械手运动学坐标系构建

图3 普通坐标变换下的运动学坐标系建立
为进一步验证普通坐标变换方法的正确性,本文对复杂仿生机构的运动学模型进行构建。猎豹后肢简化图[7-8]如图4所示。依据后肢股骨、胫骨、跗骨以及掌骨的分布形式建立仿生机构的运动学模型。
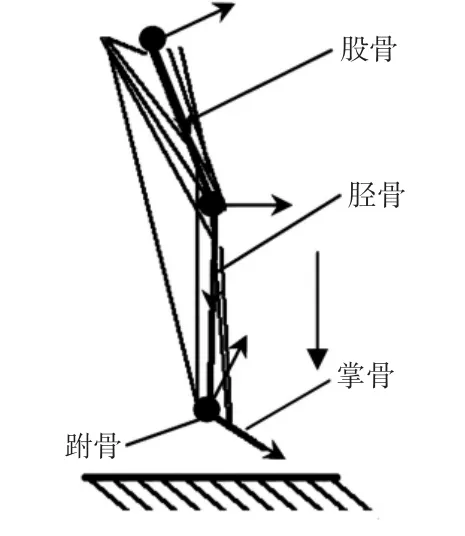
图4 猎豹后肢仿生机构的运动学模型
由图4可知,运动学模型采用普通坐标变换方法构建,并没有遵循D-H法则所规定的步骤。该方法通过式(3)沿Y轴设定运动主轴,以便快速建立仿生机构整体运动学模型。
图4中肌肉长度、肌肉附着点位置及骨骼长度等数据依据猎豹实际尺寸参数建立[9-10],并进行相应简化,以便应用普通坐标变换进行运动学模型构建。在进行参数简化过程中,肌肉群简化为肌肉力线,股骨、胫骨简化为关节连线,跗骨简化为踝关节。同时,以猎豹躯体中心为几何重心,作为猎豹骨肌系统运动学模型整体仿生机构的坐标原点,构建猎豹整体机构模型如图5所示。
由图5可知,应用普通坐标变换方法能够得到准确的猎豹骨肌系统运动学模型,并可得到各关节在猎豹运动过程中关节角位移的变化情况,猎豹各关节的运动规律如图6所示。图6中,Sc为肩胛骨关节转角;Sh为肱骨处关节转角;El为肘关节处关节转角;Wr为腕关节处关节转角;Hi为臀关节处关节转角;Kn为膝关节处关节转角;Ta为踝关节处关节转角。各关节转角均与猎豹实际奔跑过程的关节变化情况相对应,因此进一步证明了普通坐标变换方法的有效性。

图5 猎豹骨肌系统的运动学模型(单位:mm)

图6 猎豹各关节的运动规律
猎豹躯体后肢骨肌系统内股骨相对于基础坐标系的变换公式为:
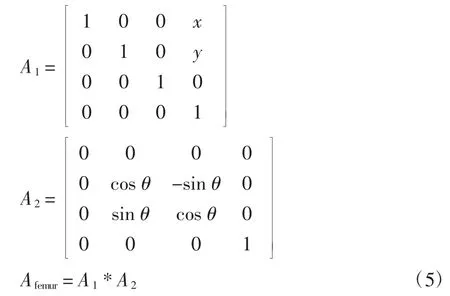
由式(5)可知,在猎豹骨肌系统构建过程,对比D-H法则,普通坐标变换方法简化了变换过程。
2 实验测验与分析
本次实验基于图2所示三自由机械手机构的坐标系统,分别利用D-H法则与普通坐标变换方法对串联机构的坐标系统进行建立。
本次实验共有55人参加,被试均具有一定的空间机构学基础。将被试分为2组,第1组30人,第2组25人。令第1组使用D-H法则,第2组使用普通坐标变换法则。2组的位置与姿态计算准确率分析如图7所示。

图7 位置与姿态计算准确率分析
其中前3列为第1组测试结果,后3列代表第2组测试结果。第1组中,第1列柱形图代表位置计算正确的人数,第2列柱形图代表姿态计算正确的人数,第3列柱形图代表参加测试的人数,第2组柱形图的排列顺序相同。由图7可知,第1组中位置计算正确的为2人、姿态计算正确的为8人、参加测试人数为30人;第2组中位置计算正确为8人、姿态计算正确人数为0、参与测试人数为25人。由此可知,使用D-H法则能够准确计算机械手的位置姿态,且由于姿态计算正确人数较第2组测试人员多,说明在运动模型构建过程中,对D-H法则的使用能够准确把握坐标变换的分析过程;而第2组测试人员的位置计算准确人数约为第1组的4倍,说明使用普通坐标变换方法能够准确从坐标变换过程的起始点入手,从简单的变换过程理解串联机构的运动学模型构建过程。但由于姿态计算准确度为0,说明初学者在使用普通坐标变换过程进行多自由度串联机构的坐标变换过程中,缺乏对变换过程的准确理解与把握,从而降低了计算结果的准确性。
2组人员在计算过程中的用时对比如图8所示。由图8可知,第2组测试人员平均所用时间(824 s)比第1组(702 s)稍高,表明普通坐标变换方法所用坐标变换过程的效率相对较低,而D-H方法的效率相对较高且过程较为集中。因此,说明D-H法则具有一定的应用基础;普通坐标变换方法虽然效率较低,但能为串联机构运动学坐标系的建立提供较为丰富的构建路径。
2组参与人员计算过程匹配度的分析对比如图9所示。由标定结果可知,与使用D-H法则的测试人员(A)相比,使用普通坐标变换方法的测试人员(B)能够准确理解并使用运动学坐标系的变化方法,其标定匹配度明显高于使用D-H法则测试人员,且所有使用普通坐标变换方法的测试人员关于运动学模型的构建理解较为一致。

图8 计算过程用时对比

图9 计算过程匹配度比对
3 结束语
本文针对机器人运动学分析过程中坐标系的高效快速构建问题,采用实验方法对D-H法则与普通坐标变换方法进行了研究,并通过实际求解猎豹骨肌系统的运动学模型对普通坐标变换方法在串联机构运动学模型构建过程中的作用进行了验证。实验结果表明:相比于普通坐标变换方法,初学者在使用D-H法则进行运动学坐标系构建过程中,具有较高的求解效率和较为准确的计算结果,但整体运动学模型构建过程中,D-H法则的应用具有一定的局限性,而普通坐标变换方法更具一定的适用性。同时,普通坐标变换方法可节省D-H法则中繁琐固定的变换步骤,进而提高计算与分析的效率,丰富机构模型构建的多样性。
[1]方海燕,刘小勇.机器人运动学模型中的参数选取[J].机械设计,2011(2):46-49.
[2]宋孟军,张明路.变形移动机器人腿部运动学正逆解求解及仿真[J].机械科学与技术,2011(12):2152-2156.
[3]张铁,谢存禧.机器人学[M].广州:华南理工大学出版社,2001.
[4]熊有伦,丁汉,刘恩沧.机器人学[M].北京:机械工业出版社,1993.
[5]TAVASOLI A,EGHTESAD M,JAFARIAN H.Two-time scale control and observer design for trajectory tracking of two cooperating robot manipulators moving a flexible beam[J]. Robotics and Autonomous Systems,2009,57(2):212-221.
[6]HENTEN E J V,SCHENK E J,WILLIGENBURG L G V,et al.Collision-free inverse kinematics of the redundant sevenlink manipulator used in a cucumber picking robot[J]. Bio-systems Engineering,2010,106(2):112-124.
[7]WANG X,LI M T,WANG P F,et al.Bio-inspired controller for a robot cheetah with a neural mechanism controlling leg muscles[J].Journal of Bionic Engineering,2012,9:282-293.
[8]TANG G,ZHANG X A,ZHANG L L,et al.A technical method using musculoskeletal model to analyse dynamic properties of muscles during human movement[J].Computer Methods in Biomechanics and Biomedical Engineering,2011,14(7):615-620.
[9]HUDSON P E,CORR S A,PAYNE-DAVIS R C,et al. Functionalanatomyofthecheetah(acinonyxjubatus)hindlimb[J].Journal and Anatomy,2011,218(4):363-374.
[10]HUDSON P E,CORR S A,PAYNE-DAVIS R C,et al. Functional anatomy of the cheetah(acinonyxjubatus)forelimb[J].Journal and Anatomy,2011,218(4):375-385.
Research on construction method of kinematics coordinate system for serial mechansims
SONG Meng-jun,FENG Yong-xin
(School of Automotive and Transportation,Tianjin University of Technology and Education,Tianjin 300222,China)
The experimental method is used to test the effect of D-H rule and the common coordinate transformation method in constructing the kinematics model of the serial mechanisms,and the solution of position,posture,calculation process and time consuming are used for analyzing and comparative study,simultaneously,the applicable characteristic of the both methods when transforming between different coordinate systems is given in this paper.The study results show that some limitations exist in solving kinematic equations for D-H rule method,while the common coordinate transformation method could provide more efficient process for calculating and designing the serial mechanism.
serial mechanism;D-H rule;coordinate transformation;kinematics
TH112
A
2095-0926(2016)02-0010-05
2016-03-29
天津市应用基础与前沿技术研究计划项目(14JCYBJC22000);天津职业技术师范大学科研发展基金项目(KJY1304).
宋孟军(1983—),男,讲师,博士,研究方向为机器人运动学.
