一种小型马铃薯捡拾机的研制与试验
2016-10-18闫小丽朱瑞祥黄闪闪
时 永,闫小丽,朱瑞祥,李 江,黄闪闪,刘 源
(西北农林科技大学机械与电子工程学院, 陕西 杨凌 712100)
一种小型马铃薯捡拾机的研制与试验
时永,闫小丽,朱瑞祥,李江,黄闪闪,刘源
(西北农林科技大学机械与电子工程学院, 陕西 杨凌 712100)
目前国内应用较为普遍的马铃薯挖掘机将薯块挖掘条铺后需人工捡拾,工作效率低、劳动强度大。针对以上问题,设计了一种与30 kW拖拉机配套的小型马铃薯捡拾机。该机主要由捡拾装置、薯土分离装置、薯块升运装置、薯块收集装置等几部分组成,制作了样机并进行了田间试验。试验表明:该机薯土分离彻底,机组纯工作小时生产率为0.35~0.38 hm2·h-1,平均伤薯率为4.4%,漏薯率为2.1%,含杂率为6.3%。
马铃薯收获;捡拾机;研制
马铃薯是继水稻、小麦、玉米之后的第四大粮食作物,具有营养丰富、适应性强、产量高、用途广等特点[1-5]。发达国家马铃薯收获早已实现了机械化,且技术先进[6-12]。中国是马铃薯种植面积最大的国家,超过550万hm2,总产量约0.8亿t,居世界首位[13-17],但占生产总用工40%~45%的马铃薯收获作业仍主要靠人畜力完成[18-19],机械化程度很低。
目前,我国马铃薯收获机械大致分为两种[20-23]:一是联合收获,一次性完成挖掘、分离输送、收集等工作,可大大降低劳动强度,收获效率很高,这是马铃薯机械化收获的未来发展趋势。但就目前而言,我国马铃薯种植区以中小地块为主,而现有的几种联合收获机多为大型机械,尺寸大,在中小地块调头困难,只适用于大面积地块作业[24];机具重量大,易压实土壤;价格较高,用户购机成本高。因此,联合收获机短时间内难以在我国大面积推广应用。二是分段收获,即机器挖掘加人工捡拾,这是我国现阶段采用的主要收获方式[19,25-27]。目前,马铃薯挖掘机有多种类型,应用普遍,但功能大同小异,只能将薯块挖掘后条铺于地表,在一定程度上提高了生产效率,减轻了劳动强度,但后续的捡拾工作完全依靠人工进行,生产效率仍较低,劳动强度很大,这种半机械化的方式不能完全满足马铃薯机械化收获的需求[28-33];加之劳动力季节性短缺、成本增加等问题日益突出[34],迫切需要设计一种能够代替人工捡拾的马铃薯捡拾机械。为此,本研究开发了一种体积小、重量轻、价格低,尤其适应中小地块的小型马铃薯捡拾机,该机可大大提高收获效率,节省劳动力,降低收获成本,具有一定实用性和先进性,能满足我国马铃薯机械化收获的需要。
1 整机结构及主要技术参数
1.1整机结构及工作原理
设计的小型马铃薯捡拾机主要由捡拾装置、薯土分离装置、薯块升运装置、薯块收集装置、传动系统、液压装置以及支撑轮、机架等部件组成,其结构如图1所示。
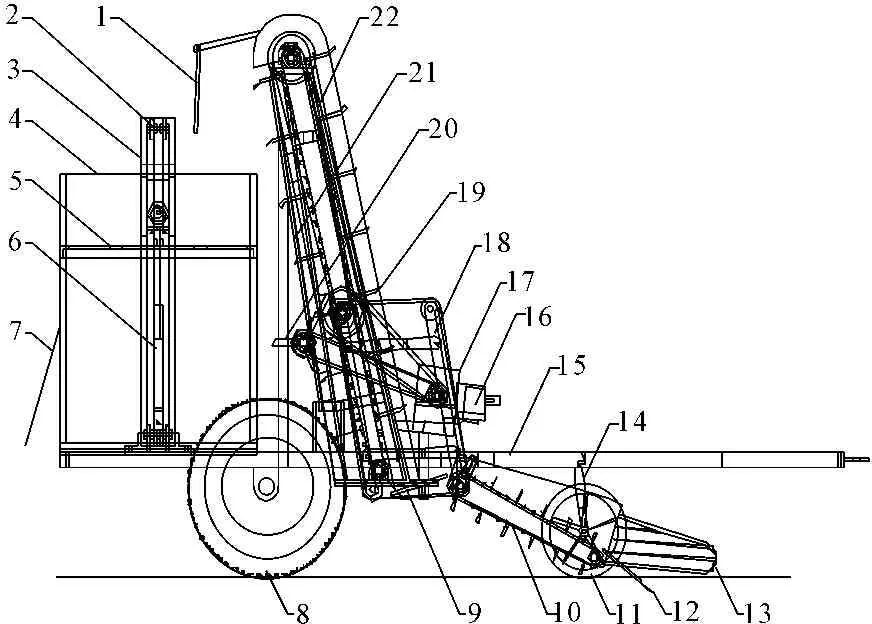
注:1.弹性橡胶挡帘; 2.箱底提升滑轮; 3.箱底提升架; 4.集薯箱; 5.活动箱底; 6.箱底提升液压缸; 7.卸料口; 8.支撑轮; 9.过渡耙齿; 10.杆条式分离输送链; 11.仿形轮; 12.捡拾铲; 13.防漏薯栅条; 14.仿形轮高度调节机构; 15.机架; 16.液压泵; 17.传动箱; 18.连接架; 19.升运耙; 20.除杂刀组; 21.升降轨道; 22.升运链
Note: 1. Elastic rubber check curtain; 2. Lifting block of box bottom; 3. Lifting frame of box bottom; 4. Potato collecting box; 5. Mobile box bottom; 6. Lifting hydrocylinder of box bottom; 7. Discharge port; 8. Stabilizing wheel; 9. Transition tine; 10. Bar type separating and conveying chain; 11. Copying wheel; 12. Pickup shovel; 13. Bars of preventing leakaging potato; 14. Height adjustment mechanism of copying wheel; 15. Rack; 16. Hydraulic pump; 17. Transmission case; 18. Connecting frame; 19. Hoisting rake; 20. Knife set; 21. Lifting orbit; 22. Hoisting chain
图1小型马铃薯捡拾机结构示意图
Fig.1Structure diagram of the small potato pickup machine
该小型马铃薯捡拾机采用牵引式与拖拉机连接,动力由拖拉机后动力输出轴提供。仿形轮控制捡拾铲入土深度并随地表起伏做同步仿形,防漏薯栅条将薯带边缘处的薯块向中间收拢,薯土混合物经捡拾装置喂入杆条式分离输送链上,土壤由杆条间隙落回地表,薯块则输送至过渡耙齿上,被升运耙向上托送,到最高位置后抛离升运耙,与弹性橡胶挡帘相撞,落入集薯箱。操作液压手柄,使活动箱底每次下降预设高度,待集薯箱装满薯块后,将机具停至地头卸料。
1.2主要技术参数
主要技术参数如表1所示。
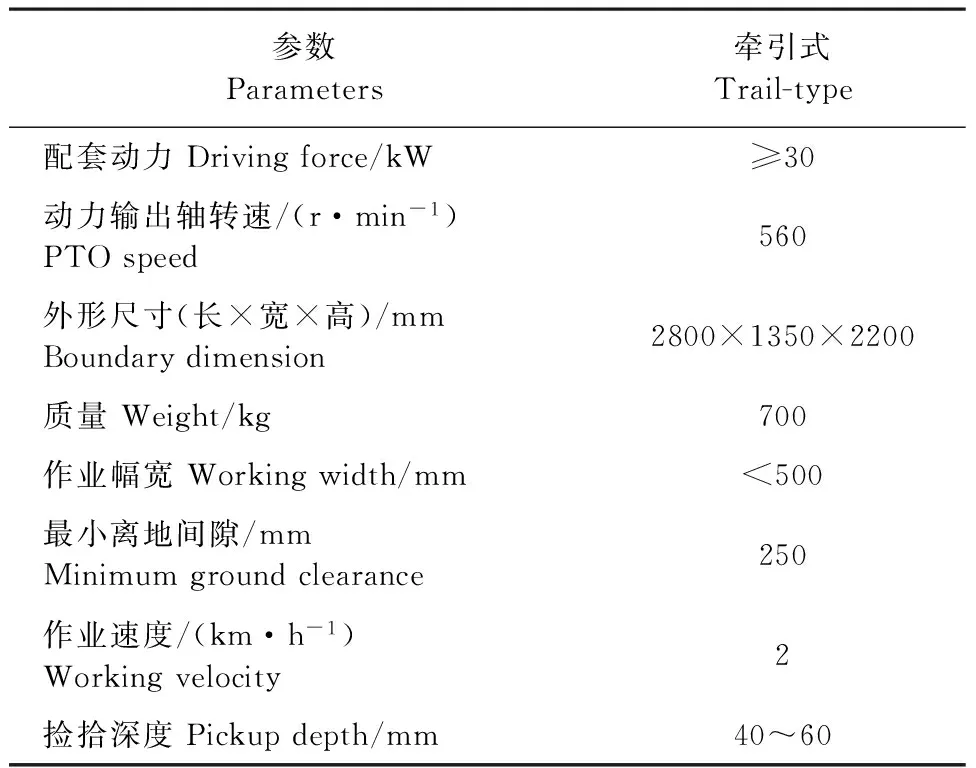
表1 小型马铃薯捡拾机主要技术参数
2 关键部件设计
2.1捡拾装置设计
捡拾铲工作倾角α关系到机具工作阻力、捡拾铲长度以及薯块捡拾难易程度;恰当且稳定的入土深度l是捡拾作业顺利进行的关键。为确定以上两个关键参数,结合薯块在地表的分布深度,如图2所示,设计并制造了试验台,如图3所示。经查阅文献及大量试验,确定捡拾铲工作倾角α=30°,入土深度l=40~60 mm。
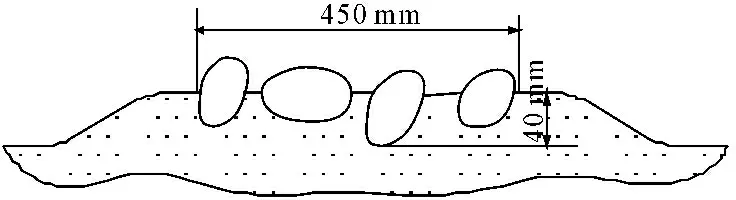

图2 捡拾前薯带分布示意图
注:1.杆条式分离输送链; 2.长搅土齿; 3.短搅土齿; 4.捡拾铲; 5.防漏薯栅条; 6.仿形轮; 7.仿形轮高度调节机构
Note: 1. Bar type separating and conveying chain; 2. Long mixing soil tooth; 3. Short mixing soil tooth; 4. Pickup shovel; 5. Bars for potato leakage prevention; 6. Copying wheel; 7. Height adjustment mechanism of copying wheel
图3捡拾装置试验台
Fig.3Test bed of the potato pickup unit
根据薯块在地表的分布宽度,如图2所示,确定捡拾装置作业幅宽为500 mm。捡拾铲由铲片和滑薯栅条焊接组成,参照马铃薯挖掘机挖掘铲的尺寸及试验,铲片长度与捡拾装置作业幅宽相同,为500 mm,宽度为l1=60 mm,选用耐磨的中碳钢65Mn制造;滑薯栅条选用直径为10 mm的圆钢,长度为l2=190 mm,根据设计要求中马铃薯最小方向尺寸,确定栅条间隙为30 mm。
本设计利用仿形轮及其高度调节机构来满足地形变化对捡拾铲铲尖与仿形轮行走地面的垂向距离可调的要求,且保证捡拾深度稳定。参阅资料[35]及田间试验,确定仿形轮直径为300 mm,宽度为40 mm,结构如图3所示。
2.2薯土分离装置设计
薯土分离装置结构如图3所示,主要部件为杆条式分离输送链[36],即将直径为10 mm的圆钢用螺栓连接固定在双耳链条上,其工作倾角β、有效输送距离L及线速度v1是影响薯土分离及薯块输送的关键参数。利用捡拾装置试验台进行试验,确定杆条式分离输送链工作倾角β=25°。为了保证输送顺畅,在分离输送链杆条上装有一定数量按规律排列的长、短搅土齿,长度分别为50、25 mm。本文取机具最小离地间隙Hmin=250 mm;输送链宽度与捡拾铲长度相同,为500 mm。捡拾、分离输送装置简图如图4所示,有效输送距离L可由下式确定。最终取L=600 mm。

图4捡拾、输送装置示意图
Fig.4Schematic diagram of the potato pickup and
transportation unit
L=[Hmin+l-(l1+l2)sinα]/sinβ
(1)
式中,Hmin为机具最小离地间隙,mm;l为捡拾铲入土深度,mm;l1为捡拾铲铲片宽度,mm;l2为捡拾铲滑薯栅条长度,mm;α为捡拾铲工作倾角,°;β为杆条式分离输送链工作倾角,°。
薯块在捡拾铲和分离输送链上的运动如图5所示,杆条式分离输送链线速度v1可由下式确定:
v1=v机/cosαcos(α-β)
(2)
式中,v机为动力机前进速度,km·h-1;α为捡拾铲工作倾角,°;β为杆条式分离输送链工作倾角,°。

图5薯块运动示意图
Fig.5Schematic diagram of potato movement
根据式(2)计算结果并利用捡拾装置试验台进行检验,确定杆条式分离输送链线速度v1=2.2 km·h-1。
2.3薯块升运装置设计
薯块升运装置结构如图6所示,在钢丝绳作用下沿轨道移动,轨道与铅垂面呈10°夹角,既可防止薯块在升运过程中滚落,又利于薯块脱离升运耙。工作时,将薯块升运装置下落至最低点,与过渡耙齿配合,将薯块托送至集薯箱。单个薯块的平均尺寸为:长度60~120 mm,宽度46~75 mm,厚度37~58 mm[37],通过实地测量统计薯块最大方向尺寸,如表2所示,确定相邻两升运耙之间的距离为150 mm,耙齿长度为120 mm;根据设计要求中马铃薯最小方向尺寸,取耙齿间隙为30 mm;薯块升运装置后上方装有弹性橡胶挡帘。
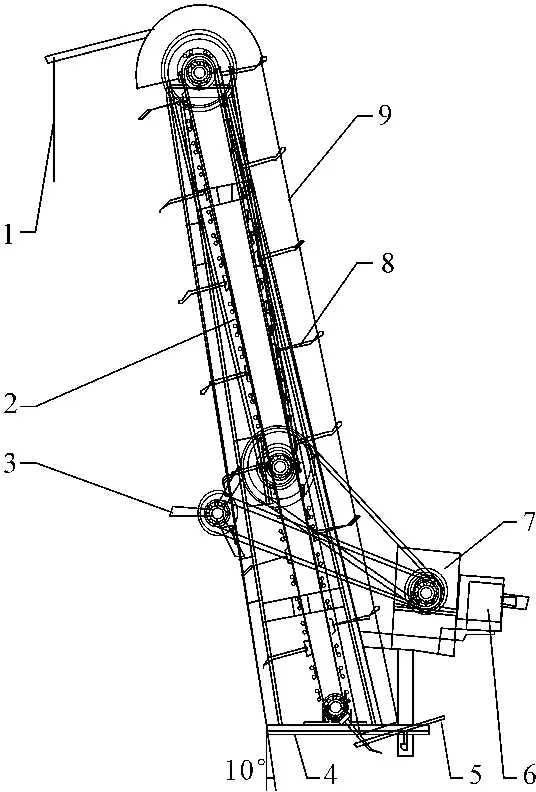
注:1.弹性橡胶挡帘; 2.升运链; 3.除杂刀组; 4.升运架; 5.过渡耙齿; 6.液压泵; 7.传动箱; 8.升运耙; 9.侧板
Note: 1. Elastic rubber check curtain; 2. Hoisting chain; 3. Knife set; 4. Hoisting frame; 5. Transition tine; 6. Hydraulic pump; 7. Transmission case; 8. Hoisting rake; 9. Side panel
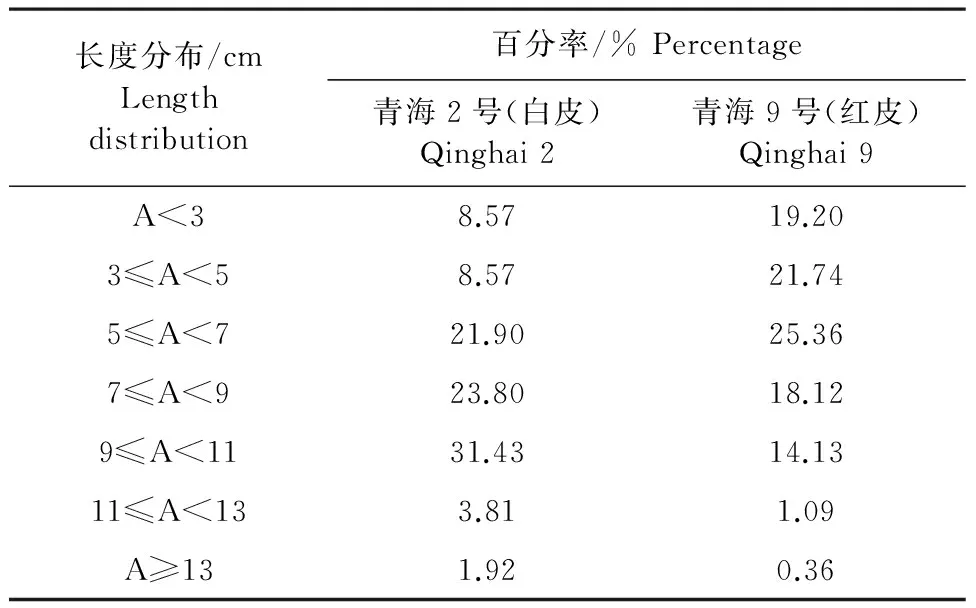
图6 薯块升运装置结构示意图
2.4薯块收集装置设计
薯块收集装置主要由集薯箱、箱底提升液压缸和滑轮组件等组成,结构如图7所示。集薯箱尺寸(长×宽×高)为1000 mm×800 mm×900 mm。薯块安全下落高度 是影响集薯伤薯率的关键参数。根据跌落损伤试验测得,当马铃薯下落高度小于300 mm时,马铃薯损伤率小于3%,而本文中箱体高度为900 mm,因此,设计了可沿箱壁升降的活动箱底,由液压缸及滑轮组件带动。操作液压手柄,使活动箱底每次下降300 mm,直至集薯箱内装满薯块。
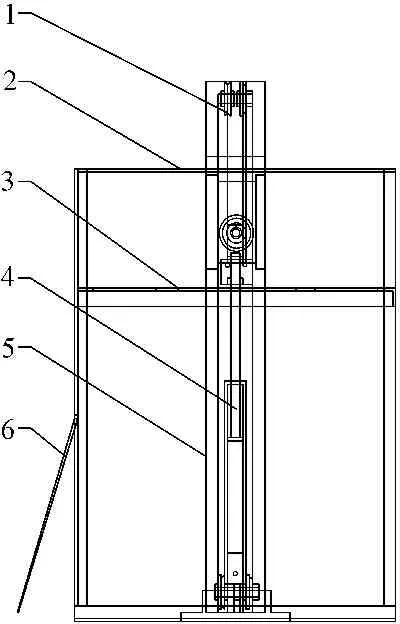
注:1.箱底提升滑轮; 2.集薯箱; 3.活动箱底; 4.箱底提升液压缸; 5.箱底提升架; 6.卸料口
Note: 1. Lifting block of box bottom; 2. Potato collecting box; 3. Mobile box bottom; 4. Lifting hydrocylinder at box bottom; 5. Lifting frame of box bottom; 6. Discharge port
图7薯块收集装置结构示意图
Fig.7Structural diagram of potato collecting unit
3 田间试验
3.1试验条件
2014年9月在青海省平安县进行了田间样机捡拾试验。试验地地势平坦,为沙壤土垄播旱地,含水率约为20%。试验前一周植株经割秧处理,先由双行马铃薯挖掘机将薯块挖出,条铺于地表,薯条分布情况如图2所示,然后进行捡拾试验。试验区长度为70 m,宽度约为40 m,马铃薯品种为青海2号(白皮)和青海9号(红皮)。试验地垄高200 mm,垄底宽700 mm,垄顶宽400 mm,双排种植,排距150 mm,株距400 mm,垄形如图8所示。试验配套动力为约翰迪尔JD—404型拖拉机,样机田间试验如图9所示。

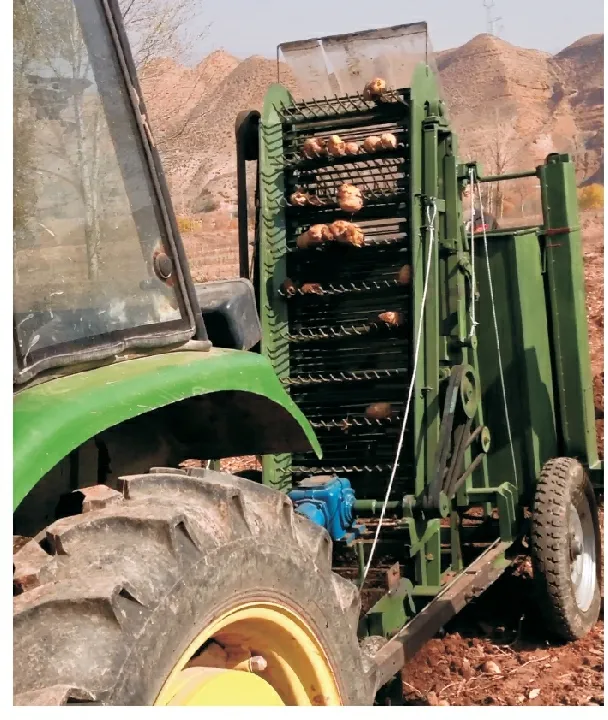
图8 试验地垄形示意图
图9样机田间试验
Fig.9Field test on the prototype
3.2试验方法
按照国家行业标准的规定进行捡拾试验[38]。试验时,机器行进速度2 km·h-1,捡拾铲铲面倾角30°,以30 m长的薯带为一个试验区,每种薯均重复试验3次,每次试验完成后测定机组纯工作小时生产率、伤薯率、漏薯率、含杂率4个指标,考察捡拾机薯块捡拾、薯土分离、薯块输送、薯块收集及卸料、传动系统、液压操纵装置等各部分及整机的工作性能。另外,对最小尺寸小于30 mm的马铃薯不予考虑。
3.3试验结果
小型马铃薯捡拾机田间试验主要性能指标如表3所示。
试验结果表明:该机适合在土质松软、无板结的沙壤土条件下进行马铃薯捡拾。薯块捡拾、输送顺畅,薯土分离效果明显,整机性能稳定,可大大提高生产效率,减轻劳动强度。机组纯工作小时生产率为0.35~0.38 hm2·h-1,捡拾伤薯率为4.4%,漏薯率为2.1%,含杂率为6.3%,除含杂率外,其它指标均达到国家行业标准。

表3 小型马铃薯捡拾机田间试验主要性能参数
存在的主要问题:部分根系随薯块进入集薯箱,导致含杂率偏高,可通过增加茎秆清除装置加以解决。
4 结 论
1) 小型马铃薯收获机对中小地块适应性强,可大大提高生产效率,减轻劳动强度,在当前小型挖掘机普遍应用、马铃薯收获机械化程度日益提高的背景下,本设计小型马铃薯捡拾机具有广阔的应用前景。
2) 本设计小型马铃薯捡拾机捡拾铲工作倾角为30°,入土深度为40~60 mm;薯土分离装置宽度为500 mm,长度为600 mm;杆条式薯块输送链线速度为2.2 km·h-1,工作倾角25°;马铃薯安全下落高度为30 mm。
3) 本设计小型马铃薯捡拾机机组纯工作小时生产率为0.35~0.38 hm2·h-1,伤薯率为4.4%,漏薯率为2.1%,含杂率为6.3%,含杂率高于国家相关标准。该机性能稳定,能够完成马铃薯挖掘、条铺后的捡拾、输送和收集,满足设计要求。
[1]张德学,张广玲,吕钊钦.马铃薯地表残膜回收机的设计[J].农机化研究,2014,(8):111-113.
[2]刘鹏霞.单行牵引式马铃薯联合收获机的改进设计[D].兰州:甘肃农业大学,2009.
[3]杨莉.马铃薯挖掘机摆动分离筛的仿真与参数优化[D].呼和浩特:内蒙古农业大学,2009.
[4]贾晶霞,邵博,常圣,等.马铃薯综合生产能力测算与评价[J].农业工程,2014,4(1):1-3.
[5]Po Edgar A, Snapp, S S, Kravchenko A. Potato yield variability across the landscape[J].Agronomy Jounal, 2010,102(3):885-894.
[6]刘海超,王春光,顾丽霞.马铃薯在摆动分离筛上的动力学试验研究[J].中国农机化学报,2013,34(1):70-72.
[7]王学军,蒋金琳.小型薯类联合收获机设计与田间试验[J].农机化研究,2014,(2):176-178.
[8]石林榕,吴建民,赵武云,等.圆盘栅式马铃薯挖掘机的研制与试验[J].农业工程学报,2012,28(24):15-16.
[9]Bentini M, Caprara C, Martell R. Harvesting damage to potato tubers by analysis of impacts recorded with an instrumented sphere[J]. Biosystems Engineering, 2006,94(1):75-85.
[10]Al-Mallahi A, Kataoka T, Okamoto H, et al. Detection of potato tubers using an ultraviolet imaging-based machine vision system[J]. Biosystems Engineering, 2010,105(2):257-265.
[11]Adel Hosainpour, Mohammad H, Komarizade, et al. High speed detection of potato and clod using an acoustic based intelligent system[J]. Expert System swith Applications, 2011,38:12101-12106.
[12]Persson D A, Eklundh L, Algerbo P A. Evaluation of an optical sensor for tuber yield monitoring[J]. Transactions of the Asae, 2004,47(5):1851-1856.
[13]高明全,张旭东,刘维佳,等.2CM-2型马铃薯播种机关键部件的设计[J].沈阳农业大学学报,2012,43(2):237-240.
[14]史明明,魏宏安,刘星,等.国内外马铃薯收获机械发展现状[J].农机化研究,2013,(10):213-215.
[15]杨德秋,贾晶霞,越文峰,等.高度自控式马铃薯联合收获机升运装车装置[J].农机化研究,2011,(9):96-99.
[16]李彦晶,魏宏安,孙广辉,等.4U一1400FD型马铃薯联合收获机挖掘铲的参数优化[J].甘肃农业大学学报,2011,46(5):132-136.
[17]金钟玉,陈长海,毕春辉,等.黑龙江省马铃薯种植全程机械化技术初探[J].农机使用与维修,2014,(2):80-81.
[18]孔令亮.马铃薯联合收获机输送装置的设计与研究[D].呼和浩特:内蒙古农业大学,2013.
[19]史明明,魏宏安,胡忠强,等.4U-1400型马铃薯联合收获机的设计[J].干旱地区农业研究,2014,32(1):263-267.
[20]魏宏安,张俊莲,杨小平,等.4UFD-1400型马铃薯联合收获机改进设计与试验[J].农业工程学报,2014,30(3):12-17.
[21]王公仆,蒋金琳,田艳清,等.马铃薯机械收获技术现状与发展趋势[J].中国农机化学报,2014,35(1):11-15.
[22]贾晶霞,杨德秋,李建东,等.马铃薯收获机市场研究与预测[J].农业工程,2012,2(2):24-29.
[23]杨小平,史明明,魏宏安,等.4UFD—1400型马铃薯联合收获机功能原理的设计[J].中国农机化学报,2013,34(5):109-113.
[24]宋言明,王芬娥.国内外马铃薯机械的发展概况[J].农机化研究,2008,(9):224-227.
[25]初旭宏,黄丙申.马铃薯收获机械存在的主要问题及解决办法[J].农机使用与维修,2010,(1):46-47.
[26]宋言明,王芬娥.新型马铃薯联合收获机的总体设计[J].甘肃农业大学学报,2009,44(1):151-154.[27]王建波,樊放洲,田延庆,等.马铃薯挖掘机关键部件的研究现状与展望[J].农机化研究,2011,(1):244-248.
[28]刘宝,张东兴,李晶.马铃薯收获机主要问题机理分析及其对策[J].农机化研究,2009,(1):14-16.
[29]郗福兵.马铃薯挖掘机分离筛振动仿真测试研究[D].内蒙古:内蒙古农业大学,2008.
[30]李维科.4M-2型马铃薯联合收获机传动系统的研究[J].机械研究与应用,2008,21(5):63-66.
[31]孙宗国.4U-2型马铃薯收获机的研制[J].农业科技与装备,2009,(3):74-76.
[32]罗彤娥.4UM-640型马铃薯挖掘机的研究与设计[D].兰州:甘肃农业大学工学院,2011.
[33]陶桂香,刘玉明,衣淑娟.CS-150型马铃薯收获机的研制[J].黑龙江八一农垦大学学报,2008,20(4):38-40.
[34]李涛,康王景,孙伟,等.4U-1000型马铃薯挖掘机的设计与试验[J].甘肃农业大学学报,2013,48(3):151-155.
[35]刘宝,张东兴,李晶.MZPH-820型单行马铃薯收获机设计[J].农业机械学报,2009,40(5):81-86.
[36]王方艳,张东兴.圆盘挖掘式甜菜联合收获机设计与试验[J].农业工程学报,2013,29(13):7-14.
[37]吴建民,李辉,孙伟,等.拨指轮式马铃薯挖掘机设计与试验[J].农业机械学报,2010,41(12):76-79.
[38]中华人民共和国农业部.NY/T648—2002马铃薯收获机作业质量评价技术规范[S].北京:中国标准出版社,2003.
Design and test of a small potato pickup machine
SHI Yong, YAN Xiao-li, ZHU Rui-xiang, LI Jiang, HUANG Shan-shan, LIU Yuan
(CollegeofMechanicalandElectronicEngineering,NorthwestA&FUniversity,Yangling,Shaanxi712100,China)
Currently, the domestic potato excavator can only excavate the potatoes, but it can’t pick them up, which requires additional human labor, resulting in low working efficiency and high labor intensity. To address these problems, this paper discusses a design of a small potato pickup machine which is compatible with the 30 kw tractor. This machine is mainly composed of pickup device, potato soil separation device, potato elevator device and potato collection device. The prototype has been finished and the test was carried out in the field. The test showed that it could separate potato and soil thoroughly. The pure hour productivity was 0.35~0.38 hm2·h-1, the average damaged potatoes rate was 4.4%, the potato leakage rate was 2.1%, and the impurity rate was 6.3%, demonstrating that it has a broad application prospect.
potato harvesting; potato pickup; research
1000-7601(2016)04-0287-05
10.7606/j.issn.1000-7601.2016.04.43
2015-07-07
杨陵示范区科技计划项目
时永(1988—),男,河北唐山人,硕士研究生,研究方向为现代农业装备技术。 E-mail:shiliuxiabeizi@163.com。
朱瑞祥(1956—),男,陕西三原人,教授,硕士生导师,主要从事农业机械化技术及装备研究。 E-mail:zrxjdxy2006@sohu.com。
S225.2+3
A
