城市重载电动汽车适配功率电机可行性研究
2016-10-19关玉明王锡瑞刘晨晨
关玉明 王锡瑞 燕 唐 刘 琴 刘晨晨
河北工业大学,天津,300130
城市重载电动汽车适配功率电机可行性研究
关玉明王锡瑞燕唐刘琴刘晨晨
河北工业大学,天津,300130
为满足城市重载电动汽车独特的行驶特点以及其驱动电机的要求,提出了一种新型永磁电机结构——适配功率电机(PAM)。PAM电机不仅继承了永磁直流电机高启动扭矩、结构简单可靠、易控制的特点,同时也可以满足城市重载电动汽车行驶速度低、启动刹车频繁、载重量大的行驶特点。以一台6/8kW的PAM样机为例,分析其外特性曲线与城市重载电动汽车驱动电机的匹配情况,从整个转速区间全面分析PAM电机的运行特点。最终通过分析研究与实验验证,PAM电机作为城市重载电动汽车的驱动电机具有一定优势。
重载电动汽车; 驱动电机; 外特性曲线; 适配
0 引言
目前,包括城市电动公交车、城市物流车、环卫卡车等多种车辆在内的城市重载电动汽车均属于低速电动汽车。这类车辆长时间行驶在市内道路,车速普遍不超过40 km/h,极速一般不超过80 km/h且维持时间较短;并且,因目前大部分市内道路拥堵、交通信号灯设置合理性较差等原因,这类车辆需要频繁启动与停止;此外,这类车辆与普通乘用车最大的不同就是其载重量较大(车体重量可大可小),其载重量往往是自身重量的0.8倍到1.6倍。因此,行驶速度低、启动刹车频繁以及载重量大是这类车辆的常见特点。综上所述,此类城市重载电动汽车的行驶特点对其驱动电机提出了不同于普通乘用车的动力性能要求。然而,现有驱动电机技术来源于工业电机,工业电机单一额定参数的特点可以使其在额定转速附近有较高的效率,但是当工业电机运行在高于或低于额定转速的速度区间内时,其效率很难得到保证,尤其是频繁启停,更是对现有驱动电机的极大考验,且电能的浪费主要是在频繁启停中。
目前,城市重载电动汽车的专用驱动电机较少,通常以永磁同步电机和异步交流电机代用。永磁同步电机作为电动汽车的驱动电机有着诸多优点,如能量密度高、调速性能优良等[1]。随着变频技术的不断完善,调速性能差的异步交流电机因其容量大、可靠性高、寿命长等优点也开始在城市重载电动汽车上使用。在考虑成本和技术难度的前提下,驱动电机的容量是有限的。为了达到高启动扭矩、频繁启停以及高载重量的目标,应增大驱动电机的低速扭矩并且电机的额定转速不能过高,同时还必须保证相应电动汽车拥有高效率高速行驶的能力,显然,这两者是相矛盾的。以目前的实际应用而言,现有电机面对城市重载电动汽车独特的动力需求都有不足。目前,为了满足上述要求,城市电动公交车多数采用“电机+减速器+变速箱”的组合[2-5]。选用减速器与变速箱势必会增加整车成本,同时也在一定程度上削弱了“电机直驱”带来的强动力表现和高效率表现。
针对城市重载电动汽车对驱动电机提出的要求,本文提出一种新型永磁电机结构——适配功率电机(power adaptive motor,PAM),详见专利《一种用于电动汽车的适配功率电机》(专利号:(ZL 2015 2 0010459.X)),所谓PAM电机是指用于电动汽车的可根据速度负载变换额定功率和机械特性的永磁电机。适配功率电机兼有永磁电机高功率密度、启动扭矩大的特点,在直驱的情况下,可以在控制器的作用下同时表现出低速外特性“硬”和高速外特性“软”的特点,在较小的合理容量下,PAM可以在保证城市重载电动汽车高效率的运行在0~40 km/h的速度区间同时保证其可以达到设计最高速度。与现有驱动电机相比,PAM更适用于城市重载电动汽车的行驶特点。
1 电机结构与工作原理
1.1电机结构
图1为利用SolidWorks软件建立的6/8 kW的PAM样机的三维模型。盘式换线转接器具有至少两组转接接口;盘式换线接触器具有至少两组接触片;线圈绕组具有至少两组线圈。各组线圈绕组的引出线分别引出并接入盘式换线转接器的转接接口中,盘式转接换线器各组引线分别接到盘式换线接触器的接触片上并通过电极触头与电源接通。

1.主轴 2.机壳 3.永磁极 4.线圈绕组5.盘式换线转接器 6.盘式换线接触器 7.电极触头图1 PAM样机SolidWorks模型
如图2所示,盘式换线转接器将整个电机内部分为两个独立的密闭腔室,其中线圈绕组所在的腔室是免维护的;而盘式换向接触器所在腔室是可以通过打开窥视盖对里面的易损件进行维护与更换的,此过程中不需要将电机整体拆散,因此可以极大缩短维护时间。

图2 PAM样机盘式转接换向器结构示意图

图3 PAM样机绕组结构示意图
与其他电机的绕组不同,适配功率电机的每支绕组均有三个接线端,包括一个共用的接线端a和两个独立的接线端b和c,一组绕组的典型结构示意图见图3。
共用的接线端a分别连接到盘式换向转接器对应的转接插孔里,接线端b连接到盘式换线转接器内圈的转接插孔里,同时接线端c连接到盘式换线转接器外圈的转接插孔里。
1.2工作原理
由于本电机的原型结构为永磁直流电机,因此其工作原理与普通工作原理类似:转子的电枢通电后产生磁场,与定子上的永磁铁磁极相互作用并推动转子旋转[6]。其不同点在于适配功率电机的结构允许其两组换向装置可以单独工作,由于各组换向装置所连接的电枢线圈匝数不同,从而导致驱动电机表现出的外特性不同。由永磁直流电机的电磁模型得到下列数学关系式。
感应电动势表达式:
(1)
电磁转矩表达式:
(2)
电压平衡方程:
U=Ea+IaRa
(3)
式中,N为电枢线圈匝数;n为电机转速;φ为磁通;p为电机极对数;a为并联支路数;Ia为电机电流;Ra为电机电阻。
综合式(1)~式(3),整理得到永磁直流电机外特性表达式:
(4)
通过分析式(4)得,直流电机的的理想空载转速为
(5)其中,参数a、p、φ、N均为常数,理想空载转速和电机电压成正比,即在额定转速以下的调压调速。
令n为零,得到电压U下的启动转矩:
(6)
其中,参数p、Ra、N、φ均为常数,启动转矩和启动电压成正比。对于永磁直流电机,参数a、p、φ均无法改变,但是根据上一节对适配功率电机结构的分析可知,适配功率电机的电枢线圈匝数N是可以改变的。分析式(5)与式(6),在其他条件不变的前提下减少电枢线圈匝数N可以提高电机的最高转速;虽然此时依然减小了转矩输出,但只要此时负载转矩仍小于电机输出转矩,那么在输出功率和输入电压不变的情况下电机可以达到更高的转速。也就是说:当适配功率电机的转速达到一定值后,可以通过控制系统改变通电的绕组线圈匝数,从而使电机可以以较低的电压达到较高的转速。这里将改变通电绕组线圈匝数时电机的转速点称为超速点。转速在超速点以下,电机的输出表现为输出扭矩大,动力强劲;转速在超速点以上,电机的动力性能相对降低,在满足车辆最高行驶速度的条件下,仍具备一定的动力性能。这种特性恰好可以满足城市重载电动汽车的行驶特点:多数情况下行驶在拥堵路况,载重量大;最高速度需满足城市快速路或外环线等道路的最低速度要求。
2 动力性能分析
为了在理论上进一步证明PAM电机作为城市重载电动汽车驱动电机的应用价值,本节利用MATLAB对PAM电机的机械特性进行计算并得出相应的特性曲线,分析该曲线对城市重载电动汽车在城市路况下行驶特点的适应性,从而证明PAM电机在电动汽车领域的推广应用价值。
作为汽车的原动机,驱动电机输出扭矩和转速。驱动电机车辆的动力性能强弱是由驱动电机的扭矩转速关系决定的,这种驱动电机扭矩与转速之间的关系就是指电机的外特性[7]。永磁直流电机的外特性曲线可以用式(4)来表达,而对于PAM电机而言,现有的控制策略是以转速为节点来控制电机内部结构的变换的。因此,PAM电机的外特性曲线应该是以转速为变量的分段函数,表达式如下:
(7)
式中,n0为超速点转速。
为验证PAM电机的性能特点,本节依照某城市小型电动环卫车的相应参数设计一台6/8 kW的实验用PAM样机。此实验用PAM样机可通过后驱的形式对该小型电动环卫车提供动力。对该实验用PAM样机的特性进行理论分析并通过实验得出实际的机械特性曲线,来验证在城市重载电动汽车上PAM电机比传统驱动电机拥有更好的性能特点。该城市小型电动环卫车参数如表1所示。
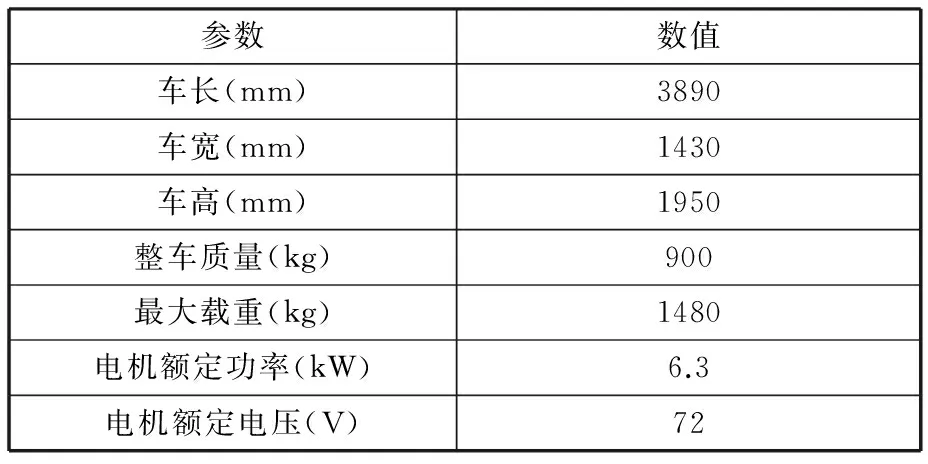
表1 某小型电动环卫车部分参数表
由表1可知,该环卫车最大载重约为车辆自重的1.64倍,属于重载电动汽车。
以超速点转速n0=1500 r/min、功率P=6/8 kW、减匝前N=32且减匝后N=16的PAM样机为例,结合式(1)与式(2),部分参数如表2所示。
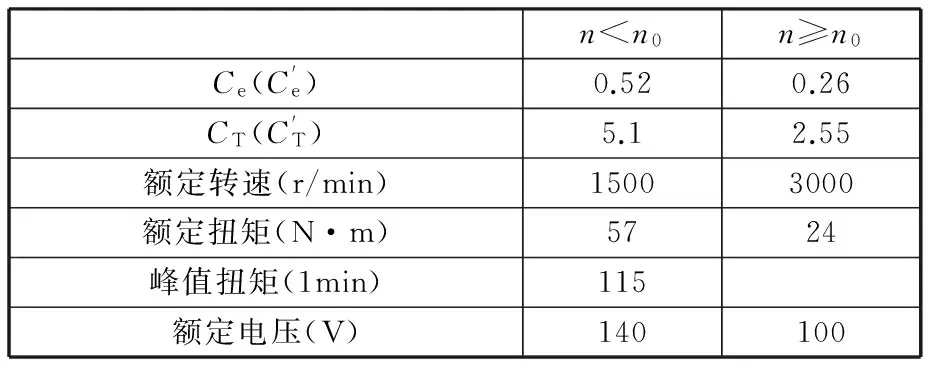
表2 PAM样机部分参数表
根据上述样机参数,运用MATLAB对PAM电机的数学模型进行计算并绘制其转速-转矩图,其结果如图4所示。

图4 PAM样机与某普通直流电机机械特性对比图
图4中包含PAM样机与某城市小型电动环卫车普通直流电机两种电机的机械特性曲线,两条曲线分别与两条坐标轴所围成的区域是对应两种电机的工作区间。分析PAM样机与某普通直流电机的机械特性曲线可以得出以下结论:
(1)当电机转速低于超速点(图4中两条虚线的交点,亦为n=1500 r/min处)转速时,PAM电机的外特性曲线呈现“硬”特性;当电机转速高于超速点转速时,PAM电机的外特性曲线呈现“软”特性。
(2)通过对比两种电机的外特性曲线可以发现,当转速较低时,两种电机均能输出较大转矩,均能满足低速、重载的性能要求;但当电动汽车需要较高运行速度时,普通直流电机在满足具有一定转矩的条件下无法达到较高转速,而如需达到较高转速则必定增加电机功率,从而增加相应的而成本。故当电动汽车需要较高运行速度时,PAM电机具有一定的优势。
在电机容量有限的前提下,PAM在低速时外特性曲线相对平滑,这有利于外特性曲线向扭矩增大的方向延伸,增大了恒扭矩区的极限输出扭矩,这一特性有利于城市重载电动汽车以较低的功率完成低速下的启停与加速;同时,PAM电机在高速时外特性曲线相对陡峭,这有利于外特性曲线向转速增大的方向延伸,增大了恒功率区的极限转速,可提高城市重载电动汽车的最高速度。两种特性相结合可扩大相应车辆的应用场合,故PAM电机作为城市重载电动汽车电机具有较大的推广价值。
3 样机实验验证
3.1实验系统简介
为了进一步验证上述数学模型的正确性并校验PAM电机外特性的正确性,需进行实验以验证PAM电机的性能并通过分析PAM电机的机械特性验证其在重载电动汽车领域的可行性。实验用PAM电机如图5所示。

图5 实验用PAM电机
电动汽车电机驱动系统的性能测试方法众多,通过查阅文献[8-11],从整车驱动特性、匹配标定、阻力施加等各种因素上考虑,该实验平台由10kW直流电源、控制器、PAM样机、测功机和配套计算机组成,该模型可以较好地模拟真实电动汽车的运行状况。其组成示意图见图6。
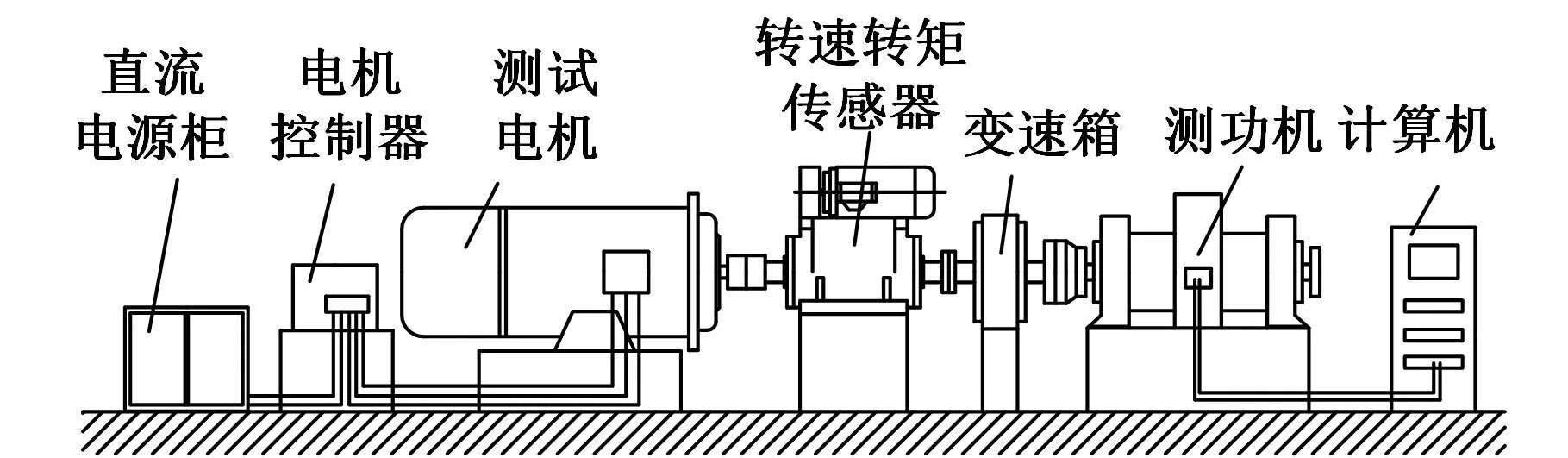
图6 实验平台组成示意图
PAM样机控制器采用32位定点DSP芯片TMS320F2812。控制器主程序如图7所示,主程序主要包括系统初始化、电机转速信号测量、油门踏板位置检测、油门踏板踩踏速度测量等功能。

图7 控制器主程序图
3.2实验验证
根据设计电压设置控制器,并通过油门踏板控制电机转速,最终通过电源、油门、控制器、PAM电机、测功机与计算机等相关设备进行实验分析,通过测试相关转速下的扭矩来绘制样机的实际机械特性曲线。在实验过程中需对电机施加阻力。汽车的行驶阻力可用常微分方程来确定:
(8)
式中,δ为汽车旋转质量换算系数;m为汽车质量;v为汽车速度;k0、k1、k2分别是行驶阻力模型中的常数项、一次项和二次项系数,它们与汽车迎风面积、风速、车轮滚动摩擦因数等一系列因素有关。
上述公式对于阻力的计算较为复杂,通过查阅相关文献,小型汽车在不同车速下的阻力可粗略概括,如表3所示[12]。

表3 不同车速下的阻力值
汽车在行驶过程中受到的阻力由驱动电机的输出转矩与之相平衡。对测功机增加一个相应的电流值,测功机内部会产生一个抑制测功机旋转的磁场,即相当于施加了一个负荷。将相关转速下的阻力换算成转矩后,施加阻力后的PAM样机实际机械特性曲线如图8所示。为了便于理解PAM电机转矩与功率之间的关系,在图8中增加电机功率坐标轴(Y轴),即在PAM电机机械特性曲线的基础上增加功率与转矩之间的关系。

图8 PAM样机实测外特性曲线
图8是在PAM样机机械特性曲线的基础上增加了转矩与功率的关系曲线。通过对比数学模型的外特性曲线与实验结果发现:
(1)实验结果的PAM电机外特性曲线与数学模型的外特性曲线变化趋势基本吻合,说明实验样机可以满足重载电动汽车的动力需求;然而在同一转速下实验测得的PAM样机的转矩小于数学模型中的电机转矩,可能是因为电阻的温度效应或实验条件较差等原因造成的,这里不再详述。
(2)根据实验计算得出整个转速区间上的功率,功率曲线由两条类似于二次曲线的线型连接而成。当PAM样机启动时,输入电压为140V,线圈匝数32,此时PAM样机表现为低转速高转矩,相应的功率曲线为一条二次曲线;当PAM样机转速达到超速点(图8中对应a点或b点)时,通过控制器对电枢绕组进行减匝,线圈匝数减少为16,同时为避免绕组中电流过大,减匝瞬间输入电压降为100V。由于此时电机驱动的电动汽车行驶速度已较高,只要电机驱动转矩不低于负载转矩就可满足电动汽车的行驶要求,故降低电压是可行的。此时PAM样机的功率曲线为另一条二次曲线;两条二次曲线的交点对应机械特性曲线上的a点,此处为超速点,转速1500 r/min,相同转速下的功率见c点或d点。PAM电机的输出功率在两段二次曲线上分别达到最大值;PAM电机超速点处的扭矩可以满足车辆正常行驶要求,同时PAM电机在此处的输出功率较低,从而保证车辆的高效运行。
4 结语
通过以上分析,PAM电机作为城市重载电动汽车驱动电机有着独特的优势,相比现有工业电机,PAM电机更加适应重载电动汽车启动扭矩大、极速不高的特点,同时兼备低速“硬”特性和高速“软”特性的优点,能以较低的容量在低速时输出较高扭矩,同时又能以较低的电压达到高转速。综上所述,PAM电机作为重载电动汽车驱动电机具有较大的优势,可作为重载电动汽车驱动电机的发展趋势与研究方向。
[1]彭海涛,何志伟,余海阔. 电动汽车用永磁同步电机的发展分析[J]. 微电机,2010,43(6):78-81.
Peng Haitao, He Zhiwei, Yu Haikuo. Development Analysis on Permanent Magnet Synchronous Motor in Electric Vehicle[J].Micromotors,2010,43(6):78-81.
[2]张志森,凌玲,吴百海,等. 电动公交汽车机械自动变速(AMT)过程控制[J]. 广东工业大学学报,2013,30(4):74-78.
Zhang Zhisen, Ling Ling, Wu Baihai, et al. Shift Process Control of Automated Manual Transmission (AMT) in Electric Buses[J].Journal of Guangdong University of Technology,2013,30(4):74-78.
[3]席军强,王雷,付文清,等. 纯电动客车自动机械变速器换挡过程控制[J]. 北京理工大学学报,2010,30(1):42-45.
Xi Junqiang, Wang Lei,Fu Wenqing, et al. Shifting Control Technology on Automatic Mechanical Transmission of Pure Electric Buses[J].Transactions of Beijing Institute of Technology,2010,30(1):42-45.
[4]Xi Junqiang,Xiong Guangming, Zhang Yan. Aplication of Automatic Manual Transmission Technology in Pure Electric Bus[C]//Proceedings of 2008 IEEE Vehicle Power and Propulsion Conference(VPPC).Harbin:IEEE,2008:1-4.
[5]Xi Junqiang, Wang Lei,Fu Wenqing, et al. Shifting Control Technology on Automatic Mechanical Transmission of Pure Electric Buses[J].Transactions of Beijing Institut of Technology,2010,30(1):42-45.
[6]肖江成. 超高速永磁无刷直流电机的设计与分析[D].广州:广东工业大学,2011.
[7]许瑞.纯电动邮政车动力系统设计及性能仿真研究[D].武汉:武汉理工大学,2013.
[8]李茂森. 交流测功机在电机性能测试中的应用[J]. 电机与控制应用,2005,32(8):62-64.
Li Maosen.AC Dynamometer Applied in ElectricM achine Performance Test[J].Electric Machines & Control Application,2005,32(8):62-64.
[9]Sung C O. Evaluation of Motor Characteristics for Hybrid Electric Vehicles Using the Hardware-in-the-loop Concept[J].IEEE Transactions on Vehicular Technology,2005,54(3):817-824.
[10]Schupbach R M,Balda J C.A Versatile Laboratory Test Bench for Developing Powertrains of Electric Vehicles[C]//IEEE 56th Vehicular Technology Conference. Vancouver, BC, 2002:1666-1670.
[11]卢子广,柴建云,王祥珩,等. 电力驱动系统实时控制虚拟实验平台[J]. 中国电机工程学报,2003,23(4):123-127.
Lu Ziguang, Chai Jianyun, Wang Xiangheng, et al.Virtual Test Platform for Real-time Conrtol of Electrical Drives[J].Rroceedings of the CSEE,2003,23(4):123-127.
[12]李晓甫,赵克刚,黄向东,等.汽车行驶阻力模型参数的确定[J].汽车工程.2011,33(8):645-648.
Li Xiaofu, Zhao Kegang, Huang Xiangdong, et al.Determination of Parameters in Vehicle Driving Resistance Model[J].Automotive Engineering.2011,33(8):645-648.
(编辑袁兴玲)
Research on Power Adaptive Motor Used for City Overloading Electric Vehicles
Guan YumingWang XiruiYan TangLiu QinLiu Chenchen
Hebei University of Technology, Tianjin, 300130
To meet the requirements of the drive motor, which possessed the city overload electric vehicle of unique characteristics of driving, a new structure of power adaptive motor(PAM) was proposed. PAM inherited the characteristics of the permanent magnet DC motor, which possessed high starting torque, simple and reliable structure, easy control, and so on, and might satisfy the characteristics of the city overload electric vehicles, such as low speed, starting and breaking frequently, and large loading capacity. This paper took a 6/8kW prototype as an example and analysed the matching of the external characteristic curve and the city overload electric vehicles. Then the operating characteristics of the PAM were analysed from the entire rotate speed range. Finally, through the analyses and experimental validation, PAM as the city overload electric vehicle motor has certain advantages.
overload electric vehicle;drive motor;external characteristic curve;adaptive
2015-12-02
U464.9
10.3969/j.issn.1004-132X.2016.19.022
关玉明,男,1957年生。河北工业大学机械工程学院教授、博士研究生导师。主要研究方向为机电一体化成套设备及关键部件。发明专利5项,实用新型专利6项,发表论文30余篇。王锡瑞,男,1992年生。河北工业大学机械工程学院硕士研究生。燕唐,男,1990年生。河北工业大学机械工程学院硕士研究生。刘琴,女,1992年生。河北工业大学机械工程学院硕士研究生。刘晨晨,男,1989年生。河北工业大学机械工程学院硕士研究生。