基于珠式模型的绳系卫星安全交会过程建模与仿真
2016-10-18冯杰孙铁成王剑谢明玻
冯杰,孙铁成,王剑,谢明玻
(火箭军指挥学院,武汉430012)
基于珠式模型的绳系卫星安全交会过程建模与仿真
冯杰,孙铁成,王剑,谢明玻
(火箭军指挥学院,武汉430012)
安全交会是绳系卫星空间应用的一个重要拓展。为满足安全交会的高精度需求,考虑重力、拉力和阻尼力的作用建立了绳系卫星系统三维珠式模型。讨论并选择了一种匀速-匀减速展开策略,推导得到平衡位置零相对速度条件下的安全交会末端约束,在此基础上基于反馈线性化基本原理设计了一种子星喷气推力的安全交会控制律。数值仿真基于低轨道和地球同步轨道条件来进行,4个算例的仿真结果验证了珠式模型条件下,匀速-匀减速展开策略及反馈线性化交会控制律的理论可行性,且交会控制力需求表现为同步轨道低于低轨。该方法可为绳系卫星精确交会技术提供一定参考。
绳系卫星,珠式模型,安全交会,反馈线性化
0 引言
最早的关于空间系绳的应用可追溯到1895年俄国科学家Konstantin Tsiolkovsky的文章“Day-dreamsofHeaven and Earth”,文中描绘了一种借助攀登高塔来“逃离”地球的设想[1]。在Tsiolkovsky新奇灵感的引导下,各种关于绳系卫星空间应用的奇思妙想纷至沓来,归纳起来主要有空间在轨服务、导电系绳、轨道转移、微重力、空间运输、深空探测、交会与捕获等[2-3]。
利用绳系卫星实施空间交会与捕获具有成本低、能耗少、可重复使用、污染小等诸多优点,近年来一直受到国内外相关领域学者的广泛关注。Williams[4]研究了小倾角条件下的三维绳系系统的空间交会和捕捉问题,假设系绳为刚性直杆,利用给定的交会条件,基于Legendre伪谱算法解得该问题的最优控制律。为改善交会窗口,Williams和Blanksby[5]使用系绳上可变位置的调节质量(Actu-atorMass)来激励交会过程中系绳末端的动力学响应,从而延长了交会时间。Lorenzini[6]提出了一种新的交会控制方法:将旋转中的绳系系统位置、速度误差通过开环控制反馈到空间负载上的吊钩处。崔本延[7]介绍了在R-bar和V-bar方向的5种绳系交会对接方案,并对其进行了深入的分析和对比。陈辉[8]采用高斯伪谱算法研究了初始释放条件固定、未定以及含有参数反馈时的空间绳系捕捉系统的最优控制问题。
从已公开发表的文献来看,以往对绳系卫星空间交会应用的研究绝大多数都未对交会速度作严格限定,且在建立动力学模型时往往忽略了系绳弹性、可弯曲性等因素(将系绳视作刚性杆或弹性直杆),难以满足空间交会的高精度需求。本文重点研究柔性系绳条件下的绳系卫星安全交会问题。安全交会一方面可有效减轻空间碎片的威胁;另一方面便于对“部分失效”目标实施在轨服务或回收,修复后再重复利用,从而节约成本。首先考虑重力、拉力和阻尼力的作用,建立了系绳珠式动力学模型;尔后讨论了匀速—匀减速展开策略,分析得到了平衡位置安全交会的末端约束条件,并在此基础上基于子星喷气推力设计了一种反馈线性化交会控制律;最后完成了4个算例的数值仿真。
1 绳系卫星动力学建模
1.1系统基本描述
关于绳系卫星系统柔性系绳的建模方法主要有两种,一是考虑系绳位形和分布质量的模型,二是采用质点、弹簧和阻尼单元来模拟系绳的模型。第1种模型得到的是连续偏微分方程,求解起来非常困难,利用Ritz法求近似解则计算效率无法保证,且误差难以确定。第2种模型(即珠点模型)建模方便,得到的是一组非线性常微分方程组,当单元取到足够多能够较好地逼近系绳的空间运动,但计算效率会随珠点数量增加而降低。为保证仿真效率,本文优先选择了第2种建模方法。
为突出对弹性系绳的模拟,建模前假设母、子星均为质点,不考虑这两个端体的三维天平动和弹性响应的影响,也不考虑系绳的扭转运动。另外假设母星的质量相比子星要大得多,即系统质心与母星位置重合。在以上假设的前提下,建立如图1所示的绳系卫星系统珠式模型。
为方便描述母、子星之间的相对运动,图1中采用了自定义的坐标系。地心惯性坐标系OXYZ:原点在地球质心O,OX、OY均位于主星轨道面,OX轴指向设定的主星初始位置,OZ轴指向轨道面的正法向。主星轨道坐标系oxyz:原点在母星质心o(假设系统质心与主星质心重合),oy轴指向主星矢径方向,oz轴与OZ轴同向,ox轴由右手法则确定。R0为由地心至主星的距离;mi为第i(i=1,…,n)个珠点的质量。
由于珠式模型中系绳是由无质量黏弹性的弹簧连接起来的珠点所组成的,因此,各珠点主要受到弹性力、阻尼力和重力的作用。根据牛顿力学原理,可得主星轨道坐标系内任意珠点mi的动力学方程组:
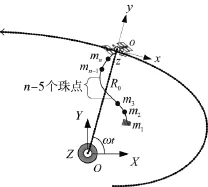
图1 绳系卫星系统珠式模型示意图

其中Fig、Fis和Fid分别为珠点mi所受的重力、弹性力及阻尼力。为便于构造控制模型,将重力项Fig线性化展开:

将式(2)代入式(1),可得标量形式的动力学方程:

1.2质量方程

质量方程可写为其中ρ为系绳线密度;mp为子星质量;Li为第i段系绳标称长度。
1.3系绳拉力
第i段系绳的应变为

其中

根据胡克定律,第i段系绳拉力Ti为

则第i个珠点所受系绳拉力为

结合式(6)、式(7)和式(8),可得标量形式的系绳拉力方程

其中

且有k0=0。
1.4阻尼力
由于系绳材料的内部结构摩擦,应变能将会慢慢耗散,而纵向的伸长也会缓慢地变小。这个现象被称作滞后阻尼,通常假设其与应变变化率呈比例关系。第i段系绳长度li为

式(11)对时间求导可得

则

又
由

式(13)可写为

则第i段系绳上的阻尼力为

其中C为阻尼系数(与系绳材料有关)。第i个珠点所受阻尼力为

将其化为标量形式

其中

且c0=0。
2 面内安全交会过程规划
2.1系绳展开策略
系绳完全展开后,可为安全交会控制过程提供初始状态基准。对于长距离系绳,精确控制系绳拉力难度很大,因此,本文优先选择了基于展开速率的匀速-匀减速展开策略:初始条件中假设系统已经展开了两个珠点并继续保持匀速展开过程,释放方向固定为oy轴反向;当倒数第2个珠点展开完毕时,系统进入匀减速展开过程,保证最后一个珠点释放结束时为0。这一过程的释放程序为:

其中C1为展开速度,a为减速展开过程加速度,均为常量;k为已展开的珠点数;n为预定展开的珠点数。
另外,借助珠式模型实现系绳的展开,关键是如何处理增加珠点的状态转换过程。珠式模型中对于系绳展开过程的处理方式有两种,第1种方式是保持系绳的珠点数目不变,但是在展开过程中,随着释放出来系绳部分的质量和长度变化,相应地改变模型中系绳中每个珠点的质量和珠点之间每一个绳段的标称长度;第2种方式是保持珠点的质量和珠点之间绳段的标称长度不变,但是以改变相邻母星的珠点与母星之间连接绳段长度的方式来实现模型中系绳的展开,当这个绳段的长度增大到一定程度,就相应地在系绳中增加一个珠点。本文仿真过程中选择了第2种珠点更新方式。
2.2面内安全交会的末端约束
利用系绳末端对空间目标实施安全交会需要考虑规避碰撞。碰撞的产生是由于在交会瞬间系绳末端与目标存在速度偏差,此外系绳长度误差不仅会造成位置偏差,还会引起相对速度的偏差。安全交会的本质则是消除或尽量减小系绳末端与交会目标之间的相对运动趋势。
设绳系网捕系统、目标载荷分别运行于半径为Rs、Rp的共面圆轨道,与之相对应的角速度分别为ωs、ωp。建立面内轨道坐标系o-x1y1,如图2所示。

图2 面内轨道坐标系
理论上来说,只要系绳长度满足需求,则可在任意位置对目标载荷实施安全交会。然而从历次绳系空间实验来看,系绳在完全展开后由于角速度不为零,会在平衡位置左右摆动多次,尔后逐渐在阻尼作用下停到平衡位置。因此,本文将交会点选为更具一般意义的平衡位置(即θ=0时)。
假设面内安全交会瞬间面内轨道坐标系内子星状态为(x1,y1,x.1,y.1),则其必须满足
2.3反馈线性化控制律
反馈线性化方法的目的是通过对非线性系统进行精确线性化处理后,将原系统变换成线性系统。考虑借助子星喷气推力的方式实现子星的安全交会过程,根据反馈线性化控制的基本原理,设线性化后子星的动力学方程为

其中()1d为安全交会所需的末端状态;ki(i=1,…,6)为增益系数,可根据系统初始、末端条件利用解析法求解。则子星喷气推力控制律为:

其中Fx、Fy、Fz为子星喷气推力在主星轨道坐标系内的三轴分量。
3 仿真算例
仿真时假设母星位于700 km、35 786 km(地球同步轨道)高的圆轨道,交会目标轨道高度对应为690 km和35 776 km,且两者共形同面。地心引力常数GM取3.986 005×1014m3/s2,子星质量为100 kg。系绳仿真参数定为:系绳横截面半径为2mm;线密度μ¯为2.88 g/m;弹性模量E为30GPa;阻尼率取0.001;匀速展开过程展开速度为2m/s。由于系绳在展开过程中会产生弯曲现象,为避免交会控制时由于状态约束过于苛刻所导致的系绳张力过大,仿真时对系绳展开长度未严格限定为10 km,而是额外多展开了一个珠点的长度,即系绳珠点数取101,相邻珠点间的标称绳长分别为0.1 km。
下页图3、图4分别为绳系系统在低轨、同步轨道匀速—匀减速展开10.1 km系绳的整个过程。最终系绳均完全展开,且展开过程中系绳拉力始终保持为正,这说明匀速-匀减速展开策略能够克服系绳松弛现象,从而有效降低系绳缠绕的风险。
安全交会控制的起点为系绳完全展开后进入状态保持阶段的某点,选择标准为:面内角约为5°(若不足则取最大值),子星位于母星下后方且向前摆动。取增益系数,解得低轨、同步轨道交会控制时间分别为213 s和1 495 s。安全交会过程及控制历程如图5~图8。

图3 低轨道系绳展开过程

图4 同步地球轨道系绳展开过程

图5 低轨道安全交会过程
4 结论

图6 同步地球轨道交会过程

图7 低轨道安全交会控制历程
安全交会是绳系卫星高精度空间应用的一个重要拓展。为更精确地模拟弹性系绳的基本特性,基于珠式模型讨论了系绳面内匀速—匀减速展开策略,对在平衡位置实施安全交会的末端条件进行了分析,并设计了一种反馈线性化交会控制律。4个算例的仿真结果基本验证了所提方案的理论可行性,且表明对同等长度的系绳,同步轨道的交会控制力需求要低于低轨。在本文的基础上将交会目标延伸至轨道面外,探索交会窗口的优化方法,提高控制效率是下一步值得深入研究的问题。

图8 同步地球轨道安全交会控制历程
由以上仿真结果可见,最终子星均达到了式(23)所描述的末端条件。在对子星施加了喷气推力的作用后,发现系绳平均应变水平及各珠点的速度大小相比展开过程有所增加。另外,同为10.1 km的绳长,控制力需求表现为同步轨道低于低轨。
通过4个算例的数值仿真,基本验证了珠式模型条件下,匀速—匀减速展开策略及反馈线性化交会控制律的理论可行性。由于初始条件并不理想(系绳展开后未实施状态稳定控制,以削弱面内摆角),所以造成了控制力需求较高,且径向控制力均大于切向(表现为将系绳拉直)。仿真时对于不同的轨道条件取了相同的珠点数量,但系绳模拟的平滑程度却大不相同(同步轨道条件下要明显优于低轨),这说明对于低轨道绳系卫星系统,需要更精细的分割系绳单元。
[1]PEARSON J.Konstantin tsiolkovski and the origin of the spaceelevator[C]//IAF,InternationalAstronauticalCongress,48th,Turin,Italy,1997,10.
[2]MANKALA K K.Satellite tether systems:dynamicmodeling and control[D].Newark:University ofDelaware,2006.
[3]COSMO M L,LORENZINIE C.Tethers in space handbook[EB/OL].1997[2000].http://www.nasa.gov/centers/marshall/pdf/337451main_Tethers_In_Space_Handbook_Section_1_2.pdf.
[4]WILLIAMSP.Spacecraft rendezvous on small relative inclination orbits using tethers[J].Journal of Spacecraft and Rockets,2005,42(6):1047-1060.
[5]WILLIAMSP,BLANKSBY C.Prolonged payload rendezvous using a tether actuatormass[J].Journal of Spacecraft and Rockets,2004,41(5):889-892.
[6]LORENZINI E C.Error-tolerant technique for catching a spacecraftwith a spinning tether[J].Journal of Vibration and Control.2004,10:1473-1491.
[7]崔本廷.空间绳系的控制与应用[D].长沙:国防科学技术大学,2006.
[8]陈辉.用系绳进行空间捕捉的最优控制研究[D].南京:南京航空航天大学,2008.
M odeling and Simulation of SafeRendezvousCourse Using Tethered Subsatellite Based on Bead M odel
FENG Jie,SUN Tie-cheng,WANG Jian,XIEMing-bo
(Rocket Force Command College,Wuhan 430012,China)
Safe rendezvous is an important development of the space application of tethered subsatellite.Considering the factors of gravity,tension and damping force,the three dimensional bead model is built to satisfy the high precision demand.The terminal condition for safe rendezvous in equilibrium is discussed.The deployment strategy of uniform speed-uniform deceleration and a kind of rendezvous law based on feedback linearization are also proposed.The academic feasibility of the deployment strategy and rendezvous law proposed is validated by four cases of numerical simulations in the conditions of LEO and GEO.Furthermore,the numerical results behave as the power requirement at GEO is less than the LEO.Themethod could provide a certain reference for the technology of high precision rendezvous.
tethered subsatellite,beadmodel,safe rendezvous,feedback linearization
V448.2
A
1002-0640(2016)09-0103-05
2015-07-25
2015-08-27
冯杰(1982-),男,湖北宜昌人,博士。研究方向:空间工程理论及其应用。
