基于加权信息熵的航天器姿态稳定自动监测
2016-10-19韩威华
张 宽,韩威华
(北京航天飞行控制中心,北京100094)
基于加权信息熵的航天器姿态稳定自动监测
张 宽,韩威华
(北京航天飞行控制中心,北京100094)
为监视航天器的姿态控制稳定度以为后续飞行控制决策提供依据,提出了一种基于加权信息熵的航天器姿态稳定监测方法,该方法使用加权信息熵计算航天器姿态局部时域内的非线性变化复杂度,进而量化评估航天器的姿态稳定性,可对航天器的姿态稳定进行自动辅助监视和判断。探月三期再入返回飞行试验任务期间的17次调姿数据验证了方法的有效性,并且发现了某次调姿后俯仰角和偏航角均未收敛和稳定,此现象在任务期间并未被测控人员监视发现,进一步证明亟需开展航天器姿态稳定自动辅助监视和判断的必要性。
姿态稳定;加权信息熵;自动监视与判断
1 引言
保证航天器长期高精度、高可靠性和高稳定性运行,必须保证足够的姿态控制稳定度。姿态控制稳定度不够,会产生推力器抖动、姿态控制性能降低和太阳帆板结构损坏等诸多问题[1]。监视航天器的姿态控制稳定度,为后续飞行控制决策提供依据,对于顺利开展并完成航天飞控任务具有重要意义[2]。
目前,在我国航天测控过程中监视航天器姿态稳定度主要采用人工监视的方法[3],该方法需要监视者掌握遥测参数的物理意义和航天器的功能、结构和总体情况等知识,一般是飞行控制专家或航天器研制人员,知识素质要求高。随着我国航天事业的迅猛发展,多任务成并行态势、未来空间站需长期运营,从航天任务和值守周期两个角度都需要大量的专业监视人员,仅仅依靠增加监视人员已经远远无法满足任务的需求。因此,在人工监视的同时,亟需研究并发展航天器自动辅助监视和判断技术。
航天器自动辅助监视和判断目前多采用遥测参数阈值比判的方法[2-6],即针对表征航天器健康状态或工作性能的遥测参数给出异常超限阈值,遥测参数值如果超出阈值则报警异常。超限阈值的确定通常采用领域专家和数据挖掘两种方法。影响航天器在轨姿态稳定的因素很多,如航天器挠性结构、姿态控制系统控制能力、空间环境等[1],且各种因素并发复杂地作用于航天器。因此,航天器的姿态变化(特别是在调姿期间)具有非线性动力学的特征。然而,现有的阈值比判方法并没有考虑遥测参数在时间维度上的复杂非线性变化特征。熵测度是度量非线性复杂度的一种有效方法[7-8],可以通过计算局部时域内的非线性复杂度对航天器的姿态稳定性进行跟踪评估。
本文基于加权信息熵提出了一种航天器姿态稳定监测方法。该方法通过实时监测航天器姿态欧拉角(滚动角、俯仰角和偏航角)并计算欧拉角偏差,进而基于球心距离对数据进行编码,最后计算偏差的加权信息熵[7]并对姿态稳定进行判断。我们通过探月三期再入返回飞行试验任务期间17次调姿数据验证了加权熵的有效性。该方法可以为后续飞控任务的姿态控制稳定性的无人自动监视和判断提供技术参考。
2 基于加权信息熵监测航天器姿态稳定
2.1 方法框架
为量化评估航天器的姿态稳定性,首先需要定义航天器偏离稳定状态的度量,然后基于专家知识或历史数据评估出偏离是否在正常范围。此外,计算加权信息熵首先需要对数据进行编码[7]。因此,基于加权信息熵监测航天器姿态稳定需要4个步骤(如图1所示):
1)计算欧拉角偏差
使用偏差角Δ来表征航天器抖动的幅度,Δ的定义如式(1):

2)对偏差数据进行编码
在计算加权信息熵之前需要对角度进行量化和编码。
3)计算加权信息熵
加权信息熵不仅可以像传统的标准差用于评估欧拉角抖动的幅度范围大小,还可以评估欧拉角偏差的模式变化,如非随机的趋势性偏离等[7-8]。
4)对结果进行评估
基于航天器标称或非标称正常状态下的数据计算出的熵值可以建立知识库(Knowledge Base,KB),在计算出某时刻加权信息熵后可以根据KB的知识来评估当前姿态稳定是否异常。
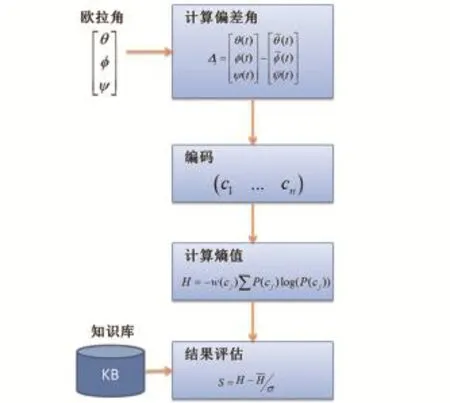
图1 方法步骤Fig.1 The steps of the approach
2.2 计算欧拉角偏差
式(1)定义的偏差角Δ包括滚动角偏差Δφ、俯仰角偏差Δθ和偏航角偏差ΔΨ三项。如果航天器无姿态抖动或者抖动很小,则偏差角Δ为O或者在O附近很小的范围内变化(如图2所示)
时刻ti的局部角度测量均值依式(2)计算:

其中2twindow+1为窗口宽度,表示局部角度测量真值为窗口宽度内所有角度的均值。twindow如果取值太小,局部的随机因素对均值的计算影响较大;如果取值太大,局部的有用信息将被全局信息湮没。twindow的取值一般依据经验或实验效果确定,比如,在处理探月三期再入返回飞行试验任务期间的姿态数据时,twindow根据实验效果分析取10较为合适,即既可以表现出局部间的变化差异信息,也可以有效过滤掉局部的随机影响因素。

图2 偏差角示例Fig.2 Example of deviation angles
2.3 对偏差数据进行编码
计算加权信息熵之前需要对偏差数据进行量化(离散化)与编码,以某次轨控过程为例,角度偏差体轴系内的变化轨迹如图3所示。

图3 角度偏差在roll-pitch-yaw坐标系内的变化轨迹Fig.3 The trace of the angle deviation in the rollpitch-yaw Cartesian coordinate system
某次轨控过程中包含了四个过程:1)轨控前调姿;2)调姿后稳定;3)轨控;4)轨控后转太阳定向,分别用红色、绿色、蓝色和黄色轨迹表示。将图3中的中心局部放大,可以发现在轨控前调姿阶段偏差数据轨迹范围很大(红色部分),在调姿后稳定阶段偏差数据轨迹稳定在坐标原点处(绿色部分),在轨控阶段偏差数据轨迹变得范围较大(蓝色),最后在转太阳定向过程中偏差数据变化范围再次变得很大(黄色)。
偏差角轨迹与中心原点的距离变化范围可以表征偏差数据的变化范围,在此,采用式(3)所示欧拉距离来计算偏差角轨迹与原点间的距离:

基于d(Δ)可以对轨迹进行量化并且编码,过程如图4和式(4)所示:
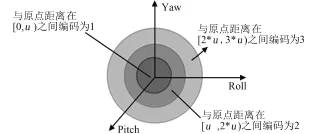
图4 基于轨迹与中心原点距离的编码Fig.4 Code based on the distance between the trace and the original point

其中c表示编码结果,Upper表示向上取整函数,u为量化步长。u的取值如果太小,编码的分辨率过高,极端情况会导致所有的样本均被分配一个编码,熵值计算失去意义;u的取值如果太大,编码的分辨率过低,极端情况下会导致所有的样本均被分配同一个编码,熵值计算同样失去意义。u的取值一般依据经验或实验效果确定,比如,在处理探月三期再入返回飞行试验任务期间姿态数据时,u取值为0.05较为合适,即轨控调姿前和调姿稳定后计算得到的熵值尽量小,调姿过程中计算得到的熵值尽量较大。
2.4 计算加权信息熵
信息熵的定义由Shanon提出[8],如式(5):

其中,H表示信息熵,P(cj)表示编码cj出现的概率。
通过2.3节对偏差数据进行编码后得到编码结果(c1,…,cn),其中ci的取值由公式(4)确定,则P(cj)的取值如式(6):

其中count(cj)表示cj在编码结果中出现的次数。
Shannon信息熵认为所有编码的效用是平均的,即轨迹远离原点和轨迹靠近原点的效用是一致的。实际上,在监测航天器稳定性的时候,轨迹离原点距离越远越应该引起注意,因此采用加权信息熵[7]来刻画偏差角轨迹的运动规律,其定义如式(7)所示:

其中w(cj)表示编码cj的权值,w(cj)可以采用式(8)确定:

其中abs(cj)表示cj的绝对值。
2.5 对结果进行评估
基于航天器标称或非标称正常状态下的姿态数据计算出的熵值可以建立知识库(Knowledge Base,KB),即KB中存储了标称或正常状态下的加权熵。在计算出某时刻加权信息熵后可以根据KB的知识来判断当前姿态稳定是否异常[2]。
航天器在不同的飞行阶段时其加权信息熵的分布一般是不同的。比如,在巡航阶段没有外部因素干扰时航天器是稳定的,其加权熵值应该固定为0,但在某些阶段(如轨控)其加权熵一般不会为0。一般KB应该有多个,分别面向不同的测控过程[2]。
假设KB中的加权信息熵满足正态分布,我们可以采用式(9)来判断某时刻加权信息熵与KB的显著性差异[9]:

得到S值后,显著性可以通过S计算,例如abs(S)≥2.6可以认为在高斯分布的前提下以99%的可信度认为与KB相比具有显著差异。
如果KB中的加权信息熵取值较为有序和单一,比如均为0,则可以采用简单的阈值来进行判断,如式(10)所示:

其中vKB表示KB中的单一值,ds为一定的弹性阈值幅度,当S为true时表示S与KB具有显著性差异,反之则无差异。比如,当vKB取0时,如果定义ds为0.01,H在(-0.01,0.01)范围内都认为与KB相比无显著性差异。
3 实例验证
3.1 数据准备
探月工程三期再入返回试验飞行器由服务舱和返回器双目标组成,采用了半弹道跳跃式方式再入返回并着陆[10]。实验数据提取了再入返回任务期间的17次调姿数据,为了与调姿前数据和调姿后数据进行对比,提取数据的起始点为调姿开始前5 min,结束点为调姿结束后10 min。因此,实验数据包含了三个阶段:1)调姿前阶段;2)调姿过程阶段;3)调姿后阶段。
3.2 实验设计
实验数据包含了调姿前、调姿过程和调姿后三个阶段的数据,对这三类数据分别计算其加权熵,实验的结果可以从两个维度进行比较和分析:
1)比较三个过程的数据的加权熵差异;
2)比较相同阶段历次调姿数据的加权熵差异。
方法中共涉及到两个参数,用于计算欧拉角偏差的窗口宽度(2twindow+1)和用于进行编码的量化步长(u),经过实验分析,窗口宽度(twindow)取10、量化步长(u)取0.05较为合适。
3.3 结果与分析
实验结果如表1所示:

表1 实验结果Table 1 Experiment results/(比特/符号)
表1中的数值为加权熵,实验结果表明:
1)三个阶段的加权熵值相比较,调姿过程的熵值均大于0,而调姿前和调姿后相对较小且均在0附近。熵值较大说明编码码值较多,偏差角与中心原点的距离变化范围较大,航天器姿态变化较大;而熵值趋于0或等于0,说明编码码值较为集中,偏差角与中心原点的距离变化范围较小,航天器姿态稳定。在调姿过程中,航天器进行姿态机动,姿态有较大变化;在调姿前,航天器处于稳定状态,姿态变化较小;在调姿后,姿态控制系统对航天器进行稳定控制,因此姿态变化也较小。
2)相同阶段历次调姿数据相比较,调姿前熵值较为稳定,均为0;调姿过程中熵值均大于0,且变化幅度较大;调姿后熵值大多在0附近,有3处大于0,其中序号为4的调姿加权熵最大,且远大于其他熵值。历次调姿前航天器处于稳定状态,因此熵值均为0;在调姿过程中,每次姿态变化过程均有差异,因此熵值有较大差异且均大于0;在调姿后,因姿态控制系统对航天器进行稳定控制,航天器处于稳定状态,因此熵值也多为0。
实验结果显示序号为4的调姿进行后,加权熵的计算结果远远大于其他16次的结果,进一步研究发现该次调姿后俯仰角和偏航角均未收敛和稳定,如图5所示:

图5 序号为4和序号为8的两次调姿收敛比较Fig.5 Comparison of attitude convergence between No.4 and No.8
图5的上面三张图分别表示序号为4的调姿结束后的偏航角、俯仰角和滚动角的变化情况,下面三张图分别表示序号为8的调姿结束后的偏航角、俯仰角和滚动角的变化情况。图5显示:4号调姿结束后偏航角和俯仰角两个方向并未收敛,且其变化幅度较大,其中偏航角为0.1°,俯仰角为0.2°,该问题如果发生在服务舱与返回器分离阶段有可能造成重大事故。此类异常信息采用人工监视欧拉角的方法是极不容易被发现的。
另外,表1显示的试验结果中10号调姿在调姿过程中的加权熵值远远大于其它调姿的加权熵,经过进一步分析发现是因为此时的工程遥测下传周期为8 s,而其他遥测周期为2 s,下传周期变长致使偏差角变大,最终导致加权熵增加。因此,基于加权熵进行姿态稳定分析时要考虑工程遥测下传周期带来的影响。
试验结果表明在调姿前和调姿后两个阶段加权熵的取值较为集中和单一(均为0),这两个阶段的知识库KB1可以基于式(9)建立,此时vKB取值为0,由于在9号调姿中调姿后的加权熵为0.0684,ds可以取0.1,即式(10)可以修改为式(11):

在调姿过程中因为10号调姿过程中遥测下传周期导致其加权熵较大,在建立知识库时将该次数据除去,基于式(9)建立知识库KB2,即式(9)可以修改为式(12):

4 结论
本文提出了一种基于加权信息熵的航天器姿态稳定监测方法,该方法面向姿态遥测数据,通过实时监视姿态欧拉角的变化,可以对姿态稳定进行自动监视和判断。利用探月三期再入返回飞行试验任务期间的17次调姿数据对该方法进行的测试和分析验证了加权熵的有效性,并且发现某次调姿后俯仰角和偏航角均未收敛和稳定的现象。姿态不稳定容易诱发引起推力器抖动,甚至拉偏轨道,达不到轨控的精度要求,造成重大事故,而此现象在任务期间并未被测控人员监测发现,进一步证明亟需开展航天器姿态稳定自动辅助监视和判断的必要性。目前该方法仅通过欧拉角的偏差对在轨航天器的姿态稳定性进行评估,下一步工作将研究多信息融合的姿态检测方法,如进一步考虑姿态角速度等信息,以为后续飞控任务姿态稳定的无人自动监视和判断提供技术参考。
(References)
[1]Lim T W.Thruster attitude control system design and performance for tactical satellite 4 maneuvers[J].Journal of Guidance,Control,and Dynamics,2014,37(2):403-412.
[2]Iverson D L,Spirkovska L,Schwabacher M.General purpose data-driven online system health monitoring with applications to space operations[R].ARC-E-DAA-TN1628,2012.
[3]张渊.载人飞船飞行控制技术[M].北京:国防工业出版社,2008:54-57.Zhang Yuan.Manned Spacecraft Flight Control Technology[M].Beijing:National Defense Industry Press,2008:54-57.(in Chinese)
[4]龚学兵,王日新,徐敏强.基于数据关联性分析的飞轮异常检测[J].航空学报,2015,36(3):898-906.Gong Xuebing,Wang Rixin,Xu Minqiang.Abnormality detection for flywheels based on data association analysis[J].Acta Aeronautica et Astronautica Sinica,2015,36(3):898-906.(in Chinese)
[5]Mattews B L,Srivastava A N,Iverson D,et al.Space shuttle main propulsion system anomaly detection:a case study[J].Aerospace and Elecronic Systems Magazine,IEEE,2011,26(9):4-13.
[6]Iverson D L.Inductive system health monitoring[C]//Proceedings of the 2004 International Conference on Artificial Intelligence.Las Vegas,VA:CSREA,2004:605-611
[7]姜丹.信息论与编码[M].合肥:中国科学技术大学出版社,2004:31-40.Jiang Dan.Information Theory and Coding[M].Hefei:University of Science&Technology China press,2004:31-40.(in Chinese)
[8]Shannon C E.A mathematical theory of communication[J].ACM SIGMOBILE Mobile Computing and Communications Review,2001,5(1):3-55.
[9]陈希孺.概率论与数理统计[M].合肥:中国科学技术大学出版社,2009:49-51.Chen Xiru.Probability and Statistics[M].Hefei:University of Science&Technology China press,2009:49-51.(in Chinese).
[10]杨孟飞,张高,张伍,等.探月三期月地高速再入返回飞行器技术设计与实现[J].中国科学:技术科学,2015,45(2):111-123.Yang Mengfei,Zhang Gao,Zhang Wu,et al.Technique design and realization of the circumlunar return and reentry spacecraft of 3rd phase of Chinese lunar exploration program[J].Sci Sin Tech,2015,45(2):111-123.(in Chinese)
Automatic Monitoring of Spacecraft Attitude Stability Based on Weighted Information Entropy
ZHANG Kuan,HAN Weihua
(Beijing Aerospace Control Centre,Beijing 100094,China)
To monitor the attitude stability of the spacecraft and provide useful evidence for the flight control decision-making,a weighted entropy based approach for monitoring the spacecraft attitude stability was proposed.The entropy was used as the measure of the local time-domain complexity in the approach.The data of 17 attitude controls from the reentry flight mission for the 3rd phase of Chinese lunar exploration program were employed to test our approach.The experiment results proved the validity of the approach,the phenomenon that the pitch and yaw did not converge and still changed after the attitude adjustments was found,which was not monitored during the mission and further proved the importance and urgency of automatic monitoring and judgement for the spacecraft attitude stability.
attitude stability;weighted information entropy;automatic monitoring and judgement
TP319
A
1674-5825(2016)05-0608-05
2015-07-06;
2016-08-10
国家自然科学基金(11403001)
张宽(1984-),男,硕士,工程师,研究方向为航天测控数据挖掘。E-mail:zhangkua@mail.ustc.edu.cn