基于可伸缩机构的空间机械臂系统设计
2016-10-19梁常春林云成王耀兵
王 康,梁常春,林云成,王耀兵
(北京空间飞行器总体设计部 空间智能机器人系统技术与应用北京市重点实验室,北京100092)
·空间机械臂专题·
基于可伸缩机构的空间机械臂系统设计
王 康,梁常春,林云成,王耀兵
(北京空间飞行器总体设计部 空间智能机器人系统技术与应用北京市重点实验室,北京100092)
空间机械臂在发射阶段往往要求较小的包络,在空间应用阶段又需要足够大的操作范围和很高的操作精度,单一构型的空间机械臂很难满足以上需求。为此提出一种臂杆可伸缩的自重构空间机械臂:当机械臂处于收缩状态时,发射包络小、操作精度高;当机械臂处于伸长状态时,可达范围大。仿真验证结果表明:设计的等截面可伸缩臂杆提高了机械臂的适应能力。
在轨服务技术;空间机械臂;自重构;可伸缩臂杆
1 引言
随着航天事业的迅速发展和对太空探索的不断深入,需要空间机器人参与的空间任务会越来越多,如空间站的建造维护、空间设备的维修、科学实验载荷的照料、行星表面探测等。由于太空环境的限制,这些任务不能全靠航天员来完成,而空间机器人具有适应微重力、高温差、高辐射的太空作业环境的能力[1],因此采用空间机器人协助或代替航天员完成一些太空作业,在高效性和安全性方面都具有很重要的意义。
在过去十几年中,对空间机器人的研究多数限于使用旋转关节和固定长度连杆来模仿人类的手臂运动,根据不同的任务需求,设计不同长度的机械臂[2]。一旦机械臂设计研制完成,它所具有的工作空间与能力也已定型。“设计定型即任务定型”的瓶颈使得空间机械臂的在轨任务无法得到有效拓展,从而制约了其应用。此外,针对不同应用任务而重复研制空间机械臂无疑也增加了研发成本、时间成本与发射成本,不利于愈发激烈的航天市场竞争。目前国际空间站机械臂的臂杆也为固定长度,由加拿大MDA公司研制,该公司也正在研制新一代的可伸缩臂杆机械臂,该方案机械臂在发射之前存放在不超过5 m3的空间里,在轨展开后长度可达15 m,共6个自由度[3]。
本文提出一种新型的基于伸缩机构的空间机械臂方案,不但使用旋转关节,也采用了可伸缩的臂杆。
2 需求分析
为同时具备大中型设备操作与小型精细化操作的双重能力,进行基于伸缩机构的空间机械臂系统设计,主要从以下应用背景需求出发:
1)远距离目标大范围捕获与转移、近距离对象高刚度精细操作
空间机械臂是航天器在轨服务的重要工具,臂杆可伸缩自重构机械臂应同时满足在轨服务对可达范围大和操作精度高的要求。如图1所示,伸长构型的机械臂应可对远距离的服务对象(如小卫星、望远镜、货物等航天器)进行捕获,捕获完成后机械臂臂杆收缩变为精度较高的收缩机械臂构型,以实现精细化操作(如在轨维修维护)。

图1 自重构机械臂在轨服务Fig.1 On-orbit service of self-reconfigurable manipulator
2)半封闭式货舱货物搬运
随着在轨服务技术的发展,对入口较小且内部空间较大的半封闭式航天器在轨服务操作的现象可能会增多,如图2所示,具有臂杆可伸缩自由度的自重构空间机械臂应可进入狭小入口,同时伸展构型的机械臂可在航天器内部空间进行大范围操作。

图2 狭小入口半封闭式航天器在轨服务Fig.2 On-orbit service on semi-close cabin with narrow portal
3)航天员出舱活动的快速转移
在辅助航天员出舱活动方面应具有更灵活的应用。例如,在较大的范围内,航天员可以仅依靠操作伸缩臂杆的长度实现位置的移动,以避免了多旋转关节联动带来的机械臂构型奇异风险,并降低不必要的工作功耗。
4)满足小空间运载包络需求
为节约发射成本,当机械臂随其它航天器发射时,应尽量减小机械臂对运载空间的占用需求,但又不失其固有操作能力。此时,可伸缩的机械臂应可通过在发射阶段处于臂杆最短收缩构型以便于航天器构型布局设计与满足运载包络要求。
根据以上需求并考虑未来空间任务的拓展,主要针对机械臂的伸缩功能提出以下指标:
机械臂可达范围:2.5~10.5 m;
臂杆承载弯矩:3000 Nm;
臂杆承载扭矩:1500 Nm;
臂杆伸缩力:1500 N;
臂杆弯曲刚度:≥2×105Nm/rad;
臂杆扭转刚度:≥1×105Nm/rad。
3 系统方案设计
基于可伸缩机构的空间机械臂本体包括9个自由度,主要由7个关节、2个可伸缩臂杆、2个末端执行器组成。其中,7个关节可实现7个转动自由度(肩3+肘1+腕3),2个臂杆可实现2个直线运动自由度,末端执行器用于整臂基座固定及末端的抓取、操作等。由于对称配置,可实现两端双向互为基座,具备覆盖大范围操作空间的爬行拓展能力。此空间机械臂系统组成方案如图3。

图3 基于可伸缩机构的空间机械臂组成方案Fig.3 Framework of space manipulator based on telescopic mechanism
设计的臂杆可伸缩空间机械臂系统主要包括如下配置:
1)模块化关节
7个转动关节均采用通用、轻质、模块化、一体化设计。关节传感器包括关节力矩传感器、关节位置传感器、电机位置传感器等。
2)可伸缩臂杆
2个臂杆伸缩机构与通常的空间展开机构不同,具有定位准确,弯扭刚度高的特点,同时具有电缆自由收放的功能,保证各关节之间的电缆随着臂杆伸缩的过程实现自由收放。
3)通用接口的末端执行工具
根据不同的任务需求,设计不同的末端执行操作工具,用于在轨服务对象的捕获、抓取、精细化操作等,且机械臂与操作工具间的连接为通用、可快速拆卸接口,可实现多用途、易维修的功能。
4)系统控制单元
机械臂系统采用分布控制方式,包含用于系统控制和运动规划的中央控制器、各个分布式关节控制器、臂杆伸缩机构控制器三部分。
以上四部分除可伸缩臂杆外都较为成熟,本文在第4章将针对可伸缩臂杆进行设计,为满足整臂的可达范围要求,伸缩机构应满足1~4 m的伸缩范围指标。
4 可伸缩臂杆机构方案设计
伸缩杆自重构空间机械臂伸缩杆机构要求可重复伸缩、定位准确、弯扭刚度高、伸缩比高,国内外研究的可重复伸缩的空间展开机构包括薄壁管状伸展机构(德国宇航中心研制的CFRP)[4-5]、铰接杆伸展机构(美国AEC-Able公司研制)[6-7]、伸缩套筒式展开机构(美国Northrob Grumman公司研制)[8],其中只有套筒式展开机构可具备以上前3个特点,但由于该机构是由一组直径依次减小的多个同轴薄壁圆筒相互嵌套而成(原理如图4所示),为达到较高的伸缩比,需提高展开级数,而随着展开级数的增多,套筒直径逐渐减小,刚度降低。为此本文提出一种等截面伸缩的展开机构,可保证机械臂臂杆在伸展过程中截面刚度不变,同时获得较高的机构伸缩比。

图4 套筒式展开机构原理Fig.4 Principle of sleeve deployable mast
4.1 等截面臂杆成型原理
等截面伸展机构与套筒式伸展机构的不同之处在于:套筒式伸展机构是驱动已成型的多个薄壁套筒伸展逐级伸展,而等截面伸展机构是使竖直板带和水平板带在伸展的过程中逐渐成型为臂杆。臂杆成型原理如图5所示,竖直板带是一条边缘附近均匀分布矩形孔的扁平金属带状结构,
其结构形式类似于相机胶卷,竖直板带的厚度远小于其宽度,具有很好的柔韧性,可以卷成环状进行存储,占用空间小。水平板带是一种等厚螺旋叶片状,其特殊之处在于沿着水平板带外缘螺旋线均匀分布齿状结构。水平板带的结构类似于矩形截面的等径圆柱弹簧,自由放置时水平板带的每一圈可以叠放在一起,而受到较小的轴向拉力时能够使水平板带的螺距等于螺旋管柱的螺距。竖直板带按照设计的直径螺旋缠绕,保证竖直板带缠绕时具有一定量的重叠部分,在重叠区域,水平板带外缘的齿与竖直板带上的矩形孔啮合锁紧,并形成结构相对稳定的螺旋管柱。

图5 臂杆成型原理Fig.5 Principle of arm forming
通过对板带啮合过程的描述,可以看出板带正确啮合的条件有两个:
1)啮合处竖直板带的孔距PZ与水平板带的齿距pZ相等,如图6所示,可描述为式(1):


图6 板带正确啮合条件一Fig.6 Condition 1 of the correct band joggle
2)竖直板带缠绕一周后,竖直板带上下排孔错位距离Sc与水平板带上下排齿错位距离sc相等,如图7所示,可描述为式(2):


图7 板带正确啮合条件二Fig.7 Condition 2 of the correct band joggle
4.2 伸缩机构方案
根据臂杆成型原理,采用螺旋式滚轮实现板带的啮合,伸缩机构的组成如图8所示,内定字固定不动,外转子上按照与竖直板带相同的螺距P螺旋布置多个滚轮组,形成螺旋轨道,由电机通过1级齿轮驱动转子转动(如图9所示),逆时针旋转时滚轮组顶升水平板带竖直向上移动,同时水平板带的齿状结构与竖直板带孔啮合,并带动竖直板竖直向上运动,形成螺旋管柱(臂杆)。臂杆收缩状态时,两种板带盘旋存储在存储槽中,占用较小的空间。

图8 伸缩机构组成Fig.8 Composition of the telescopic mechanism

图9 螺旋滚轮组伸展原理Fig.9 Principle of extention of the helical wheel set
转子每旋转一周,臂杆伸展一个螺距,即旋转角度和伸展长度成线性关系。所以,转子与支柱之间布置角度传感器,运转过程中可实时测量二者之间的绝对角度,同时可将旋转圈数记录在上位机的FLASH-ROM存储器中,即使控制器断电后,数据不会丢失。当系统通电后,可读取旋转圈数,再测得转子的相对角度,这样可准确计算出臂杆的任意伸展位置。
电缆用于机械臂关节、末端及其它单机的供电和通信,在臂杆伸缩过程中,电缆应该随臂杆收缩。伸缩机构采用中空走线方式,将电缆布置在柔性螺旋板带上,如图10所示,由电缆压固件分段紧固电缆。柔性螺旋板带一端与支柱端固连,另外一段与移动端连接。在臂杆伸缩的过程中,电缆可随螺旋板带沿轴向收缩。

图10 电缆固定方式Fig.10 Cable fixation
4.3 臂杆伸缩参数变化分析
当水平板带处于存储状态时,相邻两圈紧密的叠放在一起,螺距为p0,而水平板带与竖直板带相互啮合形成臂杆时水平板带的螺距与臂杆的螺距相同为P。在水平板带拉伸过程中,随着螺距的变化,水平板带内径、圈数等尺寸会发生变化,这些尺寸的变化会导致水平板带外缘的齿在轴线方向上不再对齐,且相邻两圈对应的齿中心法线也会错开一定的距离。下面对水平板带拉伸前后几何参数变化进行分析。
如图11所示,加工完成后的水平板带圈数为n,螺距为p0,内径为D1,外径为D2。板带啮合形成臂杆后水平板带的圈数为n′,螺距为P,内径为D1′,外径为D2′。

图11 水平板带拉伸前后尺寸编号Fig.11 Dimension ID of the horizontal band before and after extention
水平板带存储时内圈螺旋线长度为式(3):

水平板带存储时外圈螺旋线长度为式(4):

臂杆伸展后内圈螺旋线长度为式(5):

臂杆伸展后外圈螺旋线长度为式(6):

水平板带拉伸前后宽度不变,均为B,且水平板带内缘螺旋线长度和外缘螺旋线长度也不发生变化,因此可得式(7):
由公式(3)~(7)可以得到式(8):

从公式(8)可以看出,拉伸过程中水平板带内径和圈数均是关于节距的函数,运用Matlab软件对拉伸过程中水平板带内径和圈数进行分析,可得曲线如图12和图13。

图12 水平板带内径变化分析Fig.12 Changes of inner diameter of the horizontal band

图13 水平板带圈数变化分析Fig.13 Changes of number of turns of the horizontal band
从上图可以看出,水平板带拉伸过程中内径不断变小,圈数不断增加,所以水平板带拉伸过程中会发生少量的扭转运动。板带啮合时的啮合线仍然是螺旋线,但是直径和圈数会发生变化,变化量与水平板带内圆的变化量相同。本文设计机构参数D1′=262 mm,P=100 mm,P0=2.2 mm,n′=35,B=17 mm,计算可得D1=265.66 mm,n=34.78,臂杆伸缩机构的范围700~4200 mm。
4.4 臂杆承载性能分析
可伸缩臂杆的水平板带和竖直板带均以壳单元进行模拟,由于水平板带的齿宽由齿顶到齿根逐步变大,可保证啮合间隙较小,分析时忽略啮合间隙,建模时使板带啮合处固连。
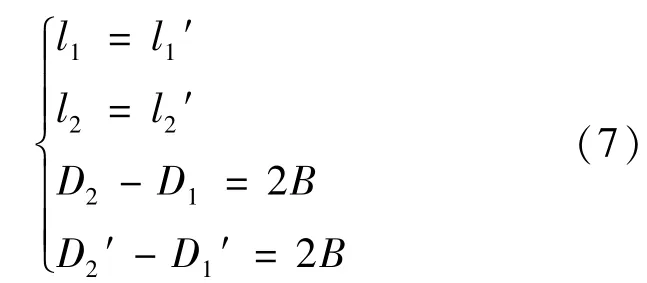
考虑到整个模型都是以相同的螺旋单元进行旋转组成的,因此在进行力学分析时,只针对一小段螺旋单元进行分析,然后再线性折算来评估整体的力学特性。截取500 mm长度的啮合板带作为分析对象,材料为弹簧钢。在模型一端面施加固定约束,另一端面分别施加扭转1500 Nm、弯曲3000 Nm和拉压1500 N。分析模型如图14所示。
图14 臂杆分析模型Fig.14 Analysis model of the rod
对分析数据进行处理,可获得最大应力为217 Mpa,弯曲刚度为2.84×105Nm/rad,扭转刚度为3.2×105Nm/rad,可满足机械臂使用要求。
5 机械臂运动规划仿真验证
上述设计的机械臂本身含有7个旋转副自由度和2个移动副自由度,属超冗余自由度机械臂。一般情况下,机械臂本体可锁定两个移动副自由度,其余七个旋转关节进行带一个冗余自由度的避障路径规划。此时,根据臂杆伸缩的长度变化情况,机械臂用于运动规划的D-H参数会相应变化,系统根据不同的参数实时调整控制器,进行路径的优化计算。这种参数可变的冗余机械臂属于可重构机械臂,具有结构可变性、环境适应性和容错性等特性[9]。
采用主动伸缩方案时,此种可伸缩自重构机械臂不需要经过外界(人为)帮助就可以独立完成重构过程,而视为自重构机械臂。对于自重构机械臂来说,自重构运动规划就是寻找任意两个不同构型A、B之间的变形方法,对机械臂的运动规划控制是通过对其关节角速度向量和杆的伸缩向量的控制来实现的。
建立如图15所示运动模型。

图15 机械臂运动模型Fig.15 Motion model of the manipulator
下面针对典型的应用工况进行运动规划仿真,对设计结果进行验证,如图16所示,运动过程中各关节角度变化曲线如图17所示,臂杆伸缩运动过程长度曲线如图18所示。

图16 典型工况仿真Fig.16 Simulation of a typical work condition
初始时刻机械臂处于收缩状态,由于机械臂所在位置与舱体出入口之间空间狭小,收缩较短的机械臂可完成姿态调整,准备进入舱体。完成构型调整后,由于目标操作物体较远,需要机械臂操作空间扩大,此时机械臂利用伸缩机构将臂杆拉长,实现操作空间的拓展,完成目标物体抓取。在目标物体取出后,需要机械臂在附近对其进行精细操作,此时伸缩机构收缩,完成近距离操作。

图17 关节角度变化曲线Fig.17 Curve of joint angle changes

图18 臂杆长度变化曲线Fig.18 Curve of rod length changes
6 结论
1)提出了一种基于伸缩机构的空间机械臂系统方案,可同时具备发射包络小、捕获转移范围大、近距离精细化操作的特点,与传统的固定杆长的机械臂相比,更好地满足在轨服务的不同需求。
2)设计了一种等截面的臂杆伸缩机构,机构通过水平板带和竖直板带相互啮合锁紧实现臂杆伸缩,具有高刚度、大伸缩比的特点,对伸缩参数变化和刚度进行了分析和仿真,伸缩臂杆外径290 mm,可实现700~4200 mm的伸缩范围,满足机械臂系统需求。
3)针对狭小空间内的目标操作工况,对既定方案的臂杆可伸缩机械臂进行运动规划仿真分析,获取了关节角度转动曲线和臂杆长度伸缩曲线。
(References)
[1]朱仁璋,王鸿芳,泉浩芳,等.载人航天器操作器系统述评[J].载人航天,2009,15(4):11-25.Zhu Renzhang,Wang Hongfang,Quan Haofang,et al.A review of manipulator systems on board manned spacecraft[J].Manned Spaceflight,2009,15(4):11-25.(in Chinese)
[2]于登云,孙京,马兴瑞.空间机械臂技术及发展建议[J].航天器工程,2007,16(4):1-8.Yu Dengyun,Sun Jing,Ma Xingrui.Suggestion on development of chinese space manipulator technology[J].Spacecraft Engineering,2007,16(4):1-8.(in Chinese)
[3]贺棚梓.升级版加拿大机械臂[J].太空探索,2014(2):38-39.He Pengzi.Upgraded Canadarm[J].Space Exploration,2014,(2):38-39.(in Chinese)
[4]张展智,赵国伟,焦景勇,等.空间薄壁式伸展臂的展开仿真与卷曲方式研究[J].宇航学报,2013,34(3):299-307.Zhang Zhanzhi,Zhao Guowei,Jiao Jingyong,et al.Deployment simulation and coiling method study of a space thin-wall deployable boom[J].Journal of Astronautics,2013,34(3):299-307.(in Chinese)
[5]Nakamura K,Tsutsumi Y,Uchimaru K,et al.Large deployable reflector on ETS-VIII[C]//17th Communications Satellite Systems Conference and Exhibit,Yokohama,Japan,Feb 23-27,1998,AIAA Paper:98-1229.
[6]Jones P A,Spence B R.Spacecraft solar array technology trends[C]//Aerospace Conference,1998 IEEE.IEEE,1998,1:141-152.
[7]Douglas M V.Module for an articulated stowable and deployable mast:U.S.Patent 5,267,424[P].1993-12-7.
[8]钟博文.套筒式伸展臂的设计与分析[D].哈尔滨:哈尔滨工业大学,2008.Zhong Bowen.The Design and Analyse of Telescopic Mast[D].Harbin:Harbin Institute of Technology,2008.(in Chinese)
[9]余德忠,唐建祥,徐向纺.混合机构空间机器人运动性能分析及仿真研究[J].机械科学与技术,2012,31(5):847-850.Jin Dezhong,Tang Jianxiang,Xu Xiangfang.Analyzing and simulating kinetic performance of space robot with hybrid mechanism[J].Mechanical Science and Technology,2012,31(5):847-850.(in Chinese)
[10]张金荣,曹长修,王东,等.基于高斯RBF神经网络的可伸缩机械臂系统动态建模与仿真[J].中南民族大学学报(自然科学版),2007,26(3):47-50.Zhang Jinrong,Cao Changxiu,Wang Dong,et al.Dynamic modeling and control of a deployable manipulator system based on gaussian RBF neural-network[J].Journal of South-Central University for Nationalities(Natural Science Edition),2007,26(3):47-50.(in Chinese)
[11]冯庆涛,潘存云,高富东.一种新型旋转伸缩机构的设计与分析[J].机械设计与研究,2010,26(4):54-57.Feng Qingtao,Pan Cunyun,Gao Fudong.The design and analysis of a new rotational and expansive mechanism[J].Machine Design and Research,2010,26(4):54-57.(in Chinese)
[12]刘繄.自重构模块化机器人重构规划方法的研究[D].武汉:武汉理工大学,2009.Liu Yi.Self-reconfigurable Robot Planning Method Research[D].Wuhan:Wuhan University of Technology,2009.(in Chinese)
Design of Reconfigurable Space Manipulator System Based on Telescopic Mechanism
WANG Kang,LIANG Changchun,LIN Yuncheng,WANG Yaobing
(Beijing Key Laboratory of Intelligent Space Robotic Systems Technology and Applications,Beijing Institute of Spacecraft System Engineering,Beijing 100092,China)
Space manipulator is an important tool for on-orbit service of the spacecraft.During the launch phase the smaller envelope is often required,while the bigger range for operation is needed in the stage of space applications.At the same,time on-orbit service also imposes high requirement on accuracy of the manipulator operation,so a single configuration of space manipulator is difficult to meet the above requirements.In this paper a reconfigurable space manipulator model based on telescopic rod was proposed.When the manipulator was in the state of contraction,its launch envelope is small and precision of operation is high.When the manipulator was changed to the extended state,its opration range could be expanded very large.The function of the manipulator such as variable structure could greatly improve the adaptability for on-orbit service.
on-orbit service;space manipulator;reconfiguration;telescopic rod
V423.4
A
1674-5825(2016)05-0537-07
2015-08-17;
2016-08-10
国家自然科学基金(61573058)
王康(1985-),男,硕士,工程师,研究方向为空间机构技术。E-mail:68wangkang@163.com
